Table des matières
- Qu'est-ce qu'une centrale inertielle (IMU) ?
- Quels sont les composants de base d'une centrale inertielle (IMU) ?
- Quelles sont les applications courantes des centrales inertielles (IMU) ?
- Pourquoi l'IMU est importante dans les systèmes de navigation et de positionnement.
- MEMS IMU : Aperçu des MEMS IMU et de leurs applications.
- FOG IMU : centrale inertielle gyroscopique à fibre optique – cas d’utilisation dans les applications de haute précision
- Gyroscopes MEMS et FOG : une brève comparaison
- Instabilité de biais
- Biais initial
- Plage et résolution
- Facteur d'échelle et erreur d'échelle
- Bruit et densité du bruit
- Bande passante et fréquence d'échantillonnage
- marche aléatoire
- Facteurs à prendre en compte (spécifications de performance, environnement, taille, coût).
- Comprendre les exigences de votre application (par exemple, industrielle, électronique grand public, automobile).
- Erreurs courantes à éviter lors du choix d'une centrale inertielle.
Introduction
Les centrales inertielles (IMU) sont essentielles aux systèmes de navigation modernes. Qu'il s'agisse d'avions, de missiles, de voitures autonomes ou même de smartphones, ces capteurs jouent un rôle crucial dans la mesure du mouvement et de l'orientation, sans nécessiter de références externes comme le GPS. Au cours des vingt dernières années, le développement de la technologie MEMS a permis de réduire considérablement leur taille et leur coût, les rendant indispensables dans de nombreux secteurs industriels.
Ce guide complet vous présentera les principes fondamentaux des centrales inertielles (IMU), notamment leur fonctionnement, les différents types de capteurs qu'elles utilisent et l'importance de leurs performances. Des dernières innovations aérospatiales à l'électronique grand public, comprendre ce qu'est une IMU et comment elle fonctionne est essentiel pour toute personne impliquée dans la conception ou l'optimisation de systèmes de haute technologie. À la fin de cet article, vous disposerez des connaissances nécessaires pour choisir l'IMU la mieux adaptée à votre projet et ainsi répondre aux exigences les plus strictes.
Qu'est-ce qu'une centrale inertielle (IMU) ?
Une centrale inertielle (IMU) est un système de capteurs qui mesure l'accélération, la vitesse angulaire et souvent les champs magnétiques afin de déterminer l'orientation et le mouvement d'un objet dans l'espace. Elle comprend généralement des accéléromètres, des gyroscopes et parfois des magnétomètres. Ces composants fonctionnent de concert pour fournir des données essentielles à la navigation, à la stabilisation et au contrôle dans une vaste gamme d'applications, de l'aérospatiale et la robotique aux smartphones et aux véhicules autonomes. Les centrales inertielles sont indispensables dans les systèmes exigeant des données précises de mouvement et d'orientation.
Explorons en détail le monde des centrales inertielles.
Que sont les données du capteur IMU ?
Les données du capteur IMU sont constituées de signaux provenant de trois capteurs principaux :
- Accéléromètres : Mesurent l'accélération linéaire selon les axes X, Y et Z.
- Gyroscopes : Mesurent la vitesse de rotation ou la vitesse angulaire autour des mêmes axes.
- Magnétomètres (en option) : Mesurent le champ magnétique pour faciliter l’orientation dans l’espace, offrant une fonctionnalité similaire à celle d’une boussole.
Chacun de ces capteurs IMU fournit un flux de données qui, une fois combinées et traitées, offrent une image complète du mouvement et de l'orientation d'un objet. Ces données servent généralement à calculer des indicateurs importants tels que :
- Accélération : Variation linéaire de la vitesse.
- Vitesse angulaire : Taux de rotation autour d'un axe.
- Orientation : La position rotationnelle d'un objet dans l'espace 3D.
La précision des données des capteurs IMU est essentielle pour les systèmes nécessitant un suivi et une navigation en temps réel. Dans les domaines aérospatial, de la défense ou industriel, ces données permettent de guider avec une extrême précision un engin spatial, un aéronef ou un système robotisé.
Quels sont les composants de base d'une centrale inertielle (IMU) ? / Qu'est-ce qu'un capteur IMU ?
Lorsqu'on parle d'une centrale inertielle (IMU) , on fait en réalité référence à une combinaison de plusieurs capteurs principaux, chacun jouant un rôle crucial dans la mesure du mouvement et de l'orientation. Les principaux capteurs d'une IMU comprennent des accéléromètres , des gyroscopes et, dans de nombreux cas, des magnétomètres . Ces capteurs fonctionnent de concert pour nous fournir une compréhension globale du mouvement d'un objet dans l'espace. Analysons maintenant comment chacun de ces capteurs contribue au fonctionnement global de l'IMU.
La fonction principale de l'IMU est simple : elle mesure la vitesse de déplacement d'un objet (accélération linéaire) et sa vitesse de rotation (vitesse angulaire). Ces données servent ensuite à calculer sa position, sa vitesse et son orientation au fil du temps. On peut la considérer comme le système d'équilibre interne des machines. Qu'il s'agisse de guider un drone dans les airs, d'aider une voiture autonome à se repérer ou de stabiliser l'écran d'un smartphone, l'IMU garantit que les systèmes conservent une connaissance précise de leurs mouvements en permanence.
Accéléromètre IMU : que mesure un accéléromètre ?
L' accéléromètre mesure l'accélération linéaire selon un ou plusieurs axes. En d'autres termes, il indique la vitesse à laquelle un objet accélère ou ralentit. Cette mesure est essentielle pour calculer la vitesse et les variations de position au fil du temps. Par exemple, dans une voiture, l'accéléromètre mesure les forces exercées lorsque le véhicule accélère, ralentit ou prend des virages serrés.
