Les centrales inertielles (IMU) sont les outils silencieux de la navigation moderne. Elles détectent chaque mouvement, rotation et accélération, fournissant des données vitales aux drones, navires, véhicules terrestres et systèmes aérospatiaux. Pourtant, malgré leur rôle essentiel, les IMU sont souvent mal comprises ou mal utilisées. De petites erreurs lors de l'intégration peuvent se transformer en pannes opérationnelles massives, entraînant dérive, instabilité, voire perte de mission. En réalité, l'intégration des IMU ne se résume pas à une simple installation. Elle exige précision, discipline et prévoyance.
Les erreurs d'intégration d'IMU peuvent compromettre la fiabilité de la navigation. Du désalignement et des vibrations à un mauvais étalonnage et une dépendance excessive à la fusion des capteurs, les ingénieurs répètent souvent les mêmes erreurs. Dans ce guide, nous explorons les 10 erreurs les plus courantes en matière d'intégration d'IMU, expliquons leurs conséquences et proposons des solutions expertes que vous pouvez appliquer à vos propres projets.
Table des matières
Désalignement lors de l'installation
Erreur:
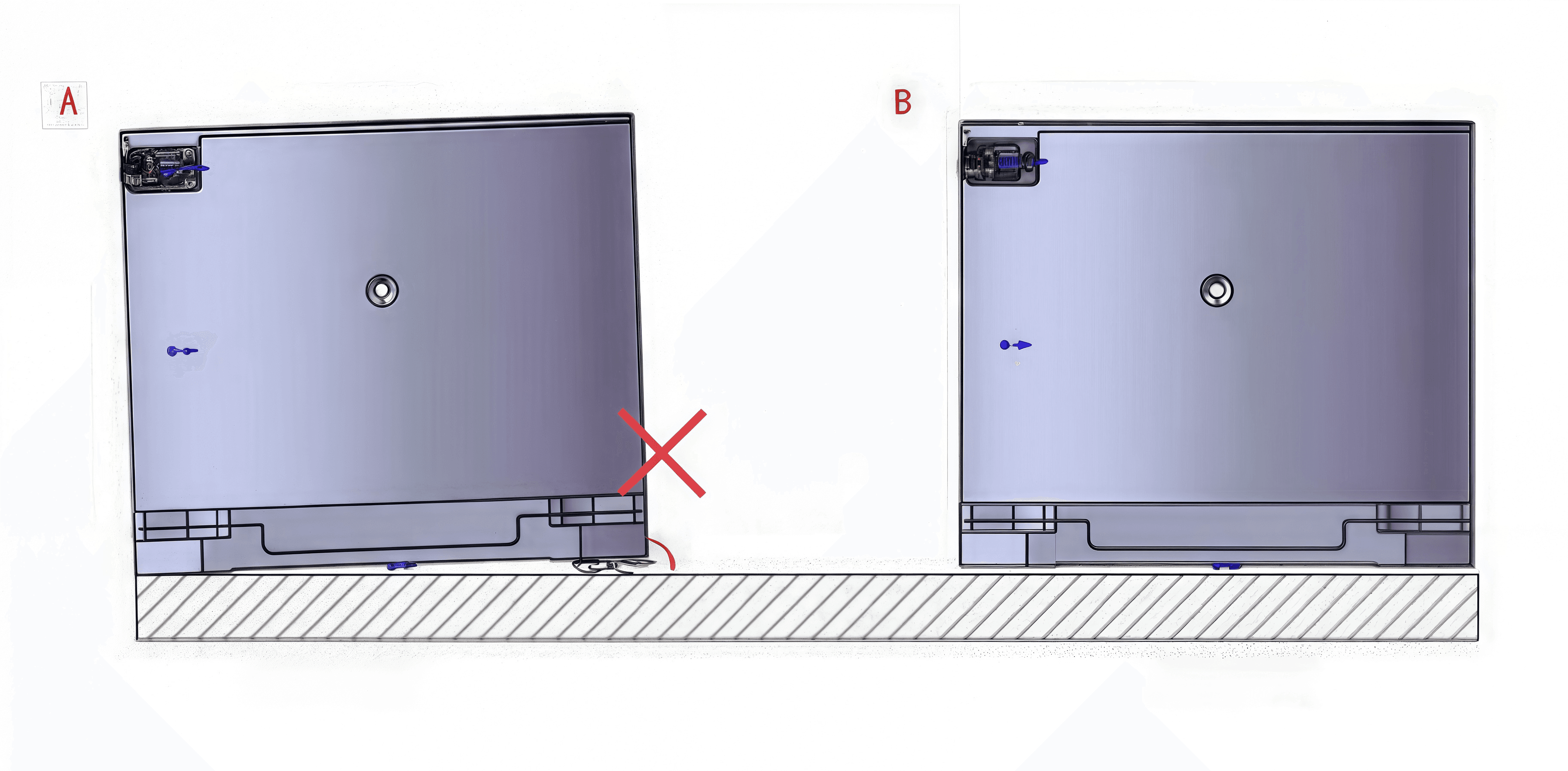
Les ingénieurs installent parfois des IMU « suffisamment » près du référentiel de la plateforme, sans alignement précis. Quelques degrés d'erreur peuvent paraître mineurs, mais en navigation, ces décalages se transforment en erreurs considérables.
