Les véhicules autonomes ne peuvent se déplacer en toute sécurité sans connaître leur position exacte. Or, un GPS classique, avec son erreur de 1 à 3 m, est bien trop approximatif pour les décisions de niveau de voie. Dans les canyons ou les tunnels urbains, les signaux disparaissent complètement, laissant le système « aveugle ». Pour atteindre une précision centimétrique, les plateformes de conduite autonome modernes s'appuient sur la fusion multicapteurs, combinant GNSS, IMU, LiDAR et perception visuelle, afin de garantir une localisation continue et fiable quelles que soient les conditions de conduite.
Les véhicules autonomes atteignent une précision au centimètre près grâce à l'intégration GNSS/INS, à la cartographie LiDAR et à la perception visuelle, les IMU de haute précision constituant le cœur de la localisation lorsque les signaux GPS échouent.
La localisation est l'épine dorsale invisible de la conduite autonome. Elle indique au véhicule sa position exacte, même lorsque les satellites disparaissent. En fusionnant les données de l'IMU, du GNSS, du LiDAR et des caméras, les systèmes modernes maintiennent un positionnement précis sur chaque route, tunnel et canyon urbain.
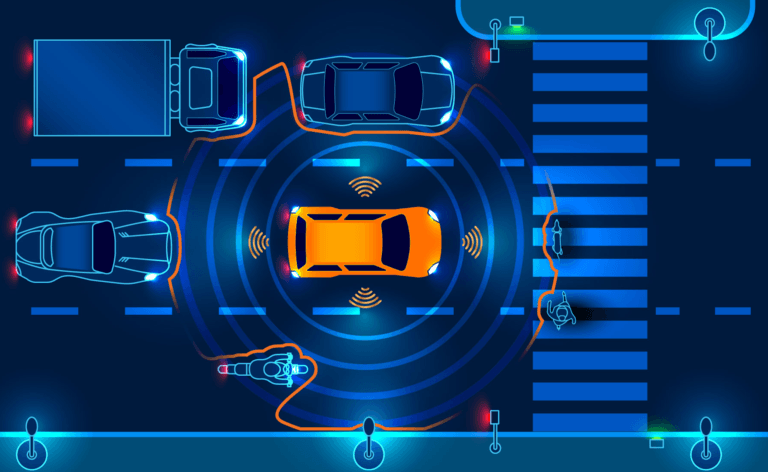
Table des matières
Les technologies de base derrière la localisation autonome
La localisation de la conduite autonome moderne combine quatre technologies de détection majeures, chacune jouant un rôle unique dans la perception et la navigation :
- GNSS (Global Navigation Satellite System) : fournit des coordonnées globales et une référence de position absolue.
- INS (Système de navigation inertielle) : suit le mouvement grâce à des accéléromètres et des gyroscopes, comblant les lacunes lorsque les signaux GNSS chutent.
- LiDAR (Light Detection and Ranging) : génère des cartes environnementales 3D pour une correspondance spatiale au centimètre près.
- Systèmes de vision : utilisez des caméras pour identifier les marquages au sol, les panneaux de signalisation et les points de repère pour la compréhension sémantique.
Ensemble, ces systèmes créent une architecture redondante et complémentaire qui assure une localisation précise dans des conditions routières, météorologiques et d'éclairage complexes. Cependant, parmi ces systèmes, le GNSS reste le point de départ, et ses limites révèlent l'importance de la fusion.
Pourquoi le GNSS seul ne peut pas rendre les voitures autonomes
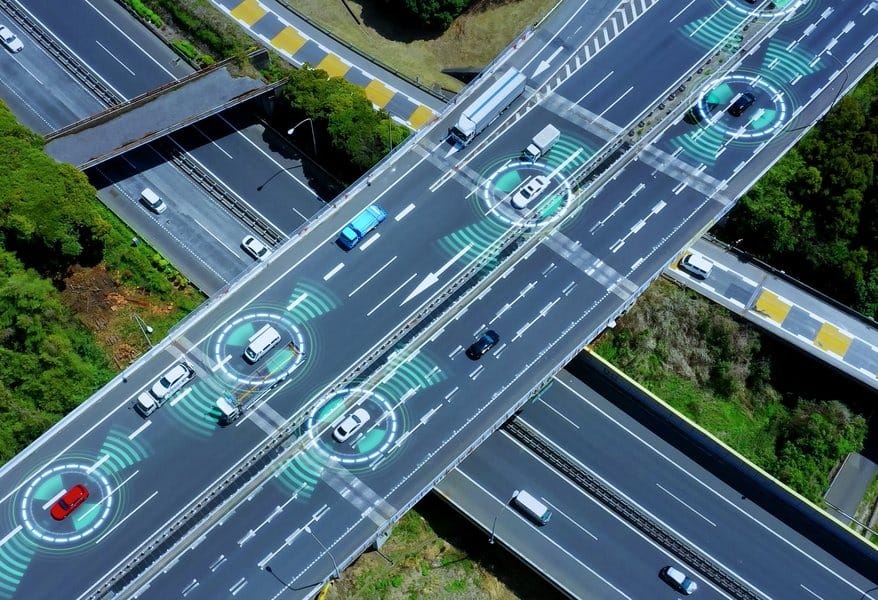
Le GPS standard n'offre qu'une précision de 1 à 3 m , ce qui est suffisant pour les téléphones, mais fatal pour les voitures autonomes . Même une légère dérive peut pousser un véhicule à franchir les lignes de la voie ou à mal interpréter un virage.