D'après mon expérience, les accéléromètres sont essentiels au suivi de mouvement dans la plupart des systèmes. Qu'il s'agisse de drones, de smartphones ou d'équipements industriels, les accéléromètres fournissent les données fondamentales nécessaires au calcul du mouvement.
Gyroscope IMU : Que mesure un gyroscope ?
Le gyroscope de l'IMU mesure la vitesse angulaire, c'est-à-dire la vitesse de rotation d'un objet autour de ses axes. Si vous avez déjà vu une toupie tourner sur une table, c'est précisément cette rotation que détecte un gyroscope. Ce capteur nous aide à déterminer l'orientation d'un appareil, ce qui est particulièrement utile pour stabiliser des systèmes ou suivre avec précision le mouvement de rotation d'un objet.
J'ai constaté le rôle essentiel des gyroscopes dans les systèmes de navigation, notamment dans le domaine aérospatial. Lorsque la précision est primordiale, un gyroscope de haute qualité garantit un suivi précis de l'orientation, même en présence de facteurs externes tels que les turbulences.
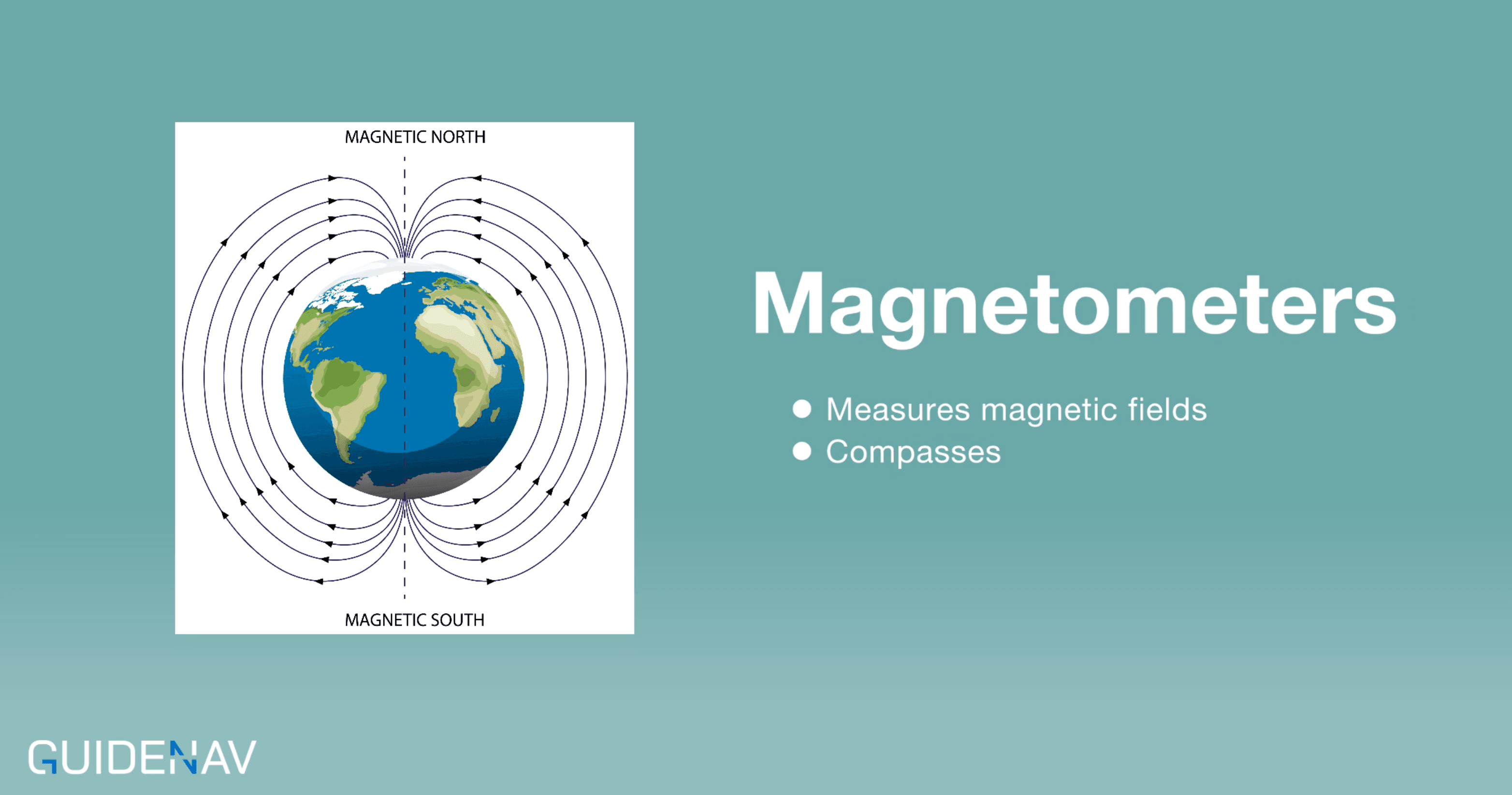
Magnétomètre IMU : que mesure un magnétomètre ?
Enfin, le magnétomètre mesure le champ magnétique environnant l'appareil, ce qui permet généralement de déterminer le cap ou la direction par rapport au champ magnétique terrestre. On peut le comparer à une boussole électronique. Tandis que les gyroscopes et les accéléromètres aident à suivre les mouvements, le magnétomètre améliore la précision de l'orientation en fournissant des informations sur le cap par rapport au nord magnétique.
J'ai constaté que le magnétomètre est particulièrement important dans les situations où le signal GPS est faible ou inexistant. Par exemple, en milieu urbain dense, sous terre ou sous l'eau, s'orienter avec précision est crucial, et le magnétomètre vous assure de ne jamais vous perdre
Quelles sont les applications courantes des centrales inertielles (IMU) ?