Impact:
Des axes mal alignés entraînent un biais systématique dans les estimations d'attitude et de vitesse. Sur de longues missions, cela entraîne une dérive croissante, notamment lors d'opérations sans GPS où l'IMU est la seule source de vérité. Un drone peut lentement dévier de sa trajectoire, ou un véhicule robotisé peut mal évaluer son cap.
Réparer:
Définissez toujours les axes de référence dans la CAO et utilisez des outils de précision, tels que des gabarits d'alignement laser, lors de l'installation. Après le montage, effectuez un étalonnage d'alignement pour mesurer et compenser les légers décalages.
💡Conseil de pro : ne vous fiez jamais uniquement aux tolérances mécaniques : l’étalonnage post-intégration est votre filet de sécurité.
Ignorer l'isolation des vibrations
Erreur:
Montage d'une IMU directement sur des structures vibrantes telles que des bras d'hélice, des moteurs ou des châssis de véhicule, en supposant que les filtres internes du capteur compenseront.
Impact:
Les vibrations contaminent les signaux des accéléromètres et faussent les vitesses angulaires des gyroscopes. Il en résulte des sorties bruyantes, des filtres de navigation instables et une gigue visible dans les systèmes de stabilisation. Dans les avions ou les cardans, les vibrations peuvent nuire à la précision du pointage.
Réparer:
Utilisez des isolateurs de vibrations adaptés aux fréquences dominantes de votre plateforme. Combinez l'amortissement matériel et le filtrage numérique pour atténuer les effets résiduels. Validez les performances sous des charges de mission réelles, et pas seulement sur des bancs d'essai.
💡Conseil de pro : effectuez toujours une analyse du spectre de vibration de votre plate-forme avant de finaliser la conception de l'isolation.
Surplombant la gestion thermique
Erreur:
En supposant que la compensation de température intégrée de l'IMU résout tous les problèmes thermiques.
Impact:
Les missions réelles impliquent un échauffement rapide dû à l'électronique, aux gaz d'échappement des moteurs ou à des conditions de refroidissement. Ces phénomènes entraînent une instabilité des biais, une dérive du facteur d'échelle et une dégradation de la précision. Dans l'espace, les cycles thermiques peuvent être catastrophiques s'ils ne sont pas pris en compte.
Réparer:
Concevez le contrôle thermique au niveau du système. Les options incluent l'isolation des boîtiers, l'ajout de dissipateurs thermiques ou même de radiateurs contrôlés. Surveillez les capteurs de température embarqués pour suivre la stabilité tout au long du profil de mission.
💡Conseil de pro : testez les IMU sous des cycles thermiques réalistes, pas seulement sous des points de température statiques.
Choisir la mauvaise note de performance
Erreur:
Sélection d'une IMU basée uniquement sur le coût, la taille ou la disponibilité, sans tenir compte de la durée de la mission ou des exigences de précision.
Impact:
Les MEMS grand public peuvent sembler acceptables lors de tests courts, mais dérivent de manière incontrôlable lors de tests de plusieurs heures ou en l'absence de GPS. Les MEMS tactiques ou les IMU FOG sont nécessaires pour les missions sérieuses, mais les équipes les négligent souvent pour réduire le budget, ce qui entraîne des reconceptions ultérieures coûteuses.
Réparer:
Adaptez les performances de l'IMU (instabilité de polarisation, marche aléatoire, bande passante) aux besoins de la mission. Utilisez des MEMS grand public pour les drones de loisir, des MEMS tactiques pour les drones et les véhicules de défense, et des FOG pour les opérations maritimes ou aérospatiales.
| Type d'IMU | Mauvais usage courant | Application correcte |
|---|---|---|
| MEMS grand public | Choisi pour le coût | Robotique courte et non critique |
| MEMS tactiques | Négligé pour le prix | Drones, UGV, plateformes de défense |
| IMU BROUILLARD | Considéré comme excessif | Opérations maritimes, aérospatiales et sans GPS |
💡Conseil de pro : évaluez toujours le coût du cycle de vie d’un échec de mission par rapport au coût initial du capteur.
