Table des matières
- Qu'est-ce qu'une centrale inertielle (IMU) ?
- Composants d'une centrale inertielle
- Comment fonctionne une centrale inertielle ?
- Véhicules autonomes et sans conducteur
- Aérospatiale et aviation
- Robotique
- Réalité virtuelle (RV) et réalité augmentée (RA)
- Dispositifs médicaux
- Analyse sportive et capture de mouvement
- Électronique grand public
- MEMS IMU vs FOG IMU : Principales différences
- MEMS IMU : Aperçu et caractéristiques
- IMU FOG : Aperçu et caractéristiques
- Indicateurs de performance de l'IMU
- Méthodes d'étalonnage des IMU
- Avantages des centrales inertielles
- Limites des centrales inertielles
- IMU vs AHRS (Système de référence d'attitude et de cap)
- IMU vs INS (Système de navigation inertielle)
- Différents types d'IMU et aperçu du marché
- Tendances futures et développement des centrales inertielles
Introduction
Les centrales inertielles (IMU) sont essentielles dans les industries de pointe actuelles, notamment les véhicules autonomes, la robotique et l'aérospatiale. Cependant, malgré leur utilisation répandue, beaucoup peinent encore à comprendre pleinement leur fonctionnement et leur potentiel. Sans cette compréhension, le risque d'inefficacités et d'erreurs dans les performances du système est important. Cet article explore les principes fondamentaux des IMU, leurs applications et les tendances futures, afin de vous permettre d'exploiter au mieux cette technologie.
Une centrale inertielle (IMU) est un dispositif qui mesure l'accélération, la vitesse angulaire et parfois les champs magnétiques afin de déterminer l'orientation et la position d'un objet. Les IMU sont essentielles à la navigation, aux systèmes de contrôle et au suivi de mouvement. En combinant les données de différents capteurs, elles permettent un suivi précis du mouvement et de l'orientation, même dans des environnements où le signal GPS est faible ou indisponible.
L'avenir des centrales inertielles est prometteur, avec des tendances telles que la fusion de capteurs et l'intégration de l'IA qui ouvrent de nouvelles perspectives. Examinons de plus près le fonctionnement de ces systèmes et leur rôle futur dans les technologies de pointe.
Principes de base de l'unité de mesure inertielle (IMU)
Composants d'une centrale inertielle
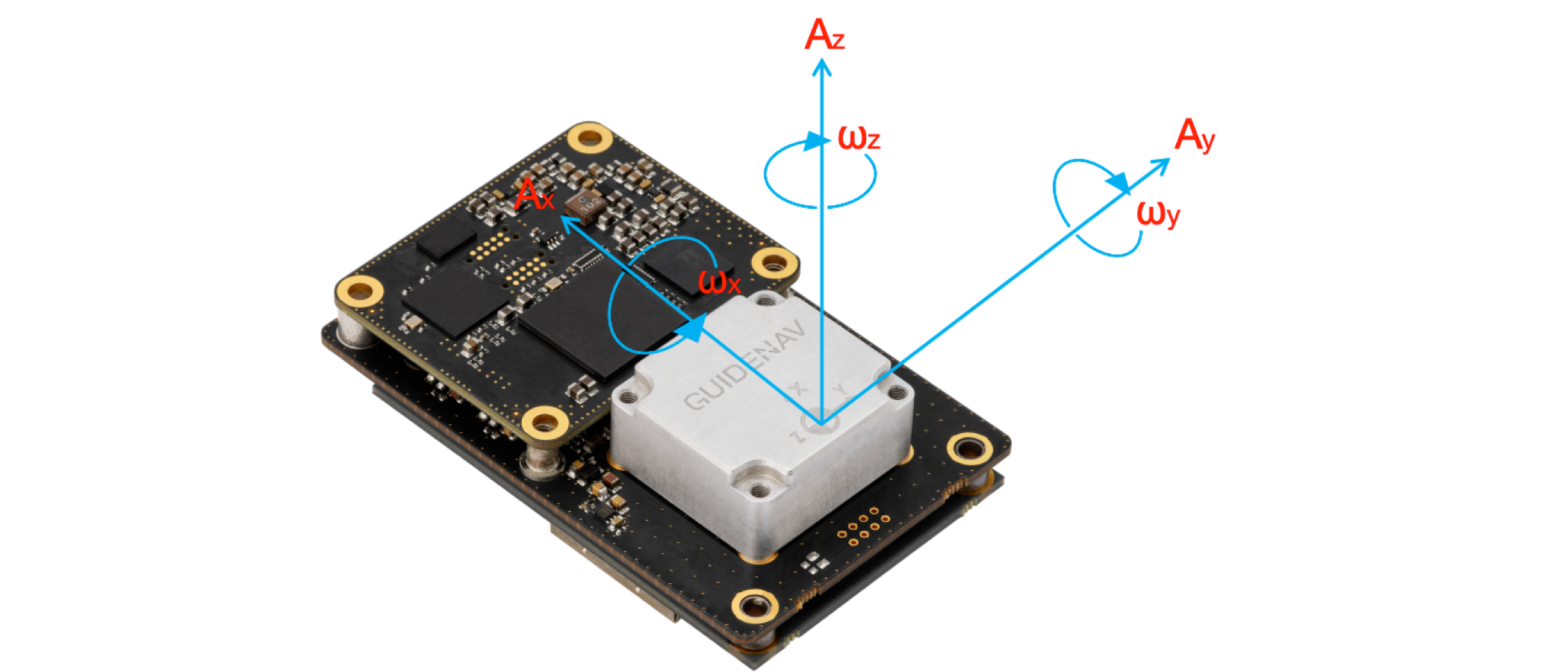
Une centrale inertielle (IMU) comprend généralement les capteurs clés suivants. Analysons-les en détail et voyons comment chacun contribue à la fonctionnalité globale :
| Composant | Fonction | Sortir |
|---|---|---|
| Accéléromètre | Mesure l'accélération linéaire selon les axes X, Y et Z. | Fournit des données sur la vitesse et le déplacement. |
| Gyroscope | Mesure la vitesse angulaire (taux de rotation) autour des axes X, Y et Z. | Fournit des données sur l'orientation (attitude). |
| Magnétomètre (en option) | Mesure l'intensité et la direction du champ magnétique par rapport au champ magnétique terrestre. | Indique le cap (direction de la boussole). |
Chacun de ces capteurs joue un rôle crucial en fournissant des données de mouvement en temps réel, nous aidant ainsi à comprendre comment l'objet se déplace et tourne dans l'espace.
Comment fonctionne une centrale inertielle ?
Voici comment, chez GuideNav , nous concevons les IMU pour un fonctionnement parfaitement fluide :
- Mesure de l'accélération : L' accéléromètre détecte les variations de vitesse selon trois axes. Ces données permettent de déterminer la vitesse d'accélération ou de décélération de l'objet, ce qui est essentiel pour le suivi de son déplacement au fil du temps.
- Mesure de la vitesse angulaire : Le gyroscope enregistre la rotation de l’objet autour de chacun des trois axes. En intégrant ces données de rotation dans le temps, l’IMU détermine l’orientation précise de l’objet dans l’espace.
- Mesure du champ magnétique (en option) : Si elle est incluse, la magnétomètre mesure le champ magnétique terrestre et fournit un cap. Cela permet de corriger toute dérive des mesures du gyroscope, garantissant ainsi la précision de l’IMU sur le long terme.