Les centrales inertielles (IMU) ne se limitent pas à un seul domaine : elles sont utilisées dans un large éventail d’industries. Leur polyvalence est l’une des principales raisons de leur rôle essentiel dans les technologies modernes. Au cours des 20 dernières années, j’ai vu des IMU employées dans des secteurs aussi variés que l’ aérospatiale , l’ automobile, l’électronique grand public , la robotique et la défense . Voici leur impact sur chaque secteur :
Défense/Militaire
C'est dans ce secteur que les centrales inertielles (IMU) démontrent toute leur utilité. Dans les applications de défense et militaires, la précision de la navigation et la stabilité sont des impératifs. Des systèmes de guidage de missiles aux drones , en passant par les dispositifs portés par les soldats , les IMU jouent un rôle essentiel pour garantir le bon déroulement des opérations.
J'ai participé à plusieurs projets liés à la défense et je peux vous assurer, par expérience, que les centrales inertielles sont essentielles dans les environnements où l'échec est inacceptable. Par exemple, dans les systèmes de missiles, la centrale inertielle fournit un retour d'information en temps réel sur la vitesse et la rotation, garantissant ainsi la précision du tir. Dans les drones, où les signaux GPS peuvent être instables ou brouillés, les centrales inertielles assurent la navigation inertielle nécessaire au maintien du cap.
Même au niveau du soldat, les centrales inertielles (IMU) sont intégrées aux dispositifs tactiques pour suivre les mouvements et la position en l'absence de GPS, contribuant ainsi à une meilleure connaissance de la situation en terrains complexes comme les environnements urbains denses ou souterrains. Les IMU sont un élément clé de la dépendance croissante de la guerre moderne aux systèmes autonomes et semi-autonomes.
Aérospatial

Dans le secteur aérospatial, l'importance des centrales inertielles (IMU) est capitale. Qu'il s'agisse d'avions, de vaisseaux spatiaux ou de drones, les IMU fournissent les données essentielles à la navigation, au contrôle et à la stabilité. Elles constituent l'épine dorsale des systèmes de pilotage automatique, garantissant des trajectoires de vol fluides et des atterrissages précis.
Lorsque je travaille avec des clients du secteur aérospatial, ils exigent souvent des centrales inertielles (IMU) hautes performances capables de fonctionner dans des environnements extrêmes, comme les hautes altitudes ou même l'espace. L'IMU maintient l'aéronef sur sa trajectoire, en compensant les turbulences, les cisaillements de vent et autres forces extérieures. Dans l'exploration spatiale, les IMU sont essentielles pour maintenir l'orientation des satellites et des rovers, en l'absence de GPS.
Automobile

Avec l'essor des véhicules autonomes, les centrales inertielles (IMU) sont devenues indispensables dans l'industrie automobile. Les voitures autonomes s'appuient sur les IMU pour déterminer leur position et leurs mouvements sans intervention humaine. L'IMU permet au véhicule de prendre des décisions cruciales en temps réel, qu'il s'agisse de détecter le moment opportun pour ralentir ou d'aborder un virage serré en toute sécurité.
Dans le développement des systèmes avancés d'aide à la conduite (ADAS) , les centrales inertielles (IMU) jouent un rôle essentiel en fournissant des données aux systèmes embarqués. J'ai pu observer leur utilisation dans le contrôle de stabilité, où elles contribuent à détecter et à corriger le survirage ou le sous-virage, ainsi que dans les systèmes de freinage automatique, où une décélération rapide est cruciale pour éviter les accidents.
Électronique grand public

Dans l'électronique grand public, les centrales inertielles (IMU) sont plus discrètes, mais tout aussi essentielles. Elles sont présentes dans votre smartphone, assurant une rotation d'écran fluide ou permettant le fonctionnement de jeux basés sur les mouvements. Dans les bracelets connectés et les montres intelligentes, les IMU suivent les mouvements, surveillent l'activité et calculent le nombre de pas ou les calories brûlées.
Dans plusieurs projets liés aux technologies portables, j'ai pu constater directement à quel point une centrale inertielle (IMU) améliore l'expérience utilisateur. Les capteurs intégrés aux appareils de fitness utilisent des accéléromètres et des gyroscopes pour enregistrer les mouvements avec précision, qu'il s'agisse de marche, de course ou même de natation. Les IMU garantissent le bon fonctionnement de ces appareils et fournissent aux utilisateurs des données précises dont ils ont besoin au quotidien.
Robotique
Les robots, qu'ils soient industriels ou autonomes, dépendent fortement des centrales inertielles (IMU) pour une navigation et un contrôle précis. Dans le secteur industriel, les IMU permettent aux robots de se déplacer avec précision sur les chaînes de montage, en manipulant des pièces délicates avec une extrême exactitude. Pour les robots autonomes, qu'ils se déplacent dans un entrepôt ou explorent des zones sinistrées, les IMU garantissent leur équilibre et le maintien de leur trajectoire.
J'ai travaillé sur plusieurs systèmes robotiques autonomes où les centrales inertielles étaient essentielles à l'équilibre et au déplacement. Sans elles, ces systèmes manqueraient de la précision requise pour des tâches critiques comme la navigation sur terrain accidenté, ce qui les rendrait beaucoup moins efficaces et fiables.
Pourquoi l'IMU est-elle importante dans les systèmes de navigation et de positionnement ?
Dans tout système exigeant une navigation ou un positionnement précis, l'IMU est un outil indispensable. Au fil des ans, j'ai pu constater le rôle crucial que jouent les IMU pour maintenir le cap de tous types d'engins, des drones aux sous-marins. Leur principal atout réside dans leur capacité à mesurer les mouvements sans recourir à des références externes .
