Les centrales inertielles (IMU) sont essentielles aux systèmes de navigation des missiles rôdeurs. Elles fournissent les données nécessaires au guidage précis du missile vers sa cible. Sans une centrale inertielle fiable, un missile aurait des difficultés à maintenir une trajectoire stable, ce qui pourrait compromettre sa mission.
Une centrale inertielle (IMU) est un dispositif qui mesure l'accélération, la vitesse et l'orientation d'un objet. Son rôle est essentiel pour les missiles de croisière afin de garantir la précision de leur trajectoire et leur capacité à atteindre leur cible.
Dans cet article, je détaillerai les composants essentiels qui constituent une centrale inertielle (IMU), les indicateurs clés pour les applications de missiles rôdeurs et quel type d'IMU est le mieux adapté à ces opérations à haut risque.
Table des matières
Qu'est-ce qu'une centrale inertielle (IMU) ?
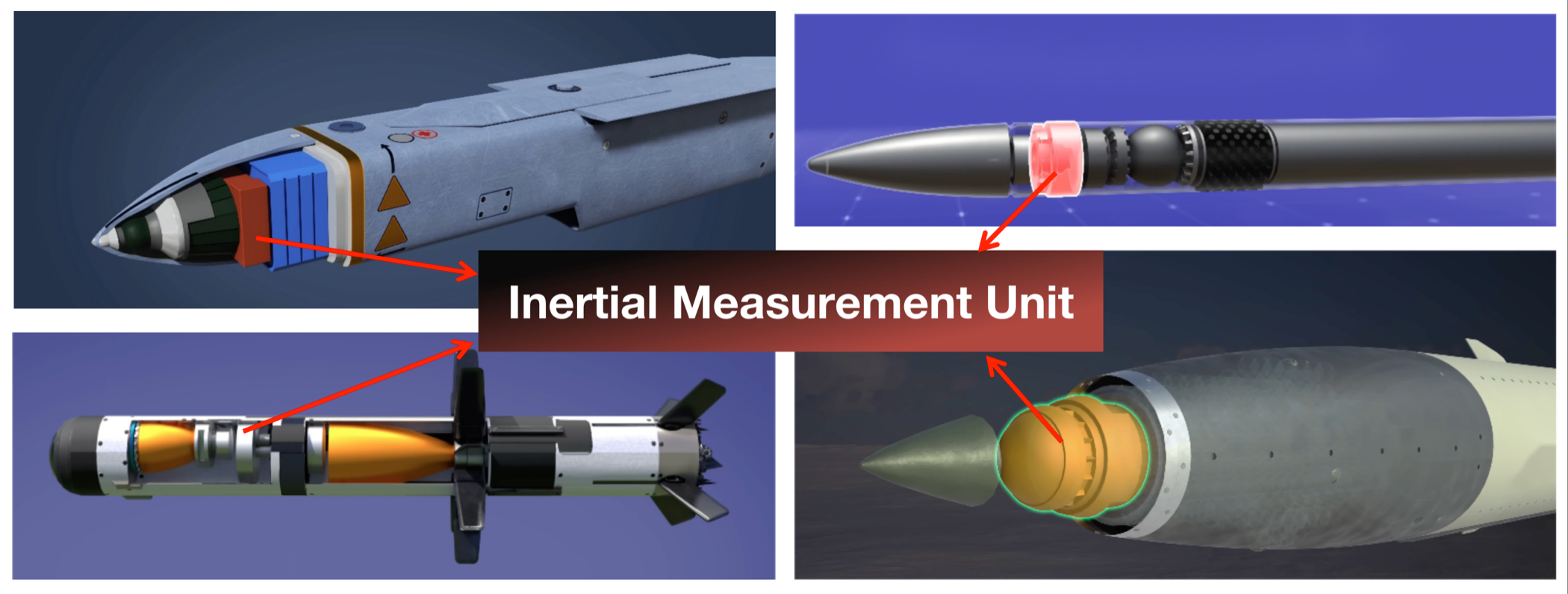
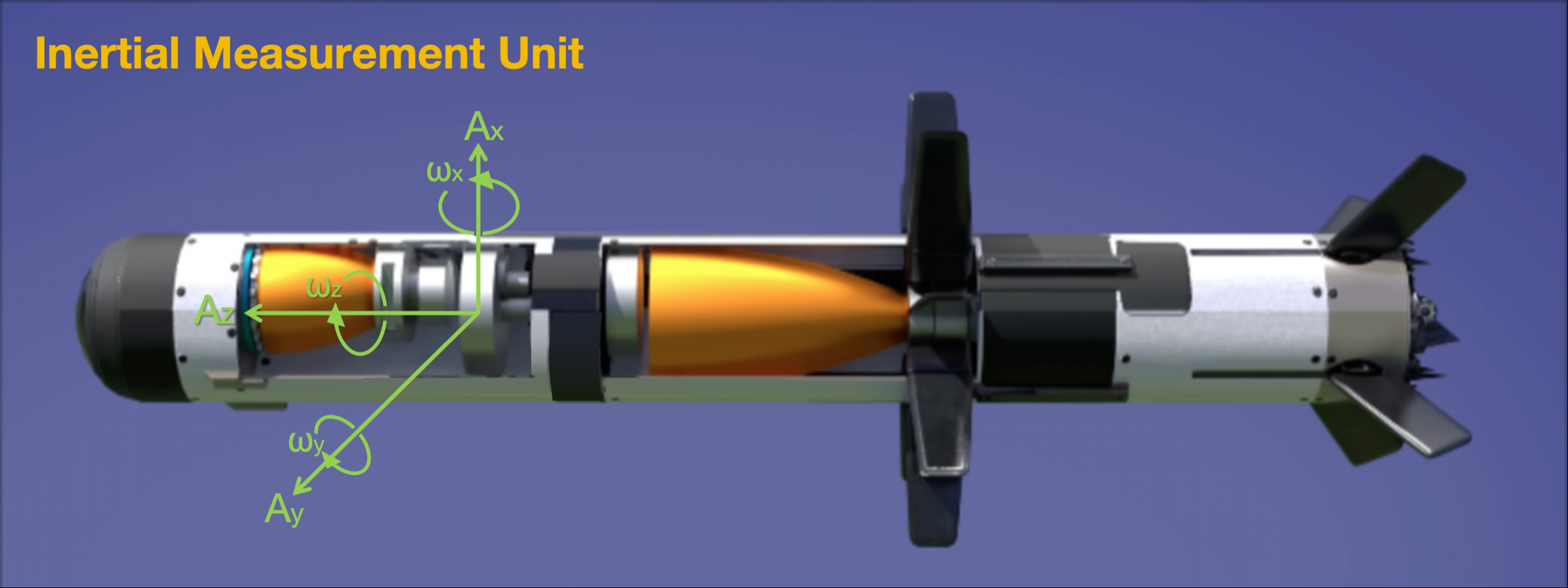
Une centrale inertielle (IMU) est un dispositif qui mesure l'accélération, la vitesse et l'orientation d'un objet. Elle fonctionne sans signal externe, ce qui la rend idéale pour les environnements où les signaux GPS sont peu fiables. À l'intérieur d'une IMU, on trouve généralement des accéléromètres et des gyroscopes. Ces capteurs fonctionnent de concert pour suivre le mouvement et la rotation, garantissant ainsi la précision de la trajectoire du missile.
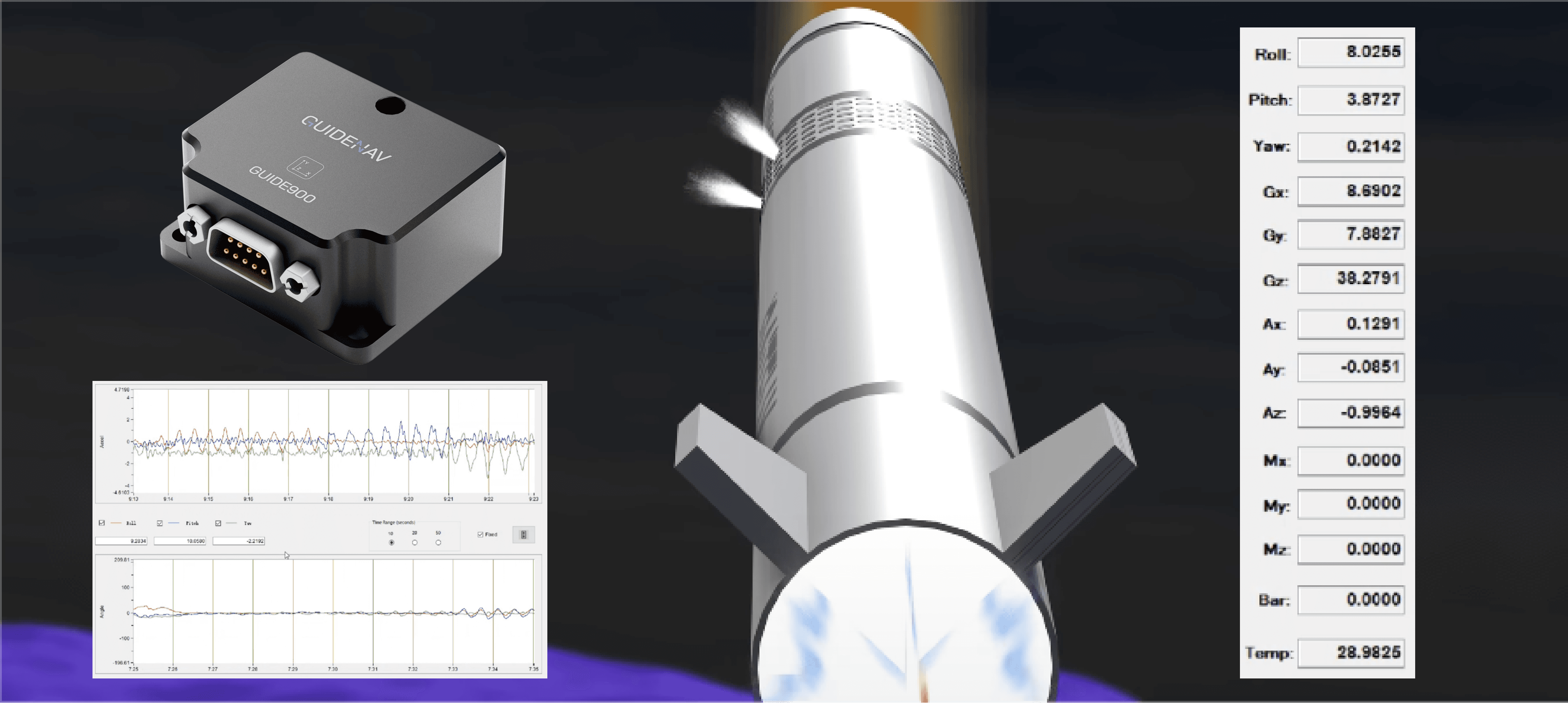