Mauvaise stratégie d'étalonnage
Erreur:
En s'appuyant uniquement sur l'étalonnage du fabricant, en supposant qu'il soit universellement valable.
Impact:
Les tolérances mécaniques, les erreurs de montage et les contraintes des connecteurs créent des biais spécifiques au système. Sans étalonnage secondaire, ces erreurs dégradent les performances de navigation et les résultats de fusion.
Réparer:
Effectuez l'étalonnage au niveau du système, comme les tests à six positions ou la caractérisation des tables de débit. Mettez à jour les tables d'étalonnage dans le micrologiciel et répétez-les régulièrement pour plus de cohérence.
💡Conseil de pro : considérez l’étalonnage comme une étape de maintenance récurrente et non comme un processus d’usine ponctuel.
Interface et gestion des données inadéquates
Erreur:
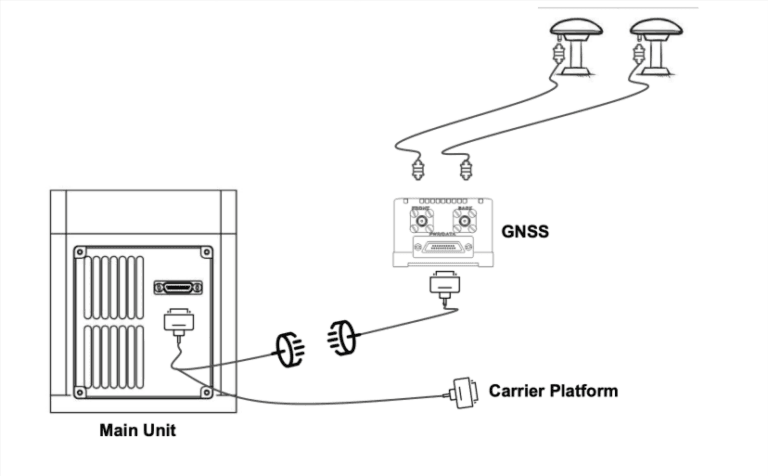
Taux d'échantillonnage mal configurés, latence ignorée ou échec de synchronisation des données avec d'autres capteurs.
Impact:
Même les IMU de haute qualité perdent leur fiabilité si leurs données sont retardées ou mal alignées. La fusion avec le GNSS, le LiDAR ou la vision échoue lorsque les horodatages ne correspondent pas.
Réparer:
Concevez des pipelines de données robustes. Utilisez des horodatages PPS ou matériels pour garantir la synchronisation. Validez la latence de bout en bout, du capteur au processeur.
💡Conseil de pro : considérez la synchronisation temporelle comme faisant partie de la qualité du capteur, et non comme une réflexion après coup.
Ignorer les interférences magnétiques et EMI
Erreur:
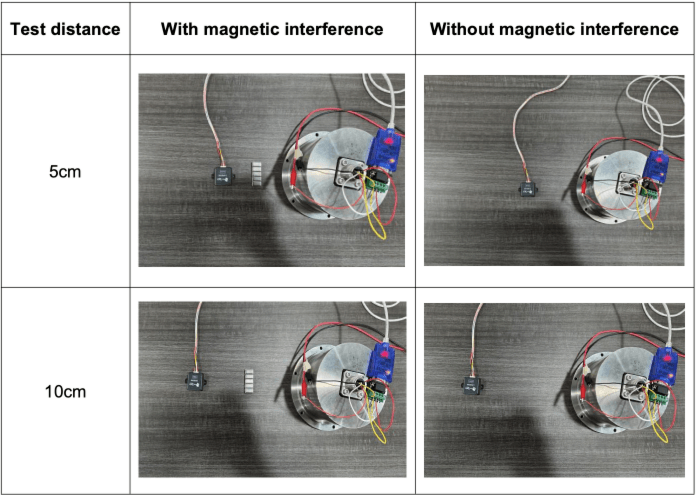
Installation d'IMU à proximité de moteurs, de câbles à courant élevé ou d'antennes RF.
Impact:
Les champs magnétiques déforment les signaux des accéléromètres et des gyroscopes. Le bruit électromagnétique se couple à l'électronique des capteurs, provoquant des signaux parasites. Ce phénomène est particulièrement fréquent sur les cardans de drones, dont la conception compacte rapproche dangereusement les capteurs des moteurs.