Environnements sans GPS
L'un des aspects les plus importants d'une centrale inertielle (IMU) est sa capacité à fonctionner dans des environnements sans GPS . Que ce soit en eaux profondes, sous terre ou dans une zone urbaine dense où les signaux GPS sont peu fiables, une IMU peut suivre les mouvements avec une précision remarquable. J'ai vu des systèmes fonctionner parfaitement dans ces environnements grâce à l'IMU, qui mesure en continu les variations de vitesse et d'orientation.
Dans le secteur aérospatial, notamment pour les drones militaires, se fier uniquement au GPS peut s'avérer risqué. Les centrales inertielles (IMU) offrent une fiabilité accrue en assurant une navigation inertielle lorsque les signaux GPS sont perdus ou brouillés. Cette redondance est essentielle pour les applications civiles et militaires.
Positionnement et stabilisation
La stabilisation est un autre domaine où les centrales inertielles (IMU) excellent. De nombreux systèmes, notamment dans les secteurs aérospatial et maritime, nécessitent des ajustements en temps réel pour maintenir leur stabilité. Qu'il s'agisse de stabiliser un drone en vol ou de garantir la stabilité d'une nacelle de caméra lors de la prise de vue, les IMU constituent la technologie sous-jacente qui rend tout cela possible.
Nous avons utilisé des centrales inertielles (IMU) dans de nombreux systèmes où les corrections en temps réel sont essentielles. Par exemple, dans les hélicoptères ou les avions, les IMU fournissent en permanence des informations au pilote automatique, permettant d'effectuer des micro-ajustements pour compenser les rafales de vent ou les turbulences.
Précision et autonomie
Dans les systèmes autonomes, comme les voitures ou les robots autonomes, la précision de la navigation est primordiale. Les centrales inertielles (IMU) permettent à ces systèmes de déterminer leur orientation, leur vitesse et leur trajectoire, même dans des conditions extérieures difficiles. En fournissant des données aux algorithmes de contrôle, l'IMU permet à ces machines de « savoir » exactement où elles se trouvent et où elles vont. Cette perception en temps réel est la clé d'une véritable autonomie.
Dans le cadre de nos travaux sur les systèmes autonomes, notamment les drones, nous avons constaté comment les centrales inertielles (IMU) contribuent à calculer précisément la position au fil du temps. Associées aux technologies de fusion de données de capteurs, les IMU permettent à ces systèmes d'ajuster leur trajectoire et de la maintenir sans intervention humaine.
À quoi ressemble une centrale inertielle (IMU) ?

Une centrale inertielle (IMU) est généralement un appareil compact intégrant plusieurs capteurs pour mesurer l'accélération, la vitesse angulaire et parfois les champs magnétiques d'un objet. Bien que son apparence puisse varier selon le fabricant, le modèle et l'utilisation prévue, la plupart des centrales inertielles partagent certaines caractéristiques générales.
Voici une description de ce à quoi ressemble généralement une centrale inertielle (IMU) :
1. Taille et forme
La plupart des centrales inertielles (IMU) sont relativement petites et souvent de forme rectangulaire ou parallélépipédique. Leurs dimensions varient selon la précision et l'application, mais une IMU courante utilisée en électronique grand public a généralement la taille d'une petite pièce de monnaie ou d'une boîte d'allumettes épaisse. Les IMU industrielles ou aérospatiales peuvent être plus volumineuses, atteignant parfois la taille d'un petit ordinateur portable ou d'un disque dur, selon la complexité du système.
2. Logement extérieur
Les centrales inertielles (IMU) sont généralement logées dans des boîtiers robustes, souvent étanches, afin de protéger les capteurs internes des facteurs environnementaux tels que l'humidité, la poussière ou les chocs. Le matériau du boîtier est généralement un alliage métallique ou un plastique haute résistance, garantissant sa durabilité dans des conditions extrêmes (par exemple, applications aérospatiales et militaires).
- Les centrales inertielles industrielles et aérospatiales peuvent être dotées d'un boîtier métallique plus robuste pour résister aux conditions extrêmes.
- Les IMU grand public (utilisées dans des appareils comme les smartphones ou les drones) sont généralement logées dans des boîtiers en plastique plus légers.
3. Connecteurs et ports
Les centrales inertielles (IMU) comportent généralement des connecteurs pour l'alimentation, la sortie de données et parfois des interfaces de communication (par exemple, UART, I2C, SPI ou RS-232). Ces connecteurs permettent à l'IMU de communiquer avec d'autres systèmes, qu'il s'agisse du contrôleur de vol d'un drone, d'un robot ou du système de navigation d'un aéronef.
- Pour les systèmes plus complexes, plusieurs ports pour différents signaux peuvent être visibles.
- Dans certains cas, on utilise des IMU sans fil
4. Placement des capteurs
Les composants internes d'une centrale inertielle (IMU) — accéléromètres, gyroscopes et magnétomètres — sont généralement intégrés au boîtier. Si vous observiez une IMU au microscope ou sur un schéma détaillé, vous verriez de minuscules puces de capteurs (MEMS ou dispositifs piézoélectriques) intégrées à l'appareil.
Types de capteurs dans une centrale inertielle
En matière d'unités de mesure inertielle (IMU), ce sont les capteurs internes qui déterminent leurs performances. Au fil des années, plusieurs types de capteurs ont été utilisés dans les IMU, mais MEMS et FOG se distinguent par leur large éventail d'applications dans divers secteurs. Chaque type de capteur présente ses propres avantages et inconvénients, selon l'application et l'environnement d'utilisation. Ci-dessous, je détaillerai les IMU MEMS et les IMU FOG , puis je comparerai leurs performances, leur coût et leur fiabilité.