Chez GuideNav , nous utilisons des algorithmes de fusion de capteurs pour combiner les données provenant de ces composants. Ainsi, nous créons une représentation très précise de la position et de l'orientation de l'objet dans l'espace 3D.
Applications des centrales inertielles (IMU)
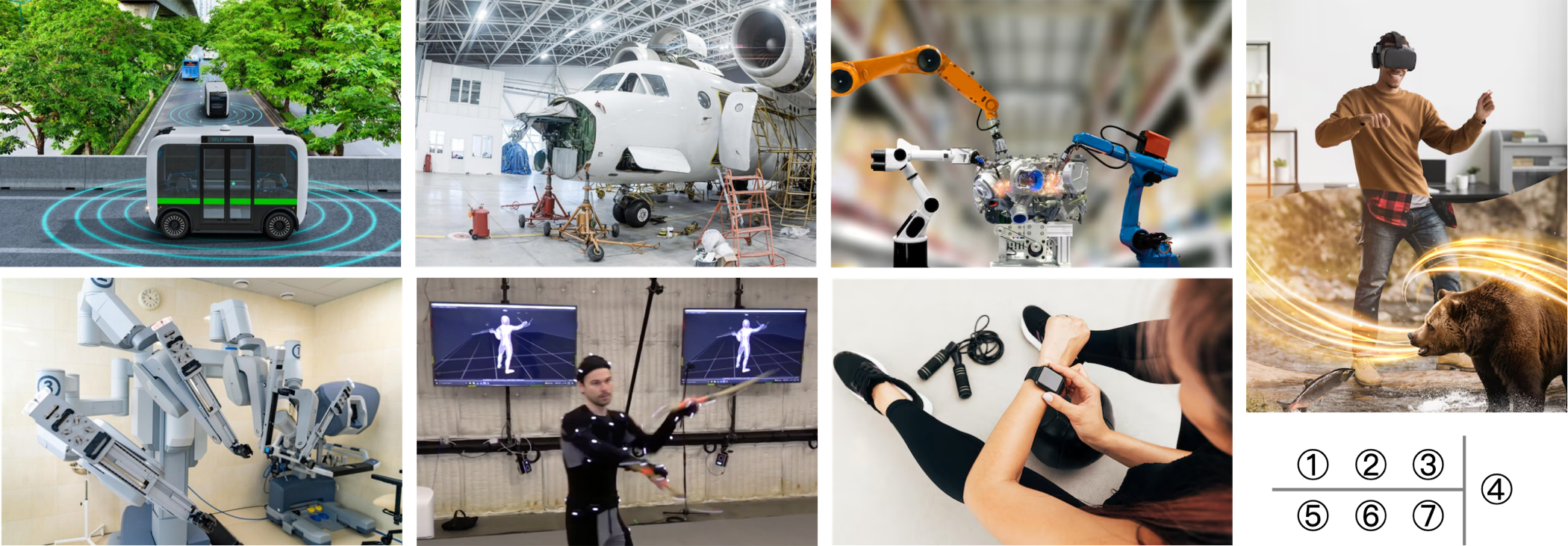
Les centrales inertielles (IMU) sont utilisées dans de nombreuses applications, fournissant des données essentielles sur l'accélération, la vitesse angulaire et parfois les champs magnétiques. Leur précision et leur polyvalence les rendent indispensables dans des secteurs tels que les véhicules autonomes, l'aérospatiale, la robotique, la réalité virtuelle, la santé, l'analyse sportive et l'électronique grand public. Nous allons explorer ci-dessous quelques-unes des principales applications où les IMU sont essentielles.
1. Véhicules autonomes et sans conducteur
IMU) sont essentielles au développement et au fonctionnement des véhicules autonomes . Elles permettent de suivre en temps réel les mouvements et l'orientation du véhicule, garantissant ainsi sa stabilité et une navigation précise. Si du système de positionnement global (GPS) sont souvent utilisées pour le positionnement, les IMU sont indispensables lorsque les signaux GPS sont faibles ou indisponibles (par exemple, dans les tunnels, les zones urbaines denses ou les régions isolées).
| Application | Rôle de l'IMU |
|---|---|
| Voitures autonomes | Fournit des données sur l'orientation et le mouvement du véhicule pour permettre une navigation stable. |
| Drones | Assure un contrôle précis de la trajectoire et de la position de vol. |
| Véhicules robotisés | Permet de suivre les déplacements en dehors des routes ou dans des environnements sans GPS. |
2. Aérospatiale et aviation
Les centrales inertielles (IMU) sont depuis longtemps essentielles aux aérospatiales et aéronautiques . Elles fournissent des données en temps réel sur l'orientation et le mouvement des aéronefs et des engins spatiaux. Utilisées aussi bien dans l'aviation commerciale que dans l'exploration spatiale , les IMU offrent une fiabilité et une précision élevées dans des environnements difficiles où le GPS peut être indisponible ou impraticable.
| Application | Rôle de l'IMU |
|---|---|
| Navigation aérienne | Fournit des données d'attitude (orientation) pour un vol stable. |
| Navigation des engins spatiaux | Assure une orientation précise et un contrôle optimal des mouvements dans l'espace. |
| Orientation du satellite | Maintient l'orientation et la trajectoire du satellite pendant son fonctionnement. |
3. Robotique
En robotique , les centrales inertielles (IMU) servent à surveiller les mouvements, l'orientation et l'équilibre des robots, que ce soit dans des applications industrielles, médicales ou grand public. Elles fournissent des informations aux systèmes de commande des robots, garantissant ainsi des mouvements fluides et précis dans divers environnements.
| Application | Rôle de l'IMU |
|---|---|
| Robots industriels | Assure un mouvement stable lors des opérations de fabrication. |
| Robots médicaux | Permet un contrôle précis des mouvements lors des interventions chirurgicales et de la rééducation. |
| Robots autonomes | Permet de suivre la position et l'orientation pour la navigation dans des environnements dynamiques. |
4. Réalité virtuelle (RV) et réalité augmentée (RA)
Dans le monde de la réalité virtuelle (RV) et de la réalité augmentée (RA) , les centrales inertielles (IMU) sont des composants essentiels pour le suivi des mouvements de la tête et du corps des utilisateurs. En mesurant la rotation, l'accélération et parfois les champs magnétiques, les IMU fournissent des données de mouvement en temps réel qui enrichissent l'expérience immersive.
| Application | Rôle de l'IMU |
|---|---|
| Casques de réalité virtuelle | Suit les mouvements de la tête pour ajuster l'environnement virtuel. |
| Appareils de réalité augmentée | Surveille les mouvements de la main pour interagir avec des objets virtuels. |
| Contrôle gestuel | Reconnaît les gestes de l'utilisateur pour l'interaction au sein des systèmes AR/VR. |
5. Dispositifs médicaux
Les centrales inertielles sont de plus en plus intégrées aux dispositifs médicaux à diverses fins, notamment le suivi des mouvements, la rééducation et le diagnostic. Leur capacité à mesurer des mouvements précis les rend indispensables pour comprendre et suivre l'évolution des patients.
| Application | Rôle de l'IMU |
|---|---|
| Réadaptation physique | Surveille les mouvements des patients pendant la thérapie afin de suivre leurs progrès. |
| Dispositifs portables | Permet de suivre l'évolution des troubles du mouvement, notamment chez les patients atteints de la maladie de Parkinson. |
| Capture de mouvement pour le diagnostic | Mesure les mouvements anormaux à des fins de diagnostic. |
6. Analyse des données sportives et capture de mouvement
Les centrales inertielles (IMU) sont largement utilisées en analyse sportive et en capture de mouvement pour surveiller les performances des athlètes et optimiser leurs mouvements. Le suivi précis des mouvements offert par les IMU contribue à la prévention des blessures, à l'analyse et à l'amélioration des performances.
