D'après mon expérience en conception de systèmes inertiels pour les opérations de terrain, les ingénieurs négligent souvent un paramètre d'apparence simple : la marche aléatoire angulaire (ARW). Moins spectaculaire que la stabilité du biais ou la bande passante, l'ARW définit la limite de fiabilité du système en conditions réelles, notamment en cas de perte du signal GNSS. Ce n'est pas une erreur que l'on corrige par étalonnage ; c'est un bruit qui s'amplifie seconde après seconde. Comprendre son fonctionnement change radicalement la façon d'évaluer chaque centrale inertielle en laboratoire.
L'ARW n'est pas une spécification, c'est une horloge. Dès le démarrage de votre centrale inertielle, elle indique la vitesse à laquelle la précision d'orientation se dégrade. Plus sa valeur est basse, plus votre système conserve longtemps sa position correcte.
Au fil des ans, j'ai vu des équipes choisir des centrales inertielles (IMU) en se basant sur les spécifications de biais et les graphiques de bande passante, pour ensuite se heurter à une dérive impossible à simuler. Cette dérive ne provient souvent pas d'un détail négligé, mais d'un facteur qu'elles ont sous-estimé : la marge d'erreur absolue (ARW). Une fois que l'on comprend que l'ARW définit la marge de bruit, on aborde les fiches techniques différemment. On cesse de se demander « Quelle est la précision ? » et on commence à se demander « Combien de temps puis-je me fier à cet appareil avant que l'incertitude ne devienne problématique ? »
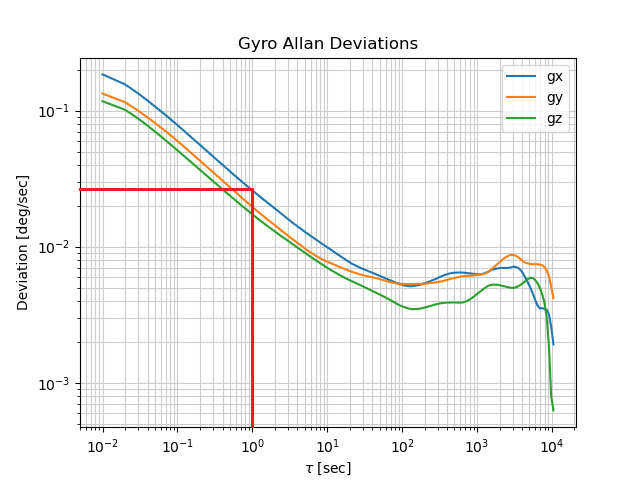
Table des matières
Qu'est-ce que la marche aléatoire angulaire (ARW) exactement ?
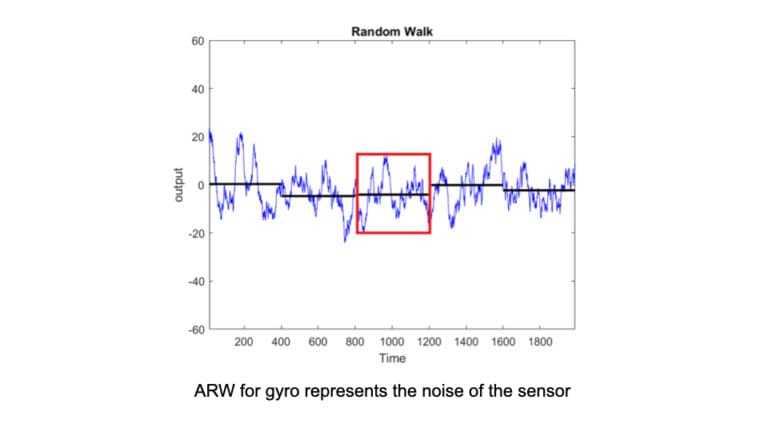
En termes simples, la marche aléatoire angulaire (ARW) correspond au bruit accumulé par votre gyroscope dès le début de l'intégration de la vitesse angulaire. Attention : il ne s'agit ni d'une erreur de mesure, ni d'une dérive de biais. L'ARW représente l'augmentation de l'incertitude, proportionnelle à la racine carrée du temps, due au bruit blanc présent dans le trajet du signal du gyroscope. Impossible de l'éliminer par étalonnage, ni d'attendre sa stabilisation : elle est toujours présente, en arrière-plan.