MEMS IMU : Aperçu des MEMS IMU et de leurs applications
Les systèmes microélectromécaniques, ou centrales inertielles MEMS , ont révolutionné le monde des capteurs. Grâce à l'utilisation de minuscules composants mécaniques sur des puces de silicium, la technologie MEMS permet de créer des centrales inertielles hautement intégrées, combinant accéléromètres , gyroscopes et parfois magnétomètres dans un format compact et abordable. C'est pourquoi on trouve aujourd'hui des centrales inertielles MEMS dans presque tous les appareils grand public, des smartphones aux traqueurs d'activité. Elles sont devenues si omniprésentes qu'il est difficile d'imaginer l'électronique moderne sans elles.
Les capteurs MEMS sont populaires car ils offrent un bon compromis entre performance, taille et coût. Compacts et économes en énergie, ils sont idéaux pour les appareils où l'espace est limité. J'ai travaillé sur plusieurs projets utilisant des centrales inertielles MEMS dans l'électronique grand public , les technologies portables et les systèmes automobiles – des domaines où une bonne précision est nécessaire, sans pour autant exiger la plus haute précision disponible sur le marché.
Cependant, les centrales inertielles MEMS présentent des limitations. Bien qu'efficaces pour de nombreuses applications, elles ont tendance à dériver avec le temps et peuvent être affectées par des conditions environnementales telles que les variations de température. Par exemple, dans les systèmes de sécurité automobile , les centrales inertielles MEMS fonctionnent bien pour des tâches de courte durée comme la détection de virages serrés ou d'arrêts brusques, mais elles peuvent rencontrer des difficultés dans des environnements plus exigeants comme l'aérospatiale, où la précision sur de longues périodes est cruciale. C'est là que l'on se tourne vers d'autres technologies, telles que les centrales inertielles FOG, lorsqu'une précision accrue est nécessaire.
FOG IMU : centrale inertielle gyroscopique à fibre optique – Cas d’utilisation dans les applications de haute précision
Lorsque les performances et la précision des MEMS requièrent des solutions supérieures, les gyroscopes à fibre optique (FOG) entrent en jeu. Les centrales inertielles FOG sont fréquemment utilisées dans l'aérospatiale , la défense et d'autres secteurs où la moindre erreur de mesure peut avoir des conséquences majeures. Ces capteurs sont reconnus pour leur haute précision et leur stabilité à long terme, des caractéristiques essentielles dans les environnements où des forces externes telles que les vibrations ou les variations de température peuvent fortement impacter leurs performances.
Contrairement aux MEMS, les centrales inertielles à gyroscope à fibre optique (FOG) exploitent les propriétés de la lumière pour détecter les variations de vitesse angulaire. Un faisceau lumineux traverse des bobines de fibre optique et, lorsque la centrale tourne, son trajet est modifié, ce qui permet au système de mesurer la rotation avec une précision remarquable. Le principal avantage de la technologie FOG réside dans l'absence de pièces mobiles. De ce fait, le nombre de composants susceptibles de s'user est réduit, ce qui explique la grande fiabilité et la durée de vie généralement supérieure des centrales inertielles FOG par rapport aux systèmes à base de MEMS.
centrales inertielles à gyroscope ( FOG IMU) sont idéales pour les systèmes de guidage de missiles , et même la navigation par satellite . Dans le cadre de mon expérience sur des projets aérospatiaux de haute précision, nous privilégions souvent les FOG IMU lorsqu'un système doit fonctionner parfaitement en l'absence de signal GPS ou dans des conditions extrêmes. Leur prix est certes plus élevé, mais pour les applications critiques où la moindre défaillance est inacceptable, leur coût est largement justifié.
Gyroscopes MEMS et FOG – Une brève comparaison
Comparons maintenant MEMS et FOG . J'ai eu l'occasion de travailler avec ces deux technologies au fil des ans, et il est clair que chacune a son utilité selon l'application.
- Précision : C’est là que les gyroscopes à fibre optique (FOG) excellent. Ils sont bien plus précis, notamment sur de longues durées. Leur dérive minimale les rend idéaux pour les applications exigeant une précision élevée et constante, comme dans l’aérospatiale ou la défense. À l’inverse, les gyroscopes MEMS offrent une bonne précision, mais peuvent dériver avec le temps, ce qui implique un recalibrage plus fréquent pour les tâches de haute précision.
- Taille et coût : Les centrales inertielles MEMS sont bien plus compactes et économiques que les centrales inertielles FOG. Elles constituent donc le choix idéal pour l’électronique grand public, l’automobile et d’autres applications commerciales où la taille et le budget sont des facteurs essentiels. Les systèmes FOG, bien que plus coûteux et plus encombrants, sont privilégiés lorsque la précision absolue est requise et que les performances ne peuvent être compromises.
- Durabilité : En termes de robustesse, les systèmes FOG présentent un avantage certain, notamment en environnements difficiles. Dépourvus de pièces mobiles, ils sont moins sujets à l’usure, ce qui les rend parfaitement adaptés aux déploiements de longue durée dans des conditions extrêmes. Les MEMS, avec leurs composants mécaniques, sont suffisamment durables pour la plupart des applications grand public et industrielles, mais ont tendance à se dégrader plus rapidement dans des conditions extrêmes.
- Consommation d'énergie : Les centrales inertielles MEMS sont plus économes en énergie, ce qui explique leur présence fréquente dans les appareils électroniques portables tels que les smartphones et les traqueurs d'activité. Les centrales inertielles FOG, quant à elles, consomment davantage d'énergie en raison des systèmes optiques qu'elles utilisent, ce qui les rend moins adaptées aux applications basse consommation, mais parfaitement acceptables dans des secteurs comme l'aérospatiale ou la défense, où la consommation d'énergie est moins limitée.
