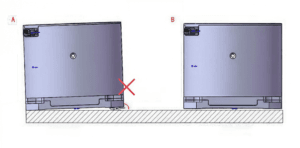
10 erreurs de conception commises par les ingénieurs lors de l'intégration des IMU
Les erreurs d'intégration d'IMU peuvent compromettre la fiabilité de la navigation. Du désalignement et des vibrations à un mauvais étalonnage et une dépendance excessive à la fusion des capteurs, les ingénieurs répètent souvent les mêmes erreurs. Dans ce guide, nous explorons les 10 erreurs les plus courantes en matière d'intégration d'IMU, expliquons leurs conséquences et proposons des solutions expertes que vous pouvez appliquer à vos propres projets.
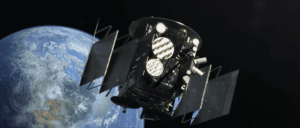
Technologie FOG dans le contrôle d'attitude des engins spatiaux : au-delà des limites des MEMS
Les gyroscopes à fibre optique surpassent les MEMS en offrant une stabilité à long terme, une résistance aux radiations et une précision fiable pendant des années. Ils sont indispensables pour les satellites, les constellations et les sondes spatiales lointaines, où la précision ne peut être compromise.
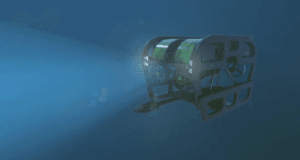
Comment la fusion multicapteurs redéfinit les systèmes de navigation inertielle
La précision de la navigation inertielle est finalement limitée par la qualité de la modélisation et de la compensation des erreurs des capteurs. De la dérive de biais à la marche aléatoire, une atténuation efficace nécessite une combinaison de conception matérielle, de routines d'étalonnage et de correction algorithmique en temps réel.

Top 10 des fournisseurs d'unités de mesure inertielle (IMU) FOG en 2025
Découvrez les 10 meilleurs fournisseurs d'IMU à fibre optique en 2025, dont Honeywell, Exail, GuideNav et bien d'autres. Comparez la dérive de polarisation, le contrôle des exportations et les performances tactiques pour les applications aérospatiales et de défense.
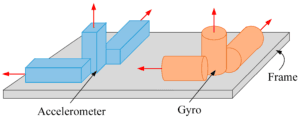
Sources d'erreur et techniques de compensation dans les systèmes de navigation inertielle
La précision de la navigation inertielle est finalement limitée par la qualité de la modélisation et de la compensation des erreurs des capteurs. De la dérive de biais à la marche aléatoire, une atténuation efficace nécessite une combinaison de conception matérielle, de routines d'étalonnage et de correction algorithmique en temps réel.
Explication des IMU MEMS 10 axes : composants, avantages et cas d'utilisation
Une IMU MEMS 10 axes représente une avancée significative par rapport aux capteurs traditionnels 3 ou 6 axes en combinant gyroscopes, accéléromètres, magnétomètres et baromètre dans un seul module compact. Cette fusion de capteurs plus riche permet non seulement le suivi des mouvements, mais aussi la connaissance absolue du cap et de l'altitude, essentielles à une navigation, un contrôle et une stabilité fiables dans des environnements complexes ou sans GPS.