En tant qu'ingénieur spécialisé dans la navigation inertielle depuis plus de huit ans, je peux vous affirmer que le rôle clé de l'IMU est de fournir des données en temps réel sur la vitesse, la position et l'angle du missile. Cela permet au système de contrôle du missile d'ajuster sa trajectoire en continu. Ce niveau de précision est essentiel pour les vols de longue durée et les frappes ciblées .
Pourquoi les missiles rôdeurs dépendent-ils d'une centrale inertielle (IMU) ?
Les missiles rôdeurs sont conçus pour rester en vol pendant de longues périodes afin de surveiller une cible. À cette fin, une navigation précise est essentielle. L'unité de mesure inertielle (IMU) permet au missile d'ajuster sa trajectoire en continu, en compensant les variations de vitesse, de vent ou d'autres facteurs environnementaux. Sans données de position précises, le missile risque de dévier de sa trajectoire, ce qui pourrait entraîner l'échec de la mission, voire pire, un tir manqué.
Pour les systèmes de missiles, les données de haute précision ne servent pas seulement à guider le missile vers une position approximative. Elles garantissent sa capacité à manœuvrer avec précision et fiabilité sur de longues distances. L'unité de mesure inertielle (IMU) est essentielle pour atteindre ce niveau de précision. Sans elle, le missile serait incapable d'effectuer des corrections de trajectoire en temps réel, ce qui engendrerait des risques accrus, un gaspillage de ressources et une efficacité réduite des missions.
Paramètres clés des centrales inertielles des missiles de croisière