Explication des spécifications de performance de l'IMU
Lorsqu'il s'agit de choisir la centrale inertielle (IMU) adaptée à une application donnée, il est essentiel de bien comprendre ses spécifications de performance. Ces spécifications déterminent le fonctionnement optimal de l'IMU en conditions réelles, notamment lorsque la précision et la stabilité sont des critères essentiels. Au fil des années, nous avons constaté que certains facteurs de performance, tels que l'instabilité du biais ou la densité de bruit, peuvent être déterminants pour la réussite d'un projet, en particulier dans des secteurs comme l'aérospatiale, la défense et la robotique de haute précision. Examinons en détail certaines des spécifications clés qui doivent être évaluées avec soin.
1. Instabilité de biais
L'instabilité de biais est un facteur souvent négligé, mais qui a un impact significatif dans les applications de haute précision . Elle correspond aux petites variations aléatoires de la mesure du capteur lorsqu'elle devrait indiquer zéro. En d'autres termes, il s'agit de la « dérive » de l'IMU à l'arrêt.
En pratique, l'instabilité du biais est cruciale car elle influe sur la capacité du système à maintenir sa précision dans le temps. Prenons l'exemple d'un système de guidage de missile ou d'un satellite en orbite. Ces deux systèmes reposent sur des données extrêmement précises sur de longues périodes. Toute dérive due à l'instabilité du biais peut engendrer des erreurs cumulatives importantes, voire une déviation du système de sa trajectoire. C'est pourquoi, lorsque nous collaborons avec des clients du secteur aérospatial, nous accordons une importance capitale à une faible instabilité du biais, notamment pour les missions de longue durée où même les plus petites erreurs peuvent avoir des conséquences considérables.
2. Biais initial
Le biais initial est un autre facteur critique qui affecte directement la précision à long terme d'une centrale inertielle. Il s'agit de l'erreur de décalage du capteur au moment du démarrage. En d'autres termes, c'est l'erreur de base qui existe avant même le début des mesures. Si le biais initial est trop important, il affectera la précision de toutes les mesures suivantes, rendant ainsi l'ensemble du système sujet aux erreurs.
Ceci est particulièrement important pour les applications où l'IMU doit fonctionner pendant de longues périodes sans recalibrage. Dans les systèmes tels que les véhicules autonomes ou les drones, l'IMU doit fournir des données précises tout au long de son fonctionnement. Même un faible biais initial peut entraîner des erreurs importantes au fil du temps s'il n'est pas corrigé. C'est pourquoi, dans les systèmes de haute précision, nous recommandons systématiquement de calibrer l'IMU au démarrage afin de corriger le biais initial avant qu'il ne devienne problématique.
3. Portée et résolution
Lors du choix d'une centrale inertielle (IMU), la plage de mesure et la résolution sont deux spécifications qui doivent toujours être considérées conjointement. La plage de mesure définit l'accélération ou la vitesse angulaire maximale mesurable, tandis que la résolution correspond à la plus petite variation que le capteur peut détecter.
Si vous travaillez sur un projet où l'IMU sera soumise à des contraintes importantes, comme dans un système de détection de collision automobile ou des applications aérospatiales à grande vitesse, un capteur à large plage de mesure est essentiel. Le système doit pouvoir supporter des conditions extrêmes sans saturer le capteur. En revanche, si l'IMU est utilisée dans des équipements de précision, tels que des robots chirurgicaux ou des drones, une haute résolution est nécessaire pour détecter les moindres variations de mouvement.
Il est souvent nécessaire de trouver le juste équilibre entre la plage dynamique et la résolution, selon l'application. Dans certains cas, une plage dynamique plus étendue sacrifie la résolution, ce qui peut entraîner la perte de détails fins. Cependant, pour certains projets où la précision est primordiale, nous privilégions une résolution plus élevée, même si cela implique de travailler avec une plage dynamique plus restreinte.
4. Facteur d'échelle et erreur d'échelle
Le facteur d'échelle correspond au rapport entre la sortie de l'IMU et l'entrée physique réelle. Idéalement, ce rapport devrait être parfait, mais en réalité, chaque capteur présente une erreur d'échelle , qui représente l'écart par rapport à ce rapport idéal.
Pourquoi est-ce important ? Parce que le facteur d'échelle influe directement sur la précision des mesures . Lorsque l'erreur d'échelle est trop importante, elle fausse les relevés, ce qui entraîne l'envoi de données inexactes au système. Par exemple, dans le système de pilotage automatique d'un drone, si le facteur d'échelle est incorrect, le système peut croire que le drone vole à l'horizontale alors qu'en réalité, il s'incline lentement sur le côté. Avec le temps, ces erreurs s'accumulent et le drone dévie de sa trajectoire.
Lors du développement de systèmes où la précision est primordiale, nous veillons à ce que les centrales inertielles choisies présentent une faible erreur d'échelle et une grande stabilité du facteur d'échelle. Ainsi, nous avons la certitude que les mesures sur lesquelles nous nous appuyons sont précises et cohérentes, même sur de longues périodes de fonctionnement.
5. Bruit et densité du bruit
Le bruit est une caractéristique inhérente à tout capteur, et les centrales inertielles (IMU) ne font pas exception. Il désigne les fluctuations aléatoires du signal de sortie du capteur qui peuvent masquer le signal réel. La densité de bruit mesure le niveau de ce bruit sur une bande passante spécifique.
Dans les applications de haute précision, comme la robotique ou la navigation par satellite, la réduction du bruit est essentielle. Un niveau de bruit trop élevé rend difficile la distinction entre les petits mouvements réels et les fluctuations aléatoires des données. C'est là que la densité de bruit devient une spécification clé, notamment dans les environnements dynamiques où les mouvements subtils doivent être capturés avec précision.