J'explique souvent l'ARW aux jeunes ingénieurs comme le « flou de base » de leur estimation d'orientation . Il ne tient pas compte du mouvement de la plateforme. Même en laboratoire , avec un capteur parfaitement stable fixé à la table, l'ARW s'accumule. C'est ce qui la rend si fondamentale. Ce n'est pas un défaut de performance, c'est un phénomène physique.
Comment mesure-t-on concrètement l'ARW ?
L'analyse de variance d'Allan est la méthode de référence pour mesurer l'ARW.
Cette technique décompose différents types de bruit sur des intervalles de temps variables. Sur de courtes durées de moyennage, le bruit blanc d'Allan (ARW) se manifeste par une pente caractéristique de -½ sur un graphique log-log de l'écart d'Allan. Il s'agit de la signature du bruit blanc dans le signal de sortie de votre gyroscope, et il détermine la précision minimale de votre attitude.
Mais on ne peut pas se fier uniquement à la fiche technique.
Dans mon processus de travail, j'effectue systématiquement des tests statiques contrôlés sur une plateforme mécaniquement isolée, j'enregistre les données brutes du gyroscope et je génère mes propres graphiques d'Allan. Une pente nette sur une courte durée m'indique la stabilité du gyroscope. Si la pente est irrégulière ou bruitée, je sais que la précision annoncée de « 0,05°/√h » risque de ne pas être vérifiée en conditions réelles d'utilisation.
L'ARW n'est pas qu'un simple nombre, c'est une tendance que vous devriez observer dans des données réelles.
C'est pourquoi je considère ARW comme un élément à valider, et non comme un simple élément à citer. Si votre variante Allan ne correspond pas à la spécification, l'ensemble de votre architecture Fusion pourrait en subir les conséquences par la suite.
Pourquoi l'ARW est-il essentiel à la précision de l'IMU ?
Le bruit qui ne dort jamais
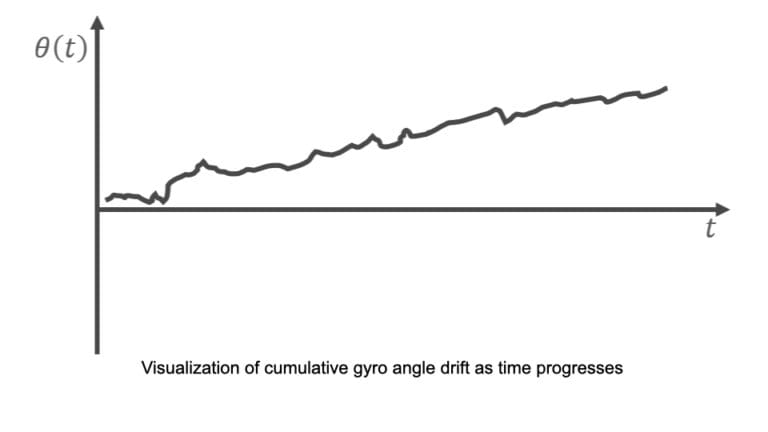
Contrairement aux erreurs déterministes comme le biais ou le facteur d'échelle, l'ARW introduit continuellement une incertitude dans l'estimation de l'orientation. Les gyroscopes mesurant la vitesse angulaire , et ces vitesses étant intégrées dans le temps fait sentir en quelques secondes sur les plateformes haute sensibilité .
Le plafond invisible de la navigation
La période de référence d'oscillation (ARW) limite la durée pendant laquelle votre centrale inertielle (IMU) peut fournir une orientation fiable en l'absence de corrections externes (GNSS ou magnétomètres). J'ai constaté que des filtres de Kalman parfaitement réglés perdent progressivement leur cap simplement parce que le gyroscope sous-jacent avait une ARW trop élevée pour la durée de la mission . Il ne s'agit pas d'un problème logiciel, mais d'une contrainte physique. Dans tous les systèmes inertiels que j'ai conçus, la connaissance de l'ARW me permet de prédire les défaillances de navigation. Et c'est un atout considérable.