| Application | Rôle de l'IMU |
|---|---|
| Performance des athlètes | Analyse les données de mouvement pour déterminer la vitesse, l'accélération et l'efficacité. |
| Prévention des blessures | Surveille les mouvements pour identifier les risques et optimiser l'entraînement. |
| Capture de mouvement | Capture les mouvements humains pour une utilisation dans le cinéma, l'animation et les jeux vidéo. |
7. Électronique grand public
Les centrales inertielles (IMU) sont également intégrées à de nombreux électroniques grand public , tels que les smartphones, les objets connectés et les manettes de jeux vidéo. Ces appareils utilisent les IMU pour détecter les mouvements et l'orientation, ce qui permet d'offrir diverses fonctionnalités et d'améliorer l'expérience utilisateur.
| Application | Rôle de l'IMU |
|---|---|
| Smartphones | Permet la rotation de l'écran, les commandes gestuelles et le suivi d'activité. |
| traqueurs d'activité physique | Surveille le nombre de pas, la distance parcourue et l'activité physique. |
| Manettes de jeu | Suit les mouvements du joueur pour des expériences de jeu immersives. |
Types d'unités de mesure inertielle (IMU) : IMU MEMS vs IMU FOG
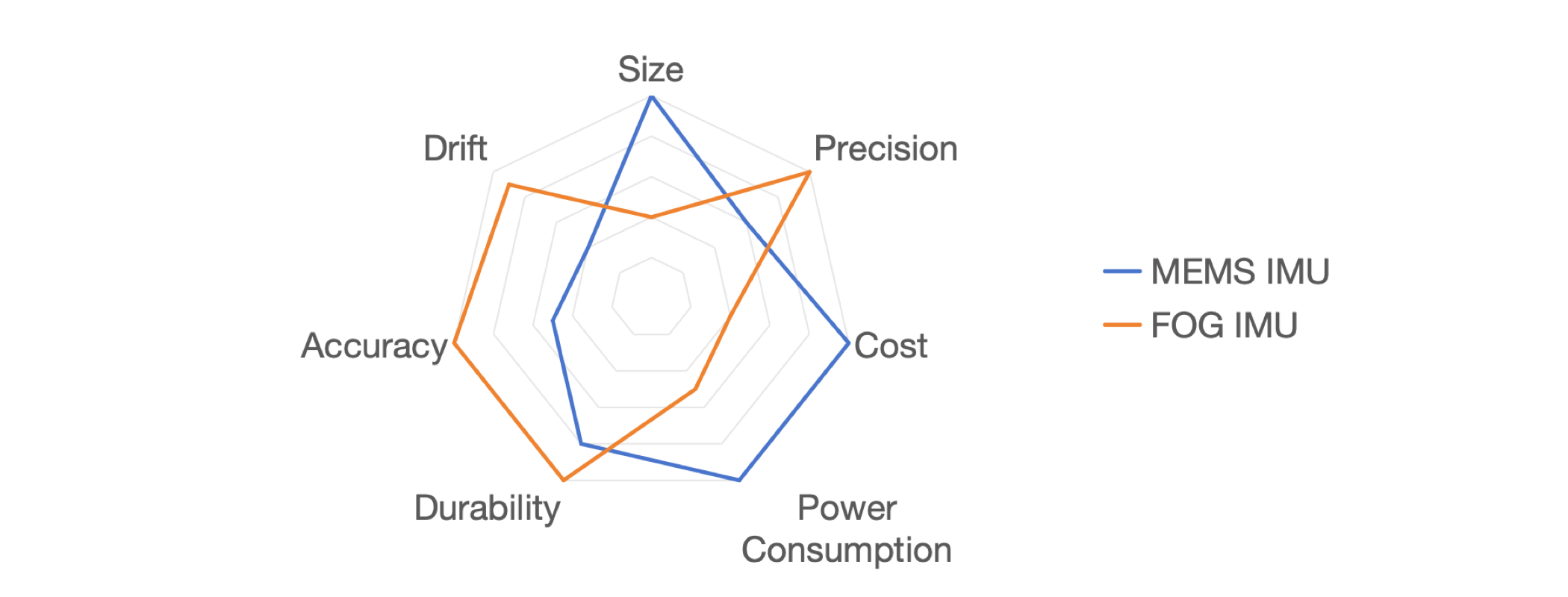
Les centrales inertielles (IMU) sont essentielles dans de nombreux secteurs industriels, notamment dans de défense et aérospatiales où une haute précision est primordiale. Les deux principaux types d'IMU, les IMU MEMS (systèmes micro-électromécaniques) et les IMU FOG (gyroscopes à fibre optique) , diffèrent considérablement en termes de performances, de taille, de coût et d'adéquation à différentes applications.
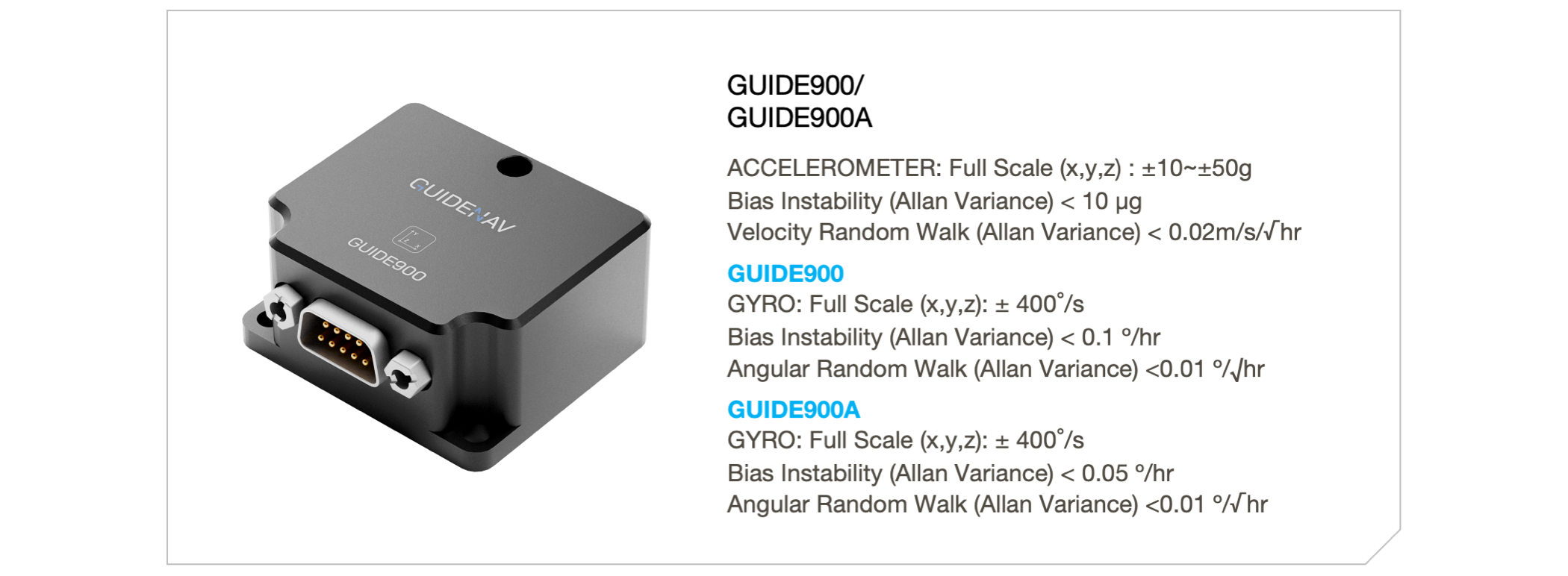
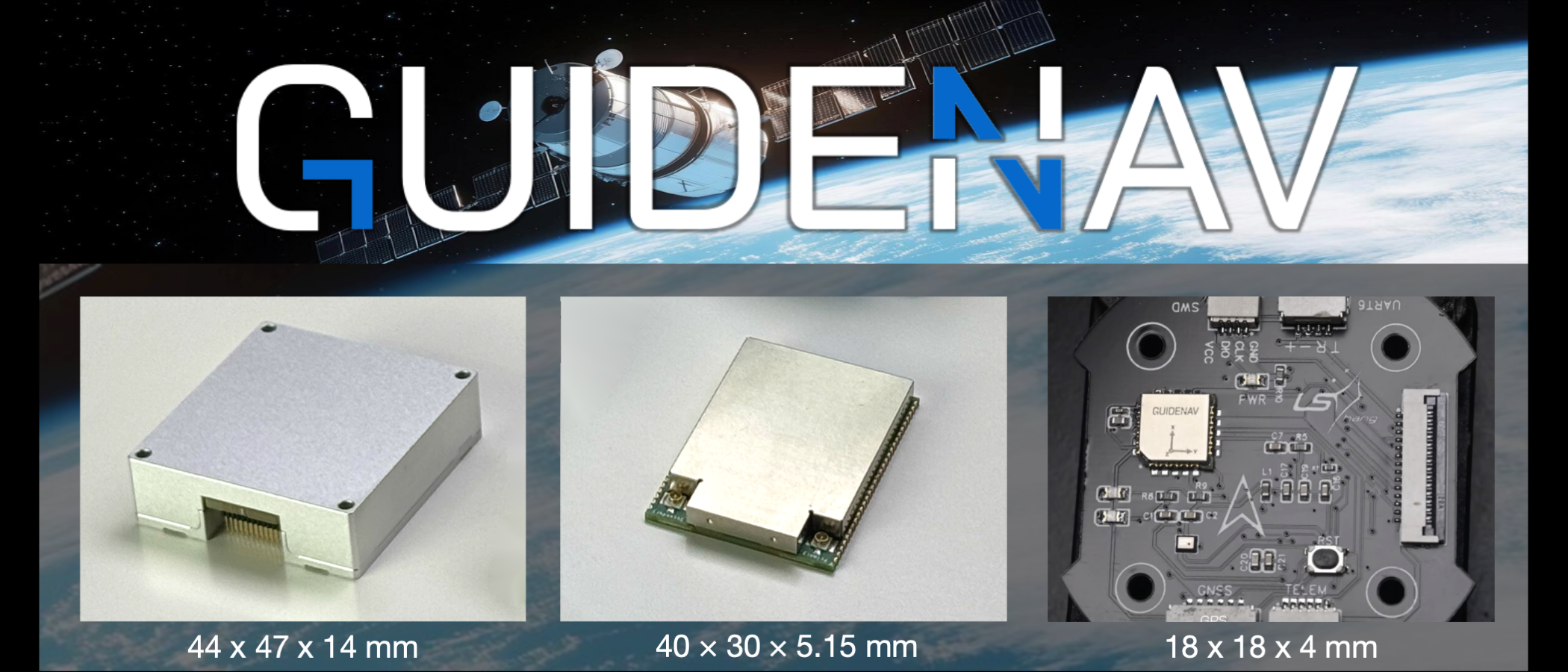
Bien que les centrales inertielles à gyroscope à fibre optique (FOG IMU) aient traditionnellement été utilisées dans des domaines de haute précision tels que l'aérospatiale, la défense et la robotique, les progrès récents en matière de (MEMS IMU) , comme les GUIDE900 et GUIDE900A , offrent désormais des niveaux de précision de 0,1°/h et 0,05°/h , comparables à ceux des centrales FOG IMU . Cette amélioration permet aux centrales MEMS IMU d'être utilisées dans des applications de haute précision auparavant dominées par les centrales FOG IMU .
MEMS IMU vs FOG IMU : Principales différences
| Paramètre | MEMS IMU | IMU FOG |
|---|---|---|
| Technologie | Basé sur systèmes microélectromécaniques (MEMS) . | Utilise des gyroscopes à fibres optiques (FOG) pour la mesure de la vitesse angulaire. |
| Taille | Compact et léger , idéal pour les appareils portables. | Plus grand, plus robuste, adapté aux applications de précision dans les systèmes à grande échelle. |