Par exemple, dans les robots chirurgicaux qui exigent une précision submillimétrique, un niveau de bruit élevé peut engendrer des erreurs compromettant l'ensemble de l'opération. L'expérience nous a appris que même un bruit apparemment infime peut avoir des conséquences importantes lorsque la précision est cruciale. Choisir une centrale inertielle (IMU) à faible densité de bruit garantit que le capteur puisse détecter les variations les plus infimes sans interférence.
6. Bande passante et fréquence d'échantillonnage
La bande passante désigne la plage de fréquences qu'une centrale inertielle (IMU) peut mesurer avec précision, tandis que la fréquence d'échantillonnage correspond à la fréquence à laquelle l'IMU effectue des mesures. Ensemble, ces paramètres déterminent la capacité du capteur à capturer des événements dynamiques et rapides.
Pour les applications à haute vitesse — comme les drones ou les véhicules autonomes évoluant dans des environnements complexes —, des fréquences d'échantillonnage élevées et une large bande passante sont essentielles. Une faible fréquence d'échantillonnage risque de ne pas détecter des détails critiques dans des situations rapides, entraînant des réponses tardives ou erronées du système. Imaginez une voiture autonome qui ne détecte pas un virage brusque à cause d'une faible fréquence d'échantillonnage : les conséquences pourraient être catastrophiques.
En revanche, pour des applications moins dynamiques, comme la surveillance de l'intégrité structurelle, la bande passante et la fréquence d'échantillonnage n'ont pas besoin d'être aussi élevées. L'essentiel est d'adapter les spécifications de l'IMU aux exigences opérationnelles du système. Nous avons souvent constaté qu'une fréquence d'échantillonnage trop faible entraîne la perte de détails, tandis qu'une fréquence trop élevée peut saturer le système de données inutiles. Trouver le juste équilibre est donc crucial.
7. Marche aléatoire
La marche aléatoire décrit les petites erreurs aléatoires qui s'accumulent au fil du temps dans le signal de sortie de l'IMU. Même si chaque erreur peut sembler insignifiante prise individuellement, leur accumulation peut entraîner une dérive du système par rapport à sa position ou orientation réelle.
Lors de missions de longue durée, comme celles impliquant des drones ou des satellites , la marche aléatoire peut engendrer des erreurs de positionnement importantes. J'ai constaté des cas où une faible marche aléatoire dans un capteur IMU a provoqué une dérive considérable des systèmes de navigation après seulement quelques heures de fonctionnement. Dans ce type de projets, le choix d'une IMU à faible marche aléatoire est crucial pour garantir une précision optimale sur le long terme.
La dérive aléatoire devient particulièrement problématique dans les environnements sans GPS, où l'IMU ne peut s'appuyer sur des références externes pour corriger sa dérive. C'est pourquoi nous recommandons systématiquement de tester et d'évaluer les performances de l'IMU en matière de dérive aléatoire avant son déploiement dans un système de haute précision et de longue durée.
Comment choisir la centrale inertielle adaptée à votre application
Choisir la bonne centrale inertielle (IMU) peut s'avérer complexe. Au fil des ans, nous avons constaté que le choix d'une IMU inadaptée pouvait entraîner des retards importants, des dépassements de coûts, voire l'échec d'un projet. La clé réside dans la compréhension des besoins spécifiques de votre application et leur adéquation aux spécifications de performance de l'IMU. Il n'existe pas d'IMU universelle : chaque projet exige une analyse approfondie de plusieurs facteurs. Examinons ensemble les éléments à prendre en compte pour choisir l'IMU la mieux adaptée à vos besoins.
Facteurs à prendre en compte : spécifications de performance, environnement, taille, coût
La première chose que nous examinons systématiquement, ce sont les spécifications de performance . Toutes les centrales inertielles (IMU) ne se valent pas, et il est essentiel de bien comprendre leurs spécifications pour s'assurer qu'elles répondent aux exigences de votre projet. Des caractéristiques clés telles que la stabilité du biais , la densité de bruit , la fréquence d'échantillonnage et la plage de mesure doivent correspondre aux besoins de votre application. Par exemple, pour un projet aérospatial de haute précision , vous aurez besoin d'une IMU présentant une dérive de biais minimale et une grande stabilité. En revanche, si l'IMU est destinée à un appareil électronique grand public, vous pourriez privilégier le coût et la taille à une précision extrême.
L' environnement dans lequel l'IMU fonctionnera est tout aussi important. Sera-t-elle exposée à des températures extrêmes, à des vibrations ou à l'humidité ? Dans les applications de défense ou aérospatiales, où l'IMU peut être utilisée dans des environnements difficiles ou imprévisibles, la robustesse devient un facteur clé. Les IMU renforcées sont conçues pour résister à ces conditions, mais elles sont plus coûteuses et plus encombrantes. En revanche, pour des environnements plus contrôlés, comme à l'intérieur d'une usine ou d'un appareil grand public, il est possible d'utiliser une IMU plus légère et moins chère sans compromettre les performances.
La taille et le coût sont également des facteurs cruciaux, notamment pour les applications compactes ou à faible coût. Par exemple, si vous développez un dispositif portable ou un drone compact, la taille et la consommation énergétique de l'IMU sont des critères essentiels. Nous avons travaillé sur de nombreux projets où les contraintes d'espace étaient impératives et où le choix d'une IMU MEMS plus petite s'est avéré judicieux. Cependant, il faut garder à l'esprit que les IMU plus petites et moins chères se font souvent au détriment des performances, en particulier en termes de stabilité à long terme et de précision.
