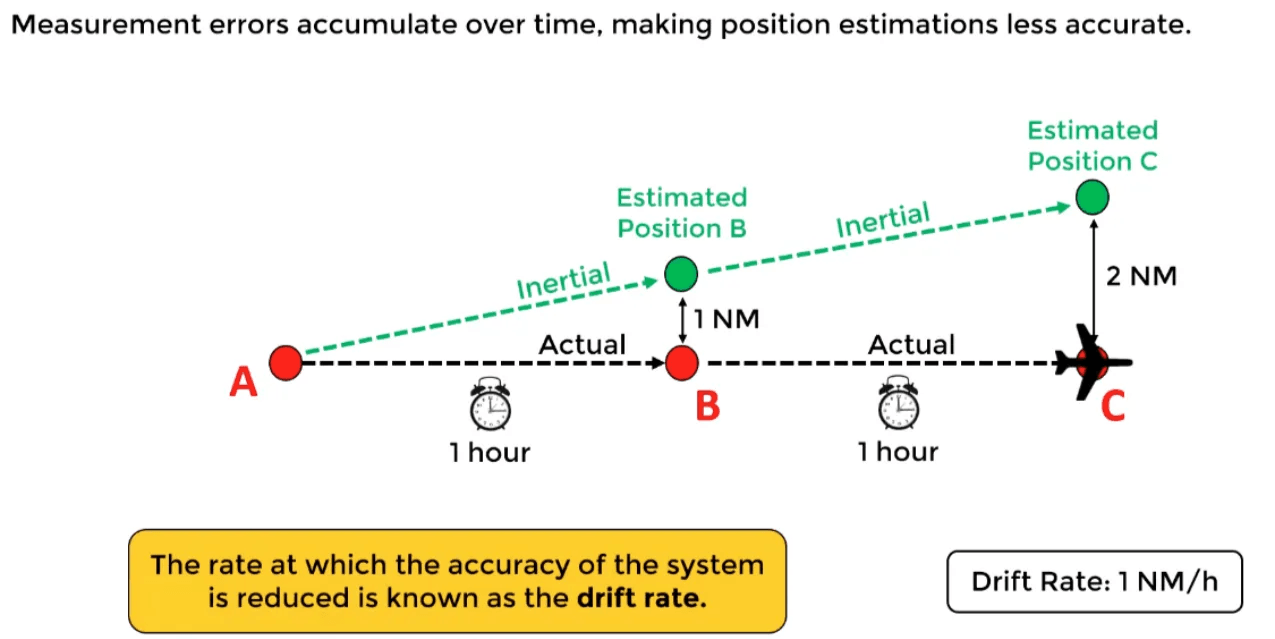
Dans le contexte des systèmes de navigation inertielle (INS) , la dérive fait référence à l'accumulation progressive d'erreurs au fil du temps, ce qui entraîne une diminution progressive de la précision des mesures du système (comme la position, la vitesse ou le cap).
Voici comment ça fonctionne :
- Absence de correction externe : En navigation inertielle, des capteurs comme les accéléromètres et les gyroscopes servent à calculer la position et la direction. Cependant, ces capteurs ne sont pas parfaits et leurs petites erreurs peuvent s’accumuler avec le temps.
- Les petites erreurs s'accumulent : même une minuscule erreur de mesure (comme un léger décalage de position ou une petite erreur de rotation) peut s'amplifier avec le temps, entraînant une dérive du système par rapport à la valeur réelle.
Pourquoi c'est important :
La dérive est un problème courant pour les systèmes de navigation inertielle (INS), car elle entraîne une augmentation des erreurs au fil du temps. Sans corrections externes (comme le GPS), la dérive peut conduire à des résultats inexacts après un certain temps, affectant ainsi la précision globale du système de navigation.