En matière d'IMU pour missiles rôdeurs, la précision est primordiale. Cependant, d'autres paramètres essentiels doivent être pris en compte. La stabilité du biais de l'IMU est cruciale, car toute dérive peut engendrer des erreurs au fil du temps. De même, le taux de dérive détermine la marge de déviation admissible avant qu'un réétalonnage ne soit nécessaire. L'IMU doit également fournir des mises à jour de données rapides avec une latence . La vitesse est essentielle pour les ajustements en temps réel.
| Paramètre | Description | Importance des missiles rôdeurs |
|---|---|---|
| Précision | La capacité de l'IMU à mesurer un mouvement précis. | Nécessaire pour maintenir le missile sur sa trajectoire lors de longs vols. |
| Stabilité du biais | La cohérence des relevés des capteurs au fil du temps. | Empêche la dérive progressive qui pourrait dévier la trajectoire du missile. |
| Taux de dérive | Le taux de variation des mesures de l'IMU. | Une faible dérive garantit une précision continue sans recalibrage. |
| Latence | Le délai entre l'entrée et la sortie du capteur. | Un traitement rapide est crucial pour des corrections de cap immédiates. |
Fort d'une longue expérience dans le domaine des systèmes de navigation inertielle, j'ai pu constater par moi-même à quel point une faible dérive et un temps de réponse rapide sont essentiels à la réussite d'une mission. Les centrales inertielles présentant une faible stabilité de biais ou une dérive importante ne peuvent tout simplement pas fournir les performances requises, notamment pour les systèmes de missiles qui nécessitent des ajustements rapides et fréquents.