| Précision | Précision modérée, mais les IMU MEMS de haute précision plus récentes peuvent atteindre 0,1°/h ou 0,05°/h . | Précision extrêmement élevée, dérive minimale et stabilité accrue dans le temps. |
| Coût | Leur faible coût les rend idéaux pour les applications grand public. | Coût plus élevé dû à la technologie de pointe utilisée dans les systèmes haut de gamme. |
| Consommation d'énergie | Faible consommation d'énergie , convient aux appareils alimentés par batterie. | Consommation électrique plus élevée, mieux adaptée aux systèmes disposant de budgets énergétiques plus importants. |
| Durabilité | Moins résistant dans des conditions environnementales extrêmes. | Très résistant, capable de supporter des environnements difficiles. |
| Précision | Convient aux applications de précision faible à moyenne. | Haute précision, adaptée à une navigation et une stabilité de haute précision. |
| Applications | Électronique grand public, systèmes automobiles, drones, UAV, **systèmes militaires**. | Aérospatiale, défense, robotique industrielle, systèmes de navigation haut de gamme. |
| Dérive | Dérive plus importante au fil du temps, nécessitant un recalibrage. | Dérive très faible, idéale pour un fonctionnement à long terme sans recalibrage. |
| Temps de réponse | Réponse plus rapide grâce à une taille plus petite et une conception plus simple. | Réponse légèrement plus lente, mais offre une stabilité accrue dans le temps. |
MEMS IMU : Aperçu et caractéristiques
Les centrales inertielles MEMS utilisent des systèmes microélectromécaniques (MEMS) , qui intègre de petits composants mécaniques et électroniques sur une puce. Leurs principaux avantages résident dans leur taille réduite , faible coût et leur faible consommation d'énergie . Ces caractéristiques les idéales pour des applications en électronique grand public, dans les systèmes automobiles et, de plus en plus, dans le domaine militaire .
Chez GuideNav IMU MEMS de haute précision telles que les GUIDE900 et GUIDE900A , qui offrent des précisions de 0,1°/h et 0,05°/h respectivement, les rendant adaptées à certaines de haute précision qui étaient traditionnellement dominées par les IMU FOG .
Principales caractéristiques des centrales inertielles MEMS :
- Format compact : Idéal pour les applications compactes, telles que les smartphones , les objets connectés et les drones militaires .
- Faible coût : Idéal pour les applications à grand volume, telles que les systèmes automobiles , l'électronique grand public et les systèmes de défense, qui doivent trouver un équilibre entre performance et prix abordable.
- Précision modérée : Bien que les IMU MEMS offrent traditionnellement une précision inférieure à celle des IMU FOG , les modèles haute précision comblent désormais cet écart pour de nombreuses applications de défense.