Dans ou les tunnels urbains , les signaux rebondissent ou disparaissent complètement, créant des sauts erratiques appelés erreurs multitrajets . Ces écarts rendent le GPS pur peu fiable, prouvant que les systèmes autonomes ont besoin de la fusion de capteurs pour une localisation continue au centimètre près .
Améliorer la précision du GNSS pour la conduite autonome
GPS standard , les systèmes autonomes utilisent des méthodes de correction GNSS telles que le RTK . En recevant des données d'erreur en temps réel des stations de référence , ces systèmes peuvent atteindre une précision de 5 à 10 cm , permettant ainsi un positionnement au niveau de la voie .
Cependant, le GNSS repose toujours sur une visibilité par ciel clair et une communication stable . Dans les tunnels ou les zones urbaines , les signaux se dégradent ou disparaissent, prouvant que le positionnement par satellite seul est insuffisant et doit être soutenu par l'INS localisation continue .
En cas de panne du GNSS, l'INS maintient le véhicule informé
Lorsque les satellites disparaissent, le système de navigation inertielle (INS) prend le contrôle. Grâce à une unité de mesure inertielle (IMU) , il suit le mouvement grâce à l'accélération et à la vitesse angulaire, permettant au véhicule de déterminer sa position à l'estime, même sans signaux externes.
Cette indépendance fait du SNI un pont à travers les tunnels, les passages souterrains ou les canyons urbains. Cependant, les erreurs s'accumulent au fil du temps, entraînant une dérive . Pour rester précis, le SNI doit être continuellement corrigé par le GNSS ou d'autres capteurs comme le LiDAR et les caméras .
À l'intérieur de l'INS : le cœur de la localisation inertielle
Le système de navigation inertielle (INS) est le cœur de la localisation autonome : une solution de navigation autonome qui permet aux véhicules de suivre leur position, leur vitesse et leur attitude même lorsque les signaux externes disparaissent.
Qu'est-ce qui constitue un INS ?
- Un ensemble de trois gyroscopes mesure la vitesse angulaire pour capturer le mouvement de rotation.
- Un ensemble de trois accéléromètres mesure l'accélération linéaire sur tous les axes.
- Ensemble, ces capteurs forment l' unité de mesure inertielle (IMU) , qui détecte en permanence chaque mouvement subtil du véhicule en temps réel.
Comment fonctionne l'INS
En intégrant les mesures de l'IMU, l'INS calcule l' attitude, la vitesse et la position par rapport à une référence initiale. Même en cas de disparition des signaux GNSS , le système continue d'estimer le mouvement par navigation à l'estime , fournissant ainsi une localisation fluide et ininterrompue.
Pourquoi la qualité de l'INS est importante
La précision d'un INS dépend des performances du capteur, notamment de la stabilité du biais , de la marche aléatoire angulaire (ARW) et de la compensation de température . Un INS de haute qualité maintient une précision inférieure au mètre pendant de longues périodes dans des environnements sans GNSS , garantissant une navigation fiable dans les tunnels, les villes et les routes fréquentées.
Fusion INS et GNSS : la référence absolue du secteur
Des atouts complémentaires
Aucun des deux systèmes ne peut fonctionner parfaitement seul.
Le GNSS fournit un positionnement global mais perd en fiabilité en cas d'obstruction du signal, tandis que l' INS offre un suivi continu des mouvements qui dérive progressivement au fil du temps.
En combinant les deux, les véhicules autonomes atteignent une précision absolue et une stabilité à court terme .
Fusion en action
filtrage de Kalman avancé , les données du GNSS et de l'INS sont fusionnées en temps réel :
- Lorsque le GNSS est disponible, il corrige en permanence la dérive de l'INS.
- Lorsque le GNSS est perdu, l'INS maintient des mises à jour de mouvement précises jusqu'au retour des signaux satellites.
Ce cycle de prédiction-mise à jour garantit une localisation fiable et transparente, même dans les tunnels ou les canyons urbains denses.
Norme industrielle
Cette intégration est devenue la pierre angulaire de la navigation autonome moderne .
système GNSS/INS bien calibré offre une précision centimétrique dans des conditions dynamiques, garantissant à la fois précision et fiabilité dans tous les environnements de conduite.