Exigences de précision de l'IMU des missiles de croisière
La précision (stabilité du biais) de la centrale inertielle d'un missile rôdeur peut varier en fonction de la complexité de la mission et de la dépendance aux systèmes de navigation externes. Voici un résumé des de stabilité du biais pour différents scénarios :
1. Missions de frappe de haute précision (par exemple, attaques guidées de précision)
- Stabilité du biais : 0,1°/h à 0,1°/h
Raison:
- Une haute précision est requise pour un engagement précis des cibles, notamment dans le cadre de missions complexes impliquant des frappes de précision.
- L'IMU doit garantir un vol stable et un ciblage précis, notamment lors de l'approche finale.
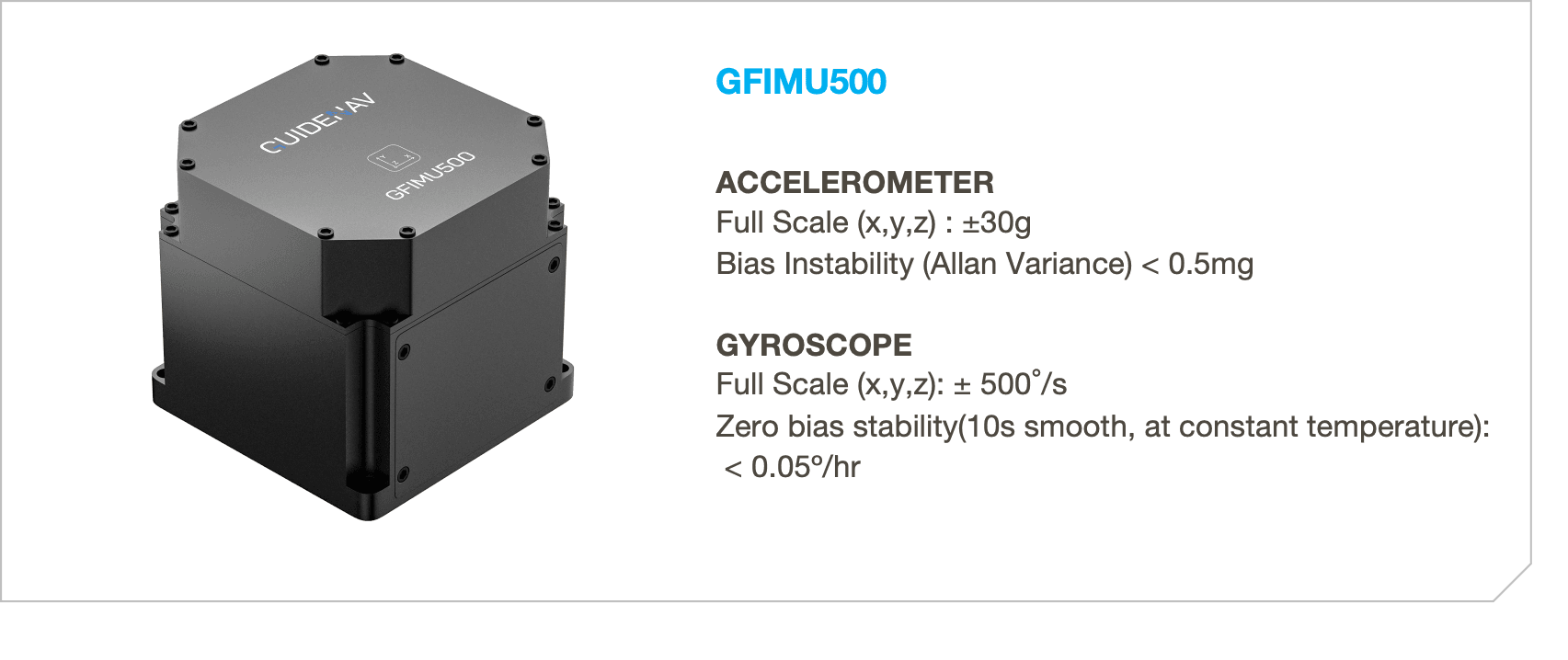
d' IMU recommandé : IMU à gyroscope à fibre optique
FOG recommandé : GFIMU 400, GFIMU 500

2. Missions de précision modérée (par exemple, frappes générales sur le champ de bataille)
- Stabilité du biais : 1°/h à 0,5°/h
Raison:
- Une précision modérée est nécessaire pour les missions générales sur le champ de bataille, où la cible peut être moins critique ou la zone d'engagement plus flexible.