- Faible consommation d'énergie : Très efficace pour les appareils fonctionnant sur batterie, un atout crucial pour les drones militaires , les systèmes d'armes intelligents et autres technologies de défense mobiles.
Applications des centrales inertielles MEMS :
- Défense : Utilisés dans les drones militaires , les systèmes de navigation pour véhicules blindés et les systèmes de guidage de missiles MEMS IMU bénéficient de leur compacité et de leur faible coût.
- Électronique grand public : On la trouve dans les smartphones , les traqueurs d’activité physique et les manettes de jeux .
- Systèmes automobiles : Utilisés dans le contrôle de stabilité du véhicule et la navigation autonome .
- Drones et UAV : Fournir une orientation et une stabilisation aux drones militaires et aux UAV grand public .
IMU FOG : Aperçu et caractéristiques
à fibre optique ( FOG IMU utilisent pour mesurer la vitesse angulaire, ce qui leur confère une précision et une stabilité extrêmement élevées. Elles idéales pour les applications exigeant une dérive minimale et une fiabilité à long terme, telles que la navigation aérospatiale , le guidage de missiles et la robotique de pointe .
Si les IMU FOG sont largement reconnues pour leur précision et leur durabilité, les IMU MEMS comblent l'écart en matière de performances, notamment dans les applications militaires où le coût, la taille et la consommation d'énergie sont des considérations essentielles.
Principales caractéristiques des IMU FOG :
- Haute précision : Les IMU FOG offrent une dérive extrêmement faible, ce qui les rend idéales pour les applications de haute précision telles que la navigation par satellite et les systèmes de guidage militaires.
- Durabilité : Grâce à leur capacité à résister à des conditions environnementales extrêmes, les IMU FOG sont idéales pour aérospatiaux et militaires qui doivent fonctionner dans des environnements difficiles.
- Consommation d'énergie plus élevée : les IMU FOG consomment généralement plus d'énergie, ce qui les rend mieux adaptées aux systèmes disposant de ressources énergétiques suffisantes.
- Taille plus importante : Les IMU FOG sont plus volumineuses que les IMU MEMS , c'est pourquoi elles sont utilisées dans des systèmes plus grands comme les avions et les engins spatiaux .
Applications des IMU FOG :
- Aérospatiale : Utilisée dans la navigation aérienne et , où une précision et une stabilité élevées sont essentielles.
- Défense : Largement utilisé dans le guidage des missiles , les véhicules militaires sans pilote et les systèmes de navigation militaire .
- Robotique de pointe : utilisée en robotique industrielle , en robotique chirurgicale et dans les systèmes de navigation autonomes où la précision et la stabilité à long terme sont nécessaires.
Quand choisir une centrale inertielle MEMS plutôt qu'une centrale inertielle à champ (FOG) ?
| Cas d'utilisation | MEMS IMU | IMU FOG |
|---|---|---|
| Électronique grand public | Idéal pour les smartphones, les objets connectés et les traqueurs d'activité physique. | Ne convient pas en raison de son coût élevé et de sa forte consommation d'énergie. |
| Aérospatiale et aviation | Convient aux systèmes économiques et de petite taille présentant des exigences de précision modérées. | Indispensable pour les systèmes de navigation et d'orientation de haute précision. |
| Véhicules autonomes | Idéal pour les solutions à moindre coût avec des exigences de performance modérées. | Nécessaire pour une navigation de haute précision dans des environnements complexes. |
| Militaire et défense | Utilisé dans les **drones militaires**, les **systèmes de navigation** pour **véhicules** et les **systèmes de guidage de missiles**. | Largement utilisé pour le guidage de missiles, les drones et la navigation dans des conditions difficiles. |
| Robotique | Convient aux robots grand public ou aux projets éducatifs. | Privilégié pour les robots industriels, les robots chirurgicaux et autres systèmes de précision. |
Performances et étalonnage de l'unité de mesure inertielle (IMU)
Les performances des centrales inertielles (IMU) peuvent être influencées par divers facteurs, tels que la dérive des capteurs, la température et les conditions environnementales. Pour garantir des performances optimales, il est essentiel de comprendre les indicateurs clés de performance (KPI) des IMU et les méthodes d'étalonnage utilisées pour améliorer leur précision.
Indicateurs de performance de l'IMU
Les performances d'une centrale inertielle (IMU) sont évaluées en fonction de plusieurs facteurs clés qui influencent directement sa précision et sa fiabilité. Voici les principaux indicateurs de performance des IMU :
| Indicateur de performance | Description |
|---|---|
| Stabilité du biais | La constance des mesures de l'IMU au fil du temps. Une IMU stable présentera une déviation minimale dans ses mesures. |
| Facteur d'échelle | Le rapport entre le mouvement physique réel et la sortie de l'IMU. Toute erreur dans ce rapport peut entraîner une interprétation incorrecte des données. |
| Bruit | Variations aléatoires dans les relevés du capteur de l'IMU. Un faible niveau de bruit indique une plus grande précision des mesures. |
| marche aléatoire | Décrit la dérive des mesures au fil du temps. Elle indique l'écart entre la mesure et sa valeur réelle dû au bruit aléatoire. |
| Résolution | La plus petite variation mesurable dans les relevés du capteur de l'IMU. Une résolution plus élevée améliore la précision des mesures. |
| Non-linéarité | L'écart par rapport à une relation linéaire entre l'entrée et la sortie. Les non-linéarités peuvent engendrer des erreurs aux accélérations ou vitesses angulaires élevées. |
| Sensibilité à la température | Les variations des mesures des centrales inertielles sont dues aux changements de température ambiante. Les centrales inertielles à faible sensibilité à la température sont plus précises dans des conditions environnementales fluctuantes. |
Méthodes d'étalonnage des IMU
L'étalonnage est un processus essentiel qui contribue à améliorer la précision d'une centrale inertielle (IMU) en corrigeant les erreurs dues à la dérive des capteurs, au défaut d'alignement et à d'autres facteurs. L'étalonnage d'une IMU fait généralement intervenir trois systèmes de capteurs principaux : l' accéléromètre , le gyroscope et le magnétomètre . Chacun de ces capteurs requiert des techniques d'étalonnage spécifiques pour garantir des mesures précises et fiables.
1. Étalonnage de l'accéléromètre
L' accéléromètre d'une centrale inertielle mesure l'accélération linéaire selon les axes X, Y et Z. Cependant, il est souvent sujet à des erreurs telles que des écarts de facteur d'échelle, des défauts d'alignement et une non-orthogonalité des axes.
| Méthode d'étalonnage | Description |
|---|---|
| Étalonnage statique | Une méthode courante consiste à placer l'IMU selon une orientation connue (par exemple, à plat sur une surface). En mesurant l'accélération due à la gravité (9,81 m/s²), les erreurs du capteur peuvent être corrigées. |
| Étalonnage dynamique | Cela implique de déplacer l'IMU selon différentes accélérations et directions connues afin de corriger les erreurs de facteur d'échelle, les biais et les défauts d'alignement entre les axes. |
| Compensation de température | Les accéléromètres étant sensibles à la température, l'étalonnage comprend également la compensation des variations de température susceptibles d'entraîner des erreurs de mesure. |

2. Calibrage du gyroscope
Le gyroscope mesure la vitesse angulaire autour des axes X, Y et Z de l'IMU. Les gyroscopes peuvent présenter une dérive (les mesures du capteur évoluent lentement avec le temps) et une instabilité de biais (un décalage constant dans les mesures).
| Méthode d'étalonnage | Description |
|---|---|
| Étalonnage du décalage à taux zéro | Dans cette méthode, le gyroscope est placé en position stationnaire (sans mouvement), et le décalage ou le biais est mesuré et corrigé. |
| Étalonnage du tableau des taux | Cela implique de faire tourner l'IMU à différentes vitesses angulaires connues afin de déterminer toute non-linéarité ou erreur de facteur d'échelle. |
| Étalonnage de la température | À l'instar des accéléromètres, les gyroscopes sont sensibles aux variations de température. L'étalonnage permet de corriger les variations de comportement du capteur à différentes températures. |
L'étalonnage du gyroscope garantit que les mesures de vitesse angulaire de l'IMU sont précises et exemptes de dérive, améliorant ainsi ses performances dans les environnements dynamiques.