Des coordonnées à la réalité : comment fonctionnent les mathématiques de localisation
Une localisation précise repose sur la conversion des données entre deux référentiels : le référentiel du véhicule , qui se déplace avec la voiture, et le référentiel de la carte , fixé à la Terre. Grâce à des matrices de rotation ou quaternions , les données des capteurs, comme l'accélération et la vitesse angulaire, sont transformées en une référence globale. Sans cet alignement, même des capteurs précis pourraient mal interpréter le mouvement, entraînant dérive et erreur de positionnement.
Le rôle du LiDAR dans la précision centimétrique
Lorsque le GNSS perd sa visibilité, le LiDAR prend le relais.
Contrairement au positionnement par satellite, la localisation LiDAR utilise une numérisation 3D en temps réel pour « voir » l’environnement autour du véhicule.
Comment ça marche :
- Le LiDAR émet en continu des impulsions laser pour créer des nuages de points .
- Ces scans sont comparés à une carte haute définition à l'aide d'algorithmes tels que ICP (Iterative Closest Point) ou NDT (Normal Distribution Transform) .
- la position et l’orientation du véhicule avec une précision centimétrique.
Pourquoi c'est important :
Cette technique assure une localisation cohérente dans les tunnels , les canyons urbains ou les routes forestières , où les signaux GNSS ne sont pas fiables ou complètement perdus.
Voir c'est croire : localisation visuelle et cartographie au niveau des voies
Avec l'évolution des systèmes de conduite autonome, la localisation visuelle est devenue un complément indispensable au GNSS et au LiDAR. Si les satellites offrent une portée mondiale et le LiDAR assure la précision géométrique, les caméras ajoutent du contexte et du sens , permettant aux véhicules d'interpréter leur environnement à la manière des humains.
Rôle de la vision dans la localisation
Les capteurs visuels apportent une compréhension sémantique à la navigation autonome. Les caméras capturent les marquages au sol , les panneaux de signalisation et les limites de la route , offrant ainsi un contexte riche au-delà de la géométrie.
Processus de base
Les images capturées sont comparées à une carte haute définition . Des algorithmes analysent les caractéristiques visuelles et appliquent une estimation probabiliste (comme le filtrage particulaire) pour déterminer la position la plus probable du véhicule.
Principal avantage
Contrairement au LiDAR, qui mesure la forme, la localisation visuelle interprète le sens. Elle permet une précision au niveau de la voie et améliore la robustesse face aux variations d'éclairage, de circulation ou de conditions météorologiques.
Quels défis limitent encore la localisation dans le monde réel
Malgré la fusion avancée des systèmes GNSS, IMU, LiDAR et vision, la localisation en conditions réelles se heurte encore à des obstacles pratiques majeurs. Une précision parfaite en laboratoire ne garantit pas toujours des routes imprévisibles.
Environnements dynamiques
Les travaux routiers, les véhicules stationnés, les piétons et les objets temporaires créent des incohérences entre les données des capteurs en temps réel et les cartes prédéfinies. Ces incohérences peuvent entraîner des erreurs de positionnement à court terme.
Maintenance de la carte
Les cartes haute définition nécessitent des mises à jour constantes. Les changements saisonniers, la croissance de la végétation ou les modifications mineures du tracé des routes peuvent dégrader la précision de la localisation s'ils ne sont pas reflétés dans la base de données.
Calibrage du capteur
La précision de la fusion dépend de l'alignement précis des LiDAR, des caméras et des IMU. Même des décalages mécaniques ou des dilatations thermiques de l'ordre du millimètre peuvent entraîner un désalignement angulaire, introduisant ainsi une dérive cumulative au fil du temps.
Pourquoi la qualité de l'IMU définit l'avenir de la navigation autonome
L' unité de mesure inertielle (IMU) est le dernier rempart de la localisation autonome. Lorsque le GNSS et la vision perdent leur fiabilité, elle seule permet au véhicule de connaître son véritable mouvement. La stabilité de tout système de conduite autonome dépend de la précision avec laquelle l'IMU peut mesurer et maintenir l'orientation au fil du temps.
Les IMU haut de gamme se distinguent par leur stabilité de polarisation , leur marche aléatoire angulaire (ARW) et leur compensation thermique . Ces paramètres définissent la durée pendant laquelle le système peut maintenir une navigation à l'estime précise sans correction externe. Alors que les capteurs grand public peuvent dériver de quelques secondes, les IMU tactiques peuvent maintenir une précision inférieure au mètre pendant plusieurs minutes, ce qui fait la différence entre navigation et confusion.
À mesure que l'autonomie progresse, l'IMU demeure son fondement. Les futurs systèmes intégreront la détection inertielle à la fusion pilotée par l'IA et à la modélisation adaptative , mais la véritable fiabilité reposera toujours sur un principe fondamental : la qualité de la détection de mouvement détermine la fiabilité de la navigation.
