Après avoir travaillé avec des capteurs inertiels pendant plus de dix ans, j'ai pu constater par moi-même la rapidité avec laquelle les exigences système évoluent. Il y a quelques années, une IMU 6 axes (uniquement composée de gyroscopes et d'accéléromètres) suffisait à la plupart des tâches de navigation et de contrôle. Mais ce n'est plus le cas. Les plateformes actuelles exigent plus que de simples mouvements : elles nécessitent une orientation, une altitude et une perception de l'environnement. C'est pourquoi les IMU MEMS 10 axes sont devenues ma solution de prédilection pour les applications complexes. En ajoutant un magnétomètre et un capteur barométrique, nous obtenons deux dimensions de données supplémentaires : le cap absolu et le positionnement vertical. Ce ne sont pas de simples chiffres : ils permettent un contrôle stable dans les zones sans GNSS, une localisation précise en intérieur et une précision dans les environnements multicouches. Plus nous disposons de données, plus nous pouvons résoudre de problèmes.
Une IMU MEMS 10 axes représente une avancée significative par rapport aux capteurs traditionnels 3 ou 6 axes en combinant gyroscopes, accéléromètres, magnétomètres et baromètre dans un seul module compact. Cette fusion de capteurs plus riche permet non seulement le suivi des mouvements, mais aussi la connaissance absolue du cap et de l'altitude , essentielles à une navigation, un contrôle et une stabilité fiables dans des environnements complexes ou sans GPS.
Vous souhaitez comprendre le fonctionnement de chaque capteur et son importance ? Analysons ses composants.

Table des matières
Que signifie réellement « 10 axes » ?
En termes industriels, une IMU MEMS 10 axes combine généralement quatre types de capteurs dans un seul module compact :
- Gyroscopes à 3 axes pour mouvement de rotation
- Accéléromètres 3 axes pour l'accélération linéaire et l'inclinaison
- Magnétomètres 3 axes pour cap absolu
- Capteur de pression barométrique à 1 axe pour l'estimation de l'altitude
Cette combinaison offre une détection inertielle et environnementale complète de 10 degrés, donnant aux ingénieurs accès à une image plus riche et plus complète du mouvement de la plate-forme et de l'orientation spatiale, en particulier dans les environnements difficiles avec le GNSS.

Gyroscope – La vitesse angulaire au cœur des IMU MEMS à 10 axes
Le gyroscope est la base de toute centrale inertielle MEMS 10 axes et la stabilisation d'attitude en temps réel des plateformes à déplacement rapide. Dans les systèmes tactiques, une faible dérive et une grande réactivité sont essentielles.
Paramètres clés :
| Capteur | Paramètre | Description |
|---|---|---|
| Gyroscope | Plage angulaire | Mesure le mouvement de rotation complet sur 3 axes |
| Instabilité des biais | Prend en charge la correction de la dérive à long terme | |
| Performances en matière de bruit | Permet un suivi fluide et sans saccades | |
| Bande passante et débit de sortie | Données haute fréquence pour une réponse rapide |
Accéléromètre – Détection de mouvements linéaires et de vibrations pour une navigation de précision
L' accéléromètre d'une centrale inertielle 10 axes capture l'accélération dynamique et les forces gravitationnelles statiques selon trois axes. Cela permet une détection précise des mouvements, des vibrations et de l'orientation de l'inclinaison , particulièrement importante en navigation à l'estime ou sans GNSS.
Paramètres clés :
| Capteur | Paramètre | Description |
|---|---|---|
| Accéléromètre | Plage d'accélération | Détecte les chocs, les mouvements et l'inclinaison |
| Instabilité des biais | Permet une détection inertielle haute résolution | |
| Niveau de bruit | Réduit les faux déclencheurs de mouvement | |
| Bande passante et réponse | Convient aux environnements hautement dynamiques |
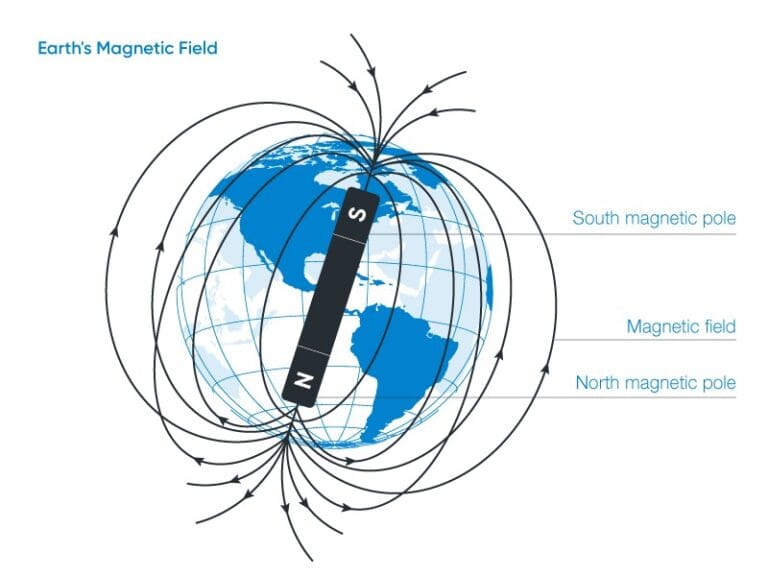
Magnétomètre – Cap absolu pour correction d'orientation à long terme
Le magnétomètre complète la détection gyroscopique en offrant une référence stable au champ magnétique terrestre, essentielle à l'estimation du cap lors de missions de longue durée. Il permet de corriger la dérive et d'obtenir une perception directionnelle , notamment en intérieur ou dans des environnements où le GPS est compromis.
Paramètres clés :
| Capteur | Paramètre | Description |
|---|---|---|
| Magnétomètre | Plage de champ magnétique | Couvre un large environnement d'exploitation |
| Résolution | Capture avec précision les petits changements de cap | |
| Caractéristiques du bruit | Prend en charge la correction d'orientation cohérente |
Baromètre – Conscience verticale pour la navigation 3D
Le capteur de pression barométrique fournit une de la centrale inertielle MEMS 10 axes , traduisant la pression atmosphérique en estimation d'altitude . Ceci est essentiel pour les drones d'intérieur, les plateformes VTOL et la robotique intelligente où les données d'élévation GNSS peuvent être indisponibles.
Paramètres clés :
| Capteur | Paramètre | Description |
|---|---|---|
| Baromètre | Plage de pression | Permet des scénarios opérationnels à grande altitude |