Réparer:
Éloignez les IMU des sources d'interférences électromagnétiques. Utilisez des boîtiers blindés, des câbles à paires torsadées et des méthodes de mise à la terre. Testez à pleine charge pour détecter les interférences cachées.
💡Conseil de pro : une conception mécanique propre peut résoudre les problèmes EMI plus efficacement qu'un filtrage complexe.
Ne pas tenir compte de la dérive à long terme
Erreur:
Validation des IMU avec des tests de courte durée, ignorant la dérive sur des heures ou des jours.
Impact:
L'instabilité du biais s'accumule, provoquant des kilomètres d'erreur de position. Les systèmes qui dépendent uniquement des IMU (sous-marins, engins spatiaux, drones brouillés par GPS) deviennent inutilisables.
Réparer:
Effectuez des tests d'endurance simulant la durée des missions. Choisissez des IMU tactiques ou FOG pour une stabilité de navigation à long terme.
💡Conseil de pro : évaluez toujours la dérive sur plus de 100 heures, pas seulement sur 10 minutes en laboratoire.
Dépendance excessive à la fusion de capteurs
Erreur:
En supposant que les filtres de Kalman ou la fusion basée sur l’IA puissent corriger les IMU faibles.
Impact:
Des entrées de capteur médiocres polluent simplement le filtre. Au lieu d'améliorer la précision, la fusion multiplie les erreurs : « Données erronées à l'entrée, données erronées à la sortie ».
Réparer:
Commencez avec des données IMU fiables. La fusion doit améliorer les performances, et non sauver des capteurs défectueux. Utilisez la redondance autant que possible pour vérifier les signaux.
💡Conseil de pro : une bonne IMU réduit la complexité du filtre et augmente considérablement la robustesse.
Sous-estimer la qualification environnementale
Erreur:
Tester les IMU uniquement dans des conditions de laboratoire et supposer que les résultats sur le terrain seront les mêmes.
Impact:
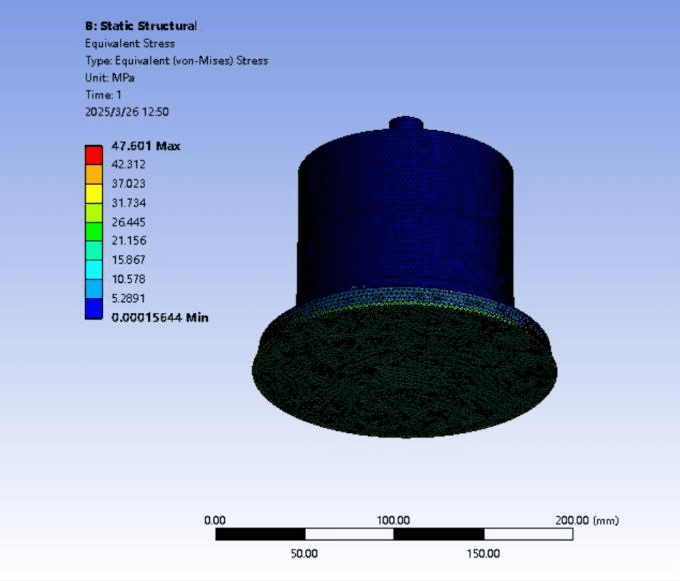
L'humidité, la poussière, les chocs et les conditions météorologiques extrêmes dépassent les spécifications commerciales. Sans qualification adéquate, les IMU échouent lors de missions critiques.
Réparer:
Sélectionnez des IMU testées selon les normes MIL-STD-810G, DO-160 ou équivalentes. Demandez des données de test, pas seulement des affirmations sur les fiches techniques.
💡Conseil de pro : demandez aux fournisseurs des rapports de qualification : les données réelles sont plus importantes que les promesses marketing.
Conclusion
L'intégration des IMU est à la fois un art et une science. Les algorithmes ou systèmes de contrôle les plus avancés ne peuvent compenser une installation, un étalonnage ou des tests inadéquats. En évitant les dix erreurs décrites ici, les ingénieurs peuvent exploiter pleinement le potentiel des IMU et concevoir des systèmes performants sur le terrain.
Chez GuideNav , nous proposons une large gamme d'IMU composée de gyroscopes MEMS / Fibre Optique / Mini Fibre Optique hautes performances et d'accéléromètres MEMS / Quartz , tous certifiés selon des normes environnementales rigoureuses. Nos produits sont conçus pour les drones, les systèmes maritimes, les véhicules de défense et les plateformes aérospatiales où la défaillance est inévitable. Si vous avez besoin d'une IMU prête à l'emploi, nos experts sont là pour vous accompagner dans votre intégration.