- L'IMU peut être complétée par d'autres systèmes de guidage, tels que des systèmes visuels ou basés sur le GPS, afin de maintenir la précision.
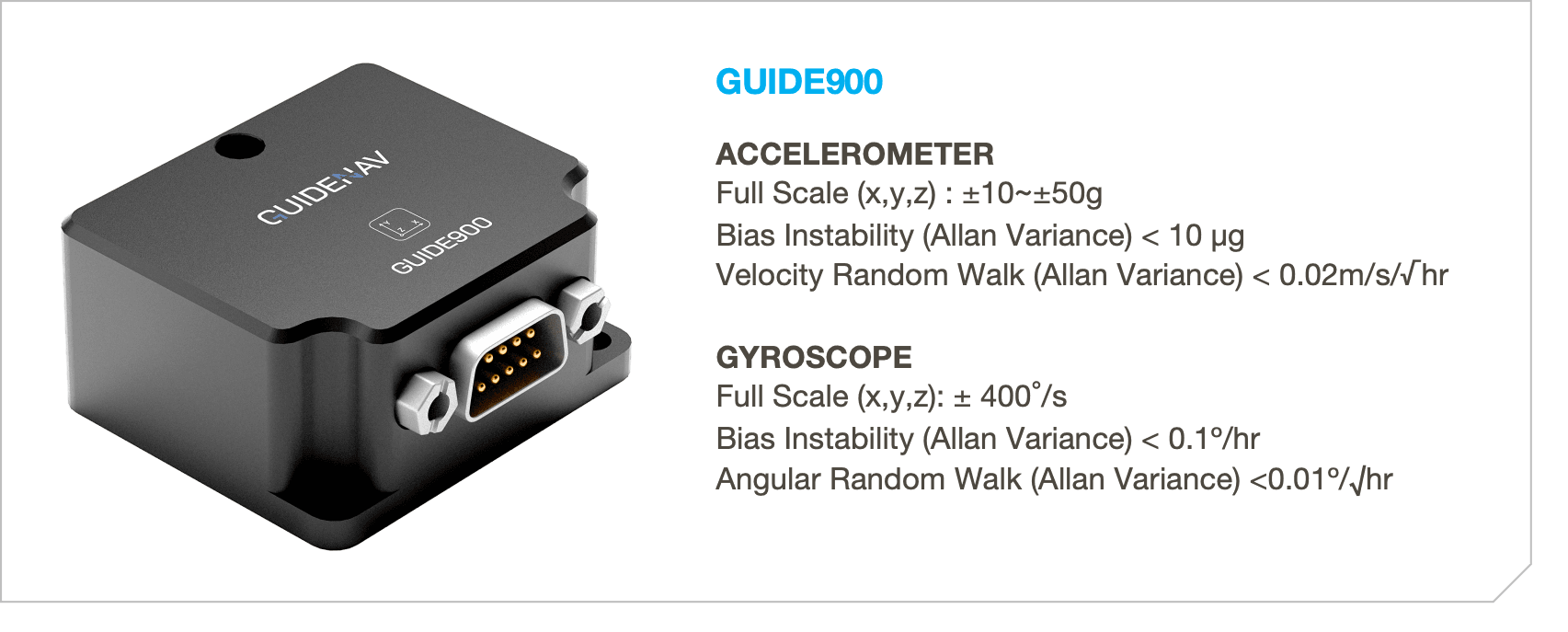
Type d'IMU recommandé : IMU MEMS ou IMU FOG (selon les exigences de la mission)
Modèle d'IMU MEMS recommandé : GUIDE900
3. Missions peu coûteuses ou plus simples (par exemple, attaquer des cibles de faible valeur ou mobiles)
- Stabilité du biais : de 5°/h à 2,5°/h
Raison:
- Pour les missiles rôdeurs à faible coût ou les cibles moins critiques, la précision de l'IMU peut être relâchée, notamment lorsque le temps de vol est court ou que la complexité de la mission est faible.
- Ces systèmes peuvent s'appuyer davantage sur la navigation de la plateforme (par exemple, un drone) ou sur de simples capteurs embarqués, réduisant ainsi le besoin d'IMU de haute précision.