3. Étalonnage du magnétomètre
Le magnétomètre mesure l'intensité et la direction du champ magnétique terrestre, fournissant des données d'orientation utilisées pour déterminer le cap. Les magnétomètres peuvent être affectés par des perturbations magnétiques locales, un mauvais alignement des capteurs et des erreurs de facteur d'échelle.
| Méthode d'étalonnage | Description |
|---|---|
| Calibrage du fer dur | Cette méthode compense les distorsions du champ magnétique causées par les composants propres de l'IMU (par exemple, les dispositifs électroniques). |
| Calibrage du fer doux | Corrige les distorsions causées par l'environnement ou les matériaux situés à proximité de l'IMU. |
| Étalonnage multipoint | Le magnétomètre est exposé à diverses intensités et directions de champ magnétique connues afin de détecter et de corriger les erreurs. |
L'étalonnage du magnétomètre est essentiel pour obtenir des données précises de cap et d'orientation, notamment lorsque l'IMU est utilisée dans des environnements aux conditions magnétiques variables.
Avantages et limites des centrales inertielles (IMU)
Les centrales inertielles offrent des performances exceptionnelles en temps réel, une indépendance vis-à-vis des systèmes externes et une grande adaptabilité à différents secteurs industriels. Toutefois, leur dérive , leur sensibilité environnementale et le coût élevé des modèles de précision doivent être pris en compte lors du choix de la technologie la plus adaptée. Les centrales inertielles MEMS offrent un bon compromis entre coût et performance pour de nombreuses applications grand public et industrielles, tandis que les centrales inertielles FOG sont privilégiées pour de haute précision et de longue durée dans les secteurs de l'aérospatiale et de la défense. Comprendre les atouts et les limites des centrales inertielles vous permettra de sélectionner le système le mieux adapté à vos besoins spécifiques.
Avantages des centrales inertielles
| Avantage | Description |
|---|---|
| Haute précision dans les environnements dynamiques | Les centrales inertielles (IMU) fournissent des mesures en temps réel de l'accélération et de la vitesse angulaire, essentielles pour les applications dans les véhicules autonomes , l'aérospatiale et la robotique , où le GPS ou d'autres références externes ne sont pas disponibles. |
| Indépendance vis-à-vis des signaux externes | Les centrales inertielles fonctionnent sans dépendre de signaux externes comme le GPS , ce qui les rend extrêmement fiables dans des environnements tels que la navigation souterraine , l'exploration spatiale ou la robotique d'intérieur . |
| Compact et léger | Les centrales inertielles MEMS sont petites et légères, idéales pour des applications telles que les objets connectés , les drones et l'électronique grand public où l'espace et le poids sont des facteurs critiques. |
| Faible consommation d'énergie | Les centrales inertielles MEMS sont économes en énergie, idéales pour les appareils alimentés par batterie comme les montres connectées et les traqueurs d'activité physique qui doivent fonctionner pendant de longues périodes. |
| Traitement des données en temps réel | Les IMU fournissent des données à haute fréquence et à faible latence, ce qui les rend adaptées au contrôle en temps réel en robotique , à la stabilisation des drones et à la navigation des véhicules . |
| Durabilité en environnements difficiles | Les IMU FOG IMU MEMS haut de gamme peuvent résister à des conditions extrêmes telles que de fortes vibrations , des variations de température et des chocs , ce qui les rend idéales pour militaires et aérospatiales . |
Limites des centrales inertielles
| Limitation | Description |
|---|---|
| Dérive au fil du temps | Les gyroscopes des centrales inertielles accumulent une dérive au fil du temps, ce qui entraîne des mesures inexactes à moins d'être recalibrés régulièrement. Ceci représente un problème important pour les applications de longue durée. |
| Sensibilité environnementale | Les centrales inertielles sont sensibles aux conditions environnementales telles que la température et les vibrations , ce qui peut introduire des erreurs, en particulier dans les centrales inertielles MEMS qui sont plus sujettes à ces perturbations. |
| Coût élevé (pour les modèles de haute précision) | Bien que les IMU MEMS soient économiques, les IMU de haute précision telles que les IMU FOG sont coûteuses et peuvent ne pas convenir à toutes les applications en raison de leur coût élevé et de leur consommation d'énergie. |
| Précision à court terme vs stabilité à long terme | Les IMU offrent une excellente précision à court terme , mais sans correction externe (par exemple, GPS ), elles subissent une instabilité à long terme , ce qui représente un défi pour les tâches de navigation de haute précision sur de longues périodes. |
| Complexité de la fusion de données | Les IMU nécessitent souvent la fusion de capteurs (par exemple, l'intégration de GPS et de magnétomètres ) pour corriger les erreurs au fil du temps, ce qui ajoute de la complexité et de la charge de calcul au système. |
| Précision limitée en dynamique élevée | Dans les applications à forte dynamique , les IMU MEMS peuvent ne pas égaler la précision des IMU FOG , notamment dans des applications comme le guidage de missiles ou l'orientation de véhicules spatiaux , qui nécessitent une ultra-haute précision. |
Centrale inertielle (IMU) vs autres systèmes inertiels : IMU vs AHRS, IMU vs INS
Les centrales inertielles (IMU) sont essentielles dans de nombreuses applications de haute technologie, mais elles ne sont pas les seuls systèmes disponibles pour mesurer le mouvement, l'orientation et la navigation. Les systèmes de référence d'attitude et de cap (AHRS) et les systèmes de navigation inertielle (INS) sont deux autres systèmes couramment utilisés qui reposent également sur des capteurs inertiels. Si les IMU fournissent les données fondamentales aux AHRS et aux INS, ces systèmes offrent des fonctionnalités supplémentaires et sont conçus pour des cas d'utilisation spécifiques. Comparons maintenant les IMU aux AHRS et aux INS .