Le coût est également un facteur important. Si les centrales inertielles à gyroscope à fibre optique (FOG) haut de gamme offrent une précision inégalée, elles sont bien plus onéreuses que les systèmes MEMS. Il est donc essentiel de bien comprendre le compromis entre coût et performance . Si votre application tolère une certaine dérive ou nécessite un réétalonnage périodique, une centrale inertielle MEMS moins coûteuse peut suffire. En revanche, pour un système de guidage de missile ou un satellite, par exemple, il est indispensable d'investir dans la centrale inertielle la plus performante possible, en fonction de votre budget.
Comprendre les exigences de votre application
Avant toute décision, nous vous conseillons d'analyser en détail les exigences spécifiques de votre application . Chaque secteur et cas d'utilisation présente ses propres exigences, et l'IMU doit être choisie en conséquence. Voici un aperçu des critères à prendre en compte dans différents secteurs :
- Applications industrielles : En milieu industriel, la robustesse et la durabilité sont souvent essentielles. Les centrales inertielles (IMU) utilisées dans les machines, la production ou les équipements lourds doivent résister aux vibrations, à la poussière et à de larges variations de température. Il est également important qu'elles fournissent des données en temps réel avec une grande précision afin d'améliorer les systèmes d'automatisation et de contrôle. Nous avons constaté que, pour la plupart des projets industriels, une centrale inertielle MEMS de milieu de gamme offre généralement le meilleur compromis entre durabilité et performance.
- Électronique grand public : Pour les appareils grand public tels que les smartphones, les traqueurs d’activité ou les casques de réalité virtuelle, l’accent est généralement mis sur le coût, la taille et la consommation d’énergie . Ces applications n’exigent pas une précision de niveau militaire, mais nécessitent des centrales inertielles (IMU) compactes et basse consommation, capables de performances constantes. Les IMU MEMS dominent ce marché grâce à leur faible coût et leur efficacité énergétique, ce qui les rend idéales pour les appareils alimentés par batterie. Forts de notre expérience auprès de nombreux fabricants de ce secteur, nous pouvons affirmer avec certitude que, pour la plupart des appareils électroniques grand public, les principaux défis résident dans la gestion de l’énergie et l’intégration, et non pas nécessairement dans une précision extrême.
- Automobile : Dans le secteur automobile, les centrales inertielles (IMU) jouent un rôle de plus en plus crucial pour les systèmes avancés d’aide à la conduite (ADAS) et les véhicules autonomes. La précision et la fiabilité sont primordiales, tout comme la rentabilité, compte tenu de l’ampleur du marché. Pour ces applications, il est indispensable de disposer d’une IMU capable de résister aux variations de température et aux vibrations de la route, tout en fournissant des données stables et en temps réel. Nous recommandons souvent les IMU MEMS de qualité automobile, spécialement conçues pour ces conditions, offrant un excellent compromis entre coût et fiabilité.
- Aérospatiale et Défense : Dans les secteurs de l'aérospatiale et de la défense, la moindre erreur est inacceptable. Qu'il s'agisse de guider un missile, de stabiliser un satellite ou de piloter un drone en environnement sans GPS, il est indispensable de disposer IMU) hautes performances capables de fournir des données avec une dérive minimale sur de longues périodes. Les IMU à gyroscope à fibre optique (FOG) ou à gyroscope laser annulaire (RLG) sont généralement utilisées dans ces applications pour leur précision et leur stabilité à long terme. Bien que plus coûteux et plus encombrants, ces systèmes représentent un investissement judicieux dans les environnements critiques.
Erreurs courantes à éviter lors du choix d'une centrale inertielle
Au fil des ans, nous avons constaté des erreurs fréquentes lors du choix d'une centrale inertielle. Éviter ces pièges permet de gagner du temps et de l'argent à long terme.
- Surdimensionnement ou sous-dimensionnement de l'IMU : L'un des problèmes les plus fréquents que nous rencontrons est la tendance à surdimensionner ou sous-dimensionner l'IMU pour un projet. Certaines équipes optent pour l'IMU haut de gamme du marché, pensant qu'elle répondra à tous les besoins, mais cela entraîne souvent des coûts et une complexité inutiles. À l'inverse, choisir l'option la moins chère peut engendrer des problèmes de performance, notamment dans les environnements exigeants. Il est essentiel d'équilibrer les spécifications de l'IMU avec les besoins réels de l'application, plutôt que d'opter pour des solutions extrêmes.
- Négliger les facteurs environnementaux : des projets ont échoué car les équipes n’ont pas tenu compte de l’environnement d’exploitation. Les centrales inertielles (IMU) sont sensibles aux variations de température, aux vibrations et autres conditions externes. Choisir une IMU non adaptée à votre environnement spécifique peut entraîner une dérive d’étalonnage, une panne ou des données inexactes. Assurez-vous toujours que l’IMU est conçue pour résister aux conditions réelles d’utilisation.
- Négliger l'évolutivité future : Il est facile de se concentrer sur les besoins immédiats d'un projet, mais si l'application fait partie d'un système ou d'une gamme de produits plus vaste, l'évolutivité doit être prise en compte. Que vous envisagiez de réaliser des tâches de plus haute précision ou de vous intégrer à des systèmes de contrôle plus avancés, choisir une centrale inertielle capable d'évoluer en fonction des besoins futurs vous permettra de gagner du temps et des ressources par la suite.
- Négliger les exigences de traitement des données : Une erreur fréquente consiste à ne pas prendre en compte la charge de calcul nécessaire au traitement des données de l’IMU. Les IMU hautes performances génèrent une quantité importante de données qui doivent être traitées en temps réel. Si les ressources de calcul du système ne sont pas adaptées, le plein potentiel de l’IMU ne sera pas exploité. Assurez-vous que votre application dispose de la puissance de traitement et des algorithmes nécessaires pour gérer les données entrantes.