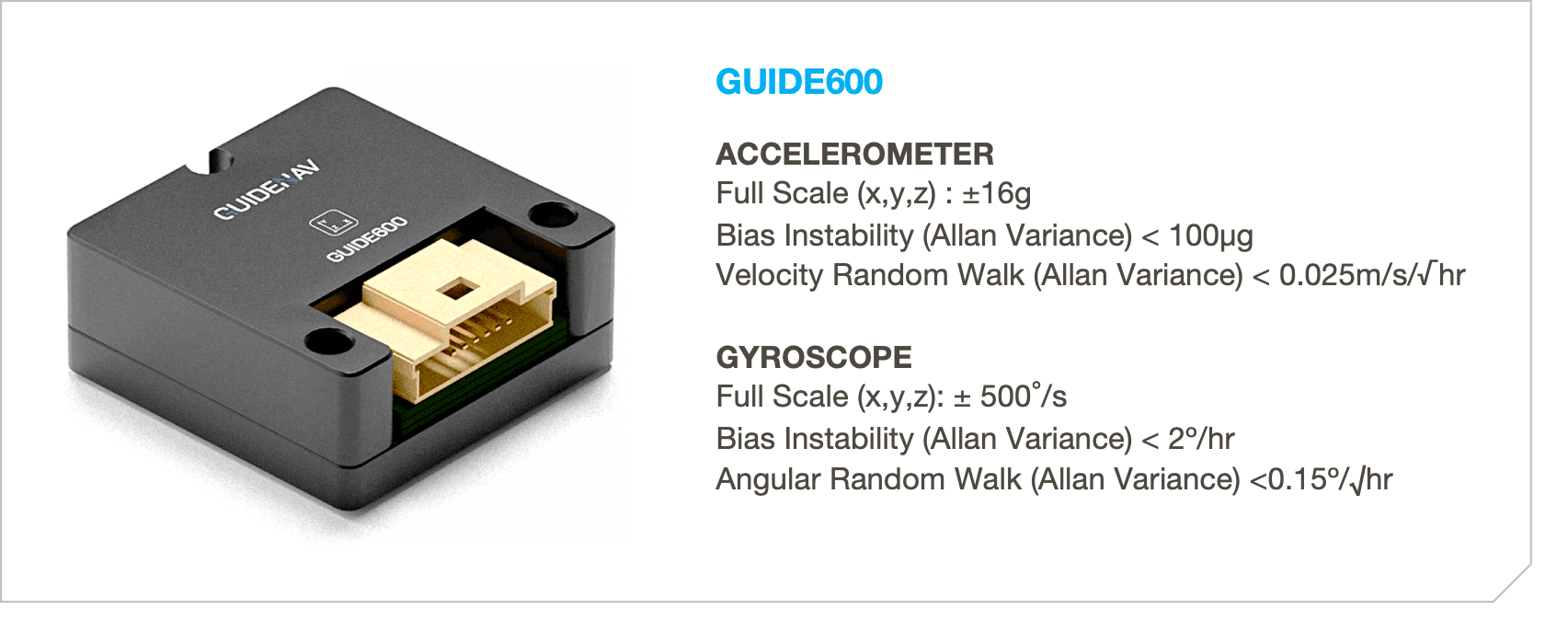
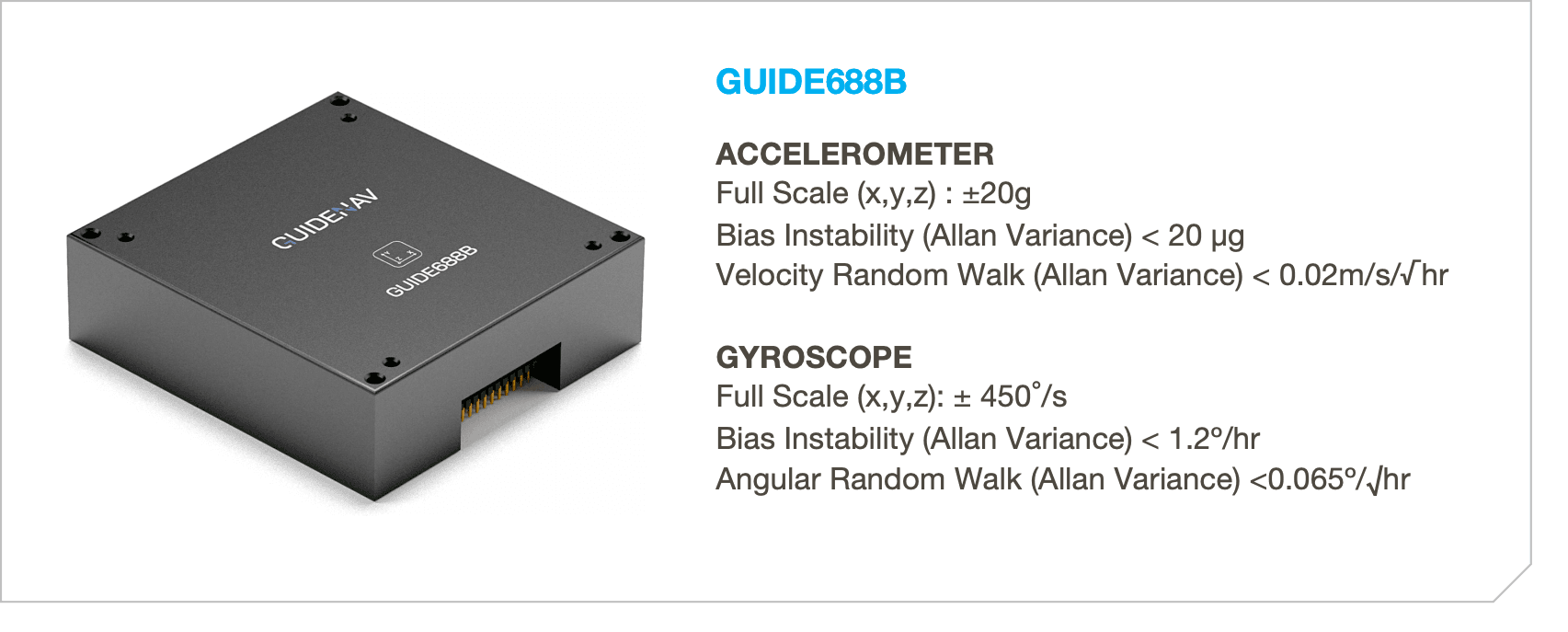
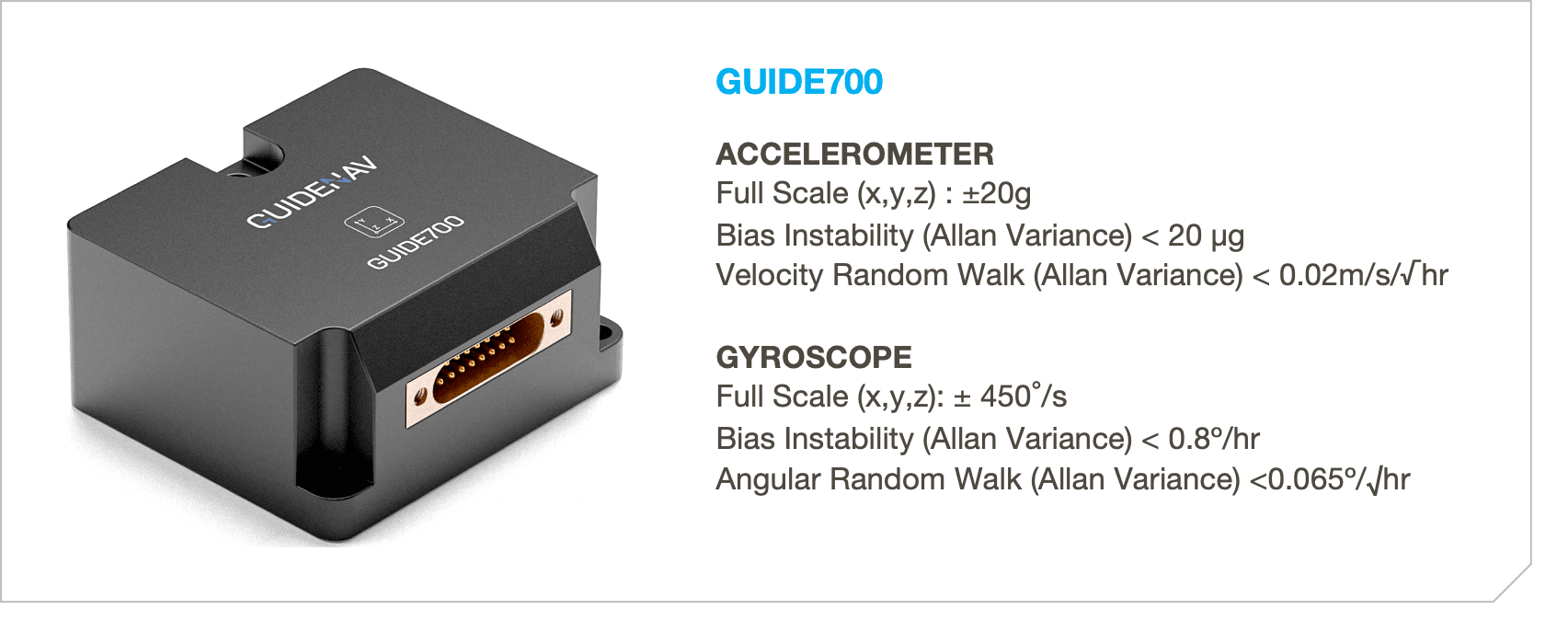
Type d'IMU recommandé : IMU MEMS
Modèles d'IMU MEMS recommandés : GUIDE700, GUIDE 688 B , GUIDE 600
4. Missions dépendantes des capteurs (par exemple, s'appuyant sur des capteurs externes pour le ciblage)
- Stabilité du biais : 5°/h à 5°/h
Raison:
- Pour les missions fortement dépendantes de capteurs externes (par exemple, visuels, radar ou GPS), la précision de l'IMU peut être réduite car les systèmes externes effectuent la majeure partie de la navigation et du guidage.