IMU vs AHRS (Système de référence d'attitude et de cap)
Les IMU et les AHRS sont tous deux utilisés pour le suivi de l'orientation et du mouvement, mais ils diffèrent en termes de fonctionnalités supplémentaires et de leurs cas d'utilisation respectifs.
| Paramètre | IMU | AHRS |
|---|---|---|
| Définition | Une **unité de mesure inertielle (IMU)** mesure l'accélération et la vitesse angulaire, fournissant des données de mouvement brutes. | Un **système de référence d'attitude et de cap (AHRS)** combine les **données IMU** avec des capteurs supplémentaires (par exemple, des magnétomètres) pour fournir des données d'orientation et de cap. |
| Composants | Il comprend généralement des **accéléromètres** et des **gyroscopes**, parfois des **magnétomètres**. | Utilise les **données IMU** (accéléromètres et gyroscopes) ainsi que les **magnétomètres** et parfois d'autres capteurs (par exemple, **GPS**, **baromètres**). |
| Sortir | Fournit des données brutes d'accélération et de vitesse angulaire. | Fournit l'orientation (attitude) et le cap (direction de la boussole) dans un cadre global (par exemple, Nord, Est, Bas). |
| Précision | Les centrales inertielles (IMU) assurent un suivi précis des mouvements, mais peuvent souffrir d'une **dérive** au fil du temps en raison d'erreurs de capteurs. | L'AHRS améliore la précision en utilisant des références externes (magnétomètres, GPS), réduisant ainsi la dérive au fil du temps. |
| Complexité | De conception et de fonctionnement plus simples, généralement pour le suivi de mouvement de base. | Plus complexe en raison de l'ajout |
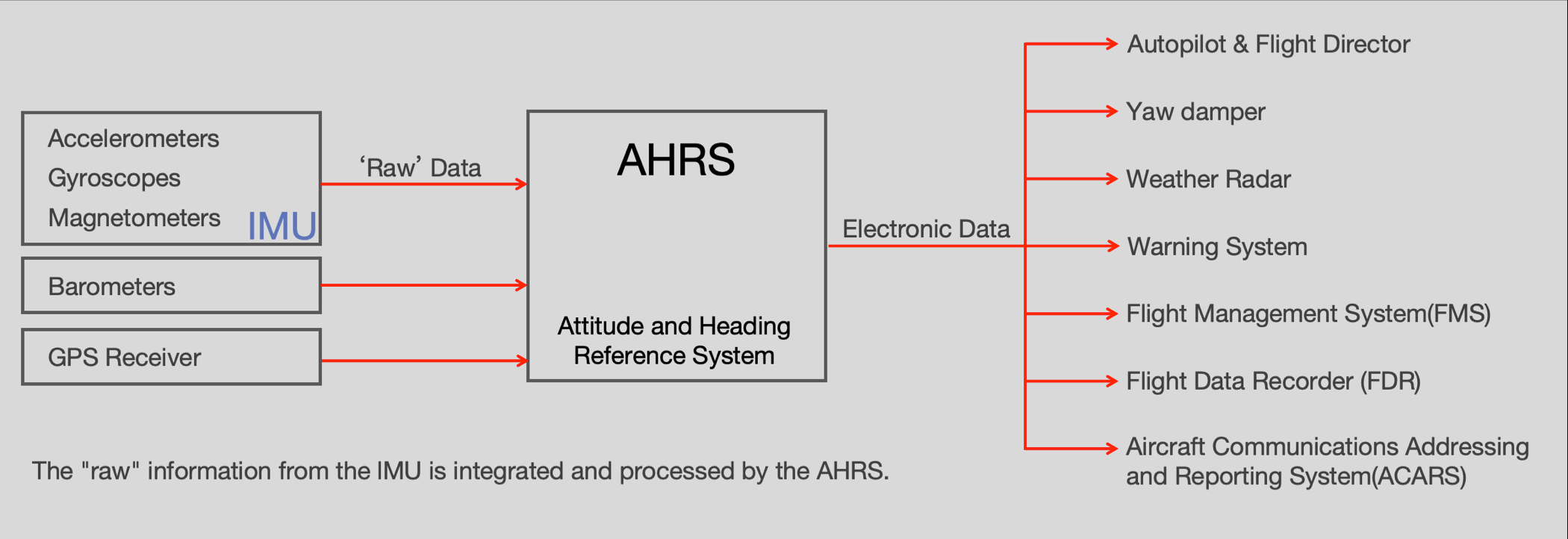
Différence principale : (IMU) fournissent des données brutes, tandis que (AHRS ) fusionnent ces données avec celles d’autres capteurs (comme les magnétomètres) pour fournir une orientation et un cap précis. L’AHRS est généralement utilisé lorsque des informations précises sur l’attitude et le cap sont requises.
IMU vs INS (Système de navigation inertielle)
Un système de navigation inertielle (INS) est un système plus avancé qui intègre IMU avec des capacités de traitement supplémentaires, utilisant souvent des algorithmes comme le filtrage de Kalman pour calculer la position, la vitesse et l'orientation d'un objet.
| Paramètre | IMU | INS |
|---|---|---|
| Définition | Une **unité de mesure inertielle (IMU)** mesure l'accélération et la vitesse angulaire, fournissant des données de mouvement brutes. | Un **système de navigation inertielle (INS)** combine une **IMU** avec un traitement informatique (par exemple, un filtre de Kalman) pour suivre la position, la vitesse et l'orientation. |
| Composants | Comprend des **accéléromètres** et des **gyroscopes**; parfois des **magnétomètres**. | Combine une **IMU**, des **algorithmes** pour la fusion de capteurs et parfois d'autres capteurs (par exemple, **GPS**). |
| Sortir | Fournit des données sur l'accélération et la vitesse angulaire. | Fournit les données de **position**, de **vitesse** et d'**orientation**, offrant ainsi des données de navigation complètes. |
| Précision | Les centrales inertielles (IMU) ont une précision limitée dans le temps en raison de la dérive. | **INS** améliore la précision au fil du temps en fusionnant les données IMU avec des algorithmes et parfois des corrections externes (par exemple, GPS). |
| Complexité | Simple, fournissant uniquement des données de mouvement. | Complexe en raison de la fusion des données, du traitement des capteurs et de la nécessité d'algorithmes de calcul. |
| Applications | Utilisé pour le suivi de mouvement de base, notamment dans les drones, l'automobile et la robotique. | Utilisé pour la **navigation** dans les **aéronefs**, les **sous-marins**, les **engins spatiaux** et les **applications militaires**, où le suivi de position à long terme est essentiel. |
Différence clé : Alors que les IMU mesurent le mouvement et l’orientation, les INS utilisent ces données ainsi que des algorithmes pour calculer la position , la vitesse et l’orientation au fil du temps, offrant ainsi une solution de navigation complète.
Marché des centrales inertielles et perspectives d'avenir : types, perspectives de marché et tendances
Les centrales inertielles (IMU) sont essentielles aux systèmes modernes de navigation, de suivi de mouvement et de contrôle de stabilité dans de nombreux secteurs industriels. La demande croissante en systèmes autonomes , robotique , aérospatiale et électronique grand public a stimulé l'évolution des technologies IMU et favorisé leur adoption à l'échelle mondiale. Face à l'expansion continue du marché des IMU, il est indispensable de comprendre les différents types d'IMU, leur situation actuelle et les tendances qui façonneront leur développement futur.
Différents types d'IMU et aperçu du marché
IMU) se présentent sous différentes formes, chacune répondant à des exigences spécifiques en matière de précision, de taille, de coût et de performance. Les types d'IMU les plus couramment utilisés sont les IMU MEMS , les IMU FOG et les IMU RLG (gyroscopes laser annulaires) . Chacune possède des caractéristiques uniques, la rendant adaptée à des applications particulières. Examinons ces types et leur situation actuelle sur le marché.
