
Comment les gyroscopes MEMS alimentent la robotique moderne : des AGV d’entrepôt aux bras humanoïdes
Les gyroscopes MEMS constituent le cœur inertiel de la robotique avancée : ils assurent une mesure précise de la vitesse angulaire, un suivi d’orientation en temps réel et un retour d’information fiable sur le mouvement, le tout dans des dispositifs compacts et économes en énergie. Ils sont indispensables pour une navigation stable et des mouvements précis, tant pour les AGV que pour les bras robotiques humanoïdes.

MEMS ou FOG pour la stabilisation des télémètres laser sur les plateformes blindées ? Voici ce que vous devez savoir
L’expérience pratique montre que les gyroscopes FOG surpassent les MEMS en termes de stabilité à long terme, d’immunité aux vibrations et de robustesse thermique dans les applications LRF embarquées sur véhicules. Les MEMS restent une solution viable pour les plateformes à espace restreint ou à budget limité, mais nécessitent une conception de compensation soignée.

Cycle de vie du gyroscope FOG : durabilité, étalonnage et maintenance
Dans les déploiements pratiques, maintenir la précision et la stabilité d'un gyroscope à fibre optique (FOG) nécessite plus qu'une conception de capteur avancée : cela exige un cadre de système calibré qui comprend une compensation thermique, une isolation mécanique et une maintenance tenant compte du cycle de vie.
Pourquoi les centrales inertielles à gyroscope à fibre optique (FOG) changent-elles la donne pour les applications de cardan ?
C’est pourquoi je fais confiance aux centrales inertielles gyroscopiques à fibre optique : elles offrent une précision et une robustesse inégalées, transformant les cardans instables et peu fiables en plateformes d’une stabilité à toute épreuve, quelles que soient les conditions.
Comment les solutions INS peuvent-elles surmonter les défis de navigation dans des environnements complexes ?
Les systèmes de navigation inertielle (INS) fonctionnent indépendamment des signaux externes en mesurant l'accélération et la vitesse angulaire grâce à des capteurs internes, ce qui les rend indispensables dans les environnements où les signaux GNSS sont bloqués ou peu fiables. Grâce à une fusion de capteurs sophistiquée, à la compensation des erreurs et à des corrections pilotées par l'IA, les INS assurent un positionnement continu et précis, même dans les situations les plus exigeantes.
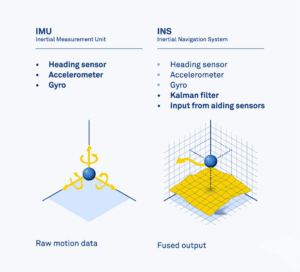
Quelle est la différence entre une centrale inertielle (IMU) et un système de navigation inertielle (INS) ?
Une centrale inertielle (IMU) mesure le mouvement, tandis qu'un système de navigation inertielle (INS) utilise les données de l'IMU pour calculer la position et l'orientation au fil du temps ; l'IMU est un capteur, l'INS est un système.