- L'IMU sert principalement de capteur complémentaire, la réussite de la mission dépendant essentiellement de données externes.
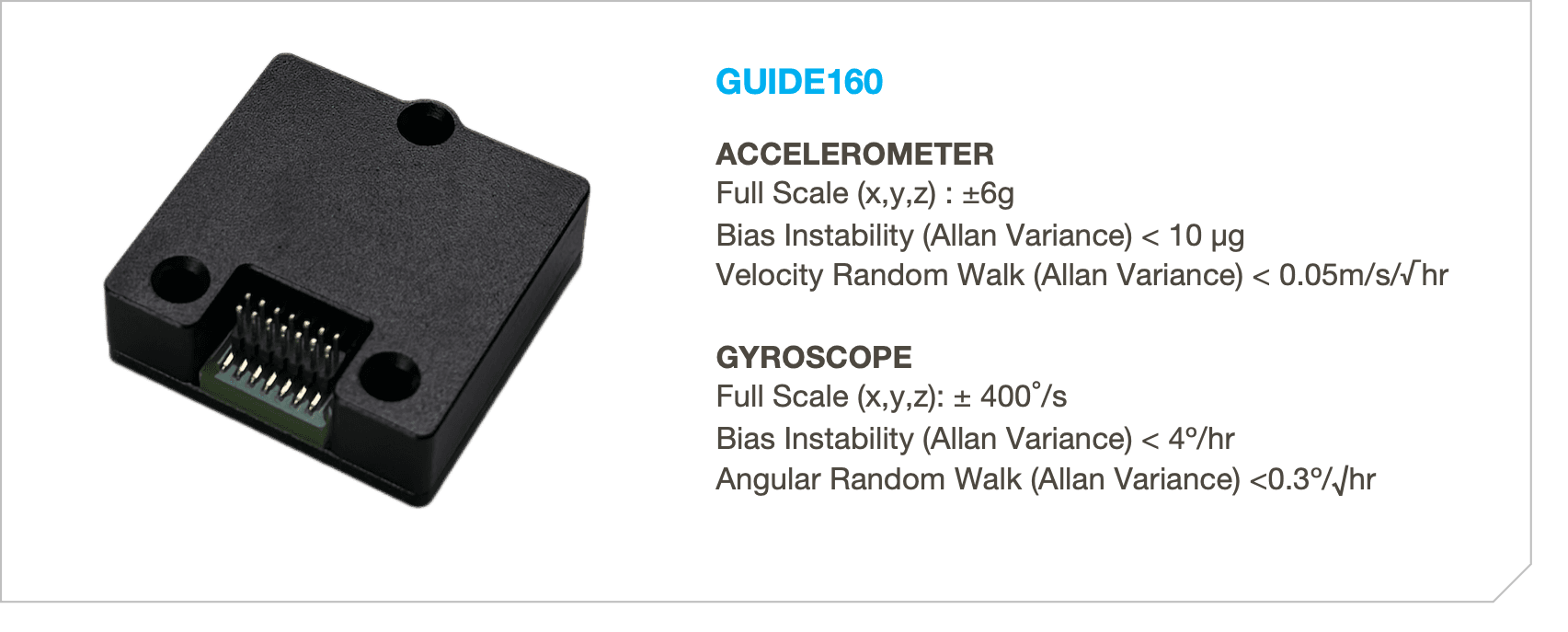
Type d'IMU recommandé : IMU MEMS
Modèle d'IMU MEMS recommandé : GUIDE160
Références
Pour les systèmes de missiles, les données de haute précision ne servent pas seulement à diriger le missile [^1] vers un emplacement général.
[^1] : L’exploration des mécanismes qui permettent de diriger le missile offre un aperçu des technologies de guidage de missiles avancées et de leur efficacité opérationnelle.
les indicateurs clés des applications de missiles rôdeurs [^2]
[^2] : Comprendre les indicateurs clés des applications de missiles rôdeurs peut fournir des informations sur leur efficacité opérationnelle et leur valeur stratégique.