1. Centrales inertielles MEMS
Les centrales inertielles MEMS sont les plus répandues grâce à leur taille compacte , leur faible coût et leur faible consommation d'énergie . Elles utilisent des capteurs microélectromécaniques (MEMS) pour mesurer l'accélération et la vitesse angulaire. Les centrales inertielles MEMS sont particulièrement adaptées à l'électronique grand public, aux applications automobiles et aux systèmes économiques.
| Caractéristiques | MEMS IMU |
|---|---|
| Taille | Compact , petit et léger. |
| Coût | Leur faible coût les rend abordables pour une adoption à grande échelle. |
| Précision | Précision modérée, bien que les modèles plus récents atteignent une précision plus élevée (par exemple, **0,1°/h**). |
| Applications | Utilisé dans l'**électronique grand public**, les **systèmes automobiles**, les **drones**, la **robotique** et les **objets connectés**. |
| Croissance du marché | Forte croissance tirée par les **smartphones**, la **sécurité automobile**, la **technologie des drones** et les **objets connectés**. |
Perspectives du marché des centrales inertielles MEMS:
Le marché des centrales inertielles MEMS devrait poursuivre sa croissance grâce à leur prix abordable et leur polyvalence. Ces centrales sont de plus en plus utilisées dans les smartphones , les objets connectés , les systèmes de sécurité automobile , la stabilisation des drones et la robotique . Les de l'automobile et de l'électronique grand public demeurent des moteurs essentiels de cette croissance, notamment grâce à l'adoption croissante des véhicules autonomes et des objets connectés (IoT) .
2. Centrales inertielles à fibre optique (FIG IMU)
(FOG IMU) offrent une haute précision et une faible dérive , ce qui les rend idéales pour aérospatiaux , de défense et de navigation dans des environnements exigeant une stabilité et une précision à long terme. Les FOG utilisent la technologie de la fibre optique pour mesurer la vitesse angulaire et sont reconnues pour leur robustesse dans des conditions extrêmes.
| Caractéristiques | IMU FOG |
|---|---|
| Taille | Plus grandes et plus robustes que les centrales inertielles MEMS, elles sont conçues pour les applications de haute précision. |
| Coût | **Coût plus élevé**, les rendant adaptées à des applications spécialisées dans les secteurs **aérospatial** et **militaire**. |
| Précision | **Haute précision** avec une dérive minimale, idéale pour une **stabilité à long terme** dans les systèmes **aérospatiaux**, **de défense** et **de navigation**. |
| Applications | Utilisé dans l'**aérospatiale**, la **défense militaire**, les **systèmes de navigation haut de gamme** et les **systèmes de guidage de précision**. |
| Croissance du marché | Croissance soutenue dans les secteurs de l'**aérospatiale**, de la **militaire** et de la **navigation de haute précision**, mais limitée par des coûts élevés. |
Perspectives du marché pour les IMU FOG:
Le à gyroscope (FOG IMU) devrait connaître une croissance régulière dans de l'aérospatiale , de la défense et de la navigation de haute précision . La demande croissante en véhicules autonomes , en exploration spatiale et en systèmes de guidage de missiles favorisera l'adoption des FOG IMU. Toutefois, leur coût élevé et leur consommation énergétique constituent des freins à une plus large diffusion sur le marché, notamment pour les applications grand public à bas coût.
3. Centrales inertielles RLG (centrales inertielles à gyroscope laser annulaire)
Les centrales inertielles RLG sont similaires aux centrales inertielles FOG , mais utilisent des gyroscopes laser annulaires pour mesurer la vitesse angulaire. Réputées pour leur extrême précision et leur grande stabilité, elles sont fréquemment utilisées dans les secteurs militaire, aérospatial et autres secteurs de haute performance.
| Caractéristiques | RLG IMU |
|---|---|
| Taille | Similaires aux **IMU FOG**, **plus grandes** et plus robustes, conçues pour les **applications de haute précision** dans des environnements difficiles. |
| Coût | **Coût très élevé**, généralement réservé aux systèmes haut de gamme et critiques pour la mission dans les secteurs de l'**aérospatiale** et de la **militaire**. |
| Précision | **Extrêmement haute précision** avec une dérive minimale, souvent utilisée dans les systèmes de **navigation des engins spatiaux** et de **guidage des missiles militaires**. |
| Applications | Utilisé dans les systèmes **militaires**, **spatiaux**, **de navigation par satellite** et autres **systèmes de défense de haute précision**. |
| Croissance du marché | Bien que de niche, les **IMU RS** restent essentielles pour les systèmes de **défense de haute performance**, l'**aérospatiale** et les **systèmes spatiaux**. Le marché est stable, avec une croissance modérée due aux coûts élevés. |
Perspectives du marché pour les centrales inertielles RLG:
Bien que le centrales inertielles à radiogoniométrie (RLG IMU) soit limité par leur coût élevé, elles demeurent essentielles pour militaires et aérospatiales , notamment pour le guidage des missiles et les systèmes d'orientation des satellites . Les RLG IMU continueront de jouer un rôle crucial dans ces secteurs, mais pourraient être concurrencées par les (FOG IMU) et les technologies émergentes.
Tendances futures et développement des centrales inertielles
L'avenir des centrales inertielles est marqué par plusieurs évolutions majeures, impulsées par les progrès réalisés dans les technologies de capteurs, les algorithmes de traitement des données et la demande croissante de systèmes de précision dans divers secteurs industriels. Voici quelques-unes des principales tendances :
1. Miniaturisation et intégration avec d'autres capteurs
Face à la demande croissante de systèmes compacts et performants des centrales inertielles (IMU) est une tendance de plus en plus marquée . Les IMU MEMS continueront d'évoluer, devenant toujours plus petites, plus économiques et plus puissantes. Par ailleurs, la fusion de capteurs constitue un axe de développement majeur : les IMU sont intégrées à d'autres capteurs, tels que des magnétomètres , des GPS et des baromètres , afin d'améliorer leurs performances et leur précision.
2. Haute précision à moindre coût
Les récents progrès de des centrales inertielles MEMS favorisent une plus grande précision à moindre coût . Des modèles comme le GUIDE900 et le GUIDE900A atteignent désormais de 0,1°/h et 0,05°/h , respectivement, réduisant ainsi l'écart avec les centrales inertielles FOG . De ce fait, les centrales inertielles MEMS seront utilisées dans un nombre croissant de haute précision , notamment dans aérospatiaux et militaires , traditionnellement dominés par les centrales inertielles FOG .
3. Intégration dans les systèmes autonomes
Les centrales inertielles (IMU) sont essentielles au développement des véhicules autonomes , des drones et de la robotique . L'intérêt croissant pour la navigation autonome et le contrôle précis des mouvements stimulera la demande en IMU de pointe. L'intégration des IMU aux algorithmes d'intelligence artificielle et à l'apprentissage automatique permet aux systèmes de s'adapter plus efficacement aux environnements réels.
4. Utilisation de l'IA et de la fusion de capteurs
Les algorithmes d'IA joueront un rôle de plus en plus important dans le traitement des données des centrales inertielles . En combinant ces données avec celles d'autres capteurs et en utilisant l'apprentissage automatique , les systèmes autonomes pourront effectuer des prédictions et des ajustements plus précis. L'association des centrales inertielles à des technologies telles que les systèmes de vision , le LiDAR et le radar devrait repousser les limites de la navigation et de la stabilisation en temps réel.
5. Durabilité et résilience environnementale améliorées
Les centrales inertielles (IMU) devraient devenir encore plus robustes et résistantes aux conditions difficiles telles que les températures extrêmes, les vibrations et les interférences électromagnétiques. Les IMU à gyroscope à fibre optique (FOG) et les IMU MEMS évolueront pour répondre à la demande croissante dans de l'aérospatiale , de la défense et de l'industrie .