En quoi l'ARW diffère-t-elle de l'instabilité de biais ?
| Marche aléatoire angulaire (ARW) | Instabilité de biais |
|---|---|
| Bruit transitoire. Apparaît instantanément dans le signal de sortie du gyroscope sous forme de petites fluctuations aléatoires. | Dérive à moyen et long terme. Une lente fluctuation du niveau de taux zéro au fil du temps. |
| Augmente avec √temps. Provoque une accumulation continue de l'erreur d'orientation. | Présente un plateau plat sur les graphiques de variance d'Allan — c'est la « bosse » que recherchent les ingénieurs. |
| Imprévisible mais circonscrit. Peut être modélisé statistiquement, mais non éliminé. | À variation lente. Souvent modélisée et partiellement compensée par des filtres. |
| Précision optimale à court terme. Particulièrement crucial dans les systèmes dynamiques et à évolution rapide. | Dominant en matière de précision à long terme. Essentiel dans des applications telles que la navigation inertielle de précision topographique ou la navigation de longue durée. |
Pourquoi cette confusion ?
L'instabilité de la marche aléatoire (ARW) et l'instabilité du biais provoquent toutes deux une dérive, mais de manières et à des échelles de temps différentes. Les ingénieurs novices en systèmes inertiels les confondent souvent , pensant que la dérive du biais est la seule source d'erreur de navigation. D'après mon expérience, c'est souvent l'ARW qui limite les performances lors des missions tactiques , notamment lorsque le temps de fonctionnement sans GNSS se mesure en minutes et non en heures.
Quelles sont les valeurs ARW typiques pour différentes IMU ?
Dans les projets concrets, je demande rarement « quelle est la meilleure centrale inertielle ? » — je demande « quelle est la plus faible consommation d'énergie apparente (ARW) que je puisse obtenir compte tenu de la taille, du poids et du budget ? » L'ARW est souvent la spécification qui indique discrètement si un capteur est de qualité grand public, tactique ou stratégique.
Voici comment j'ai constaté la répartition des ARW selon les classes de capteurs :
| Classe IMU | ARW typique (°/√h) | Là où ça doit être |
|---|---|---|
| MEMS grand public | 1 – 10 | Téléphones, objets connectés, robotique d'entrée de gamme |
| MEMS industriels | 0.1 – 1 | Drones équipés de GNSS, plateformes autonomes légères |
| MEMS tactiques | 0.05 – 0.1 | Drones de défense, stabilisation des armes, véhicules |
| FOG de qualité navigation | 0.001 – 0.01 | Secteurs maritime, aérospatial, ferroviaire, drones de longue durée |
| RLG stratégique | < 0.001 | Sous-marins, missiles balistiques intercontinentaux, systèmes militaires de haute sécurité |
Je considère l'ARW comme un filtre coupe-bande dans les décisions de conception.
Si mon système doit fonctionner 30 minutes sans GNSS et maintenir une précision de cap de 1°, les modules MEMS avec une précision de 0,2°/√h ne suffiront pas. Les modules MEMS tactiques pourraient à peine y parvenir. Si j'ai besoin de performances supérieures, c'est le FOG ou rien.
Et ensuite ?
Vous devriez maintenant bien comprendre ce qu'est la dérive liée à l'inertie (ARW), comment elle est mesurée et pourquoi elle est importante. Mais la théorie ne représente que la moitié du problème. Dans la deuxième partie de cette série, j'expliquerai comment l'ARW se manifeste dans les systèmes réels — de la dérive des drones aux missions inertielles — et comment les ingénieurs comme nous la contournent lors de la conception. Nous aborderons les aspects pratiques : les limitations logicielles, l'isolation mécanique, les stratégies de fusion et les seuils d'ARW critiques pour les applications critiques.
→ Passez à la partie 2 : Concevoir en tenant compte de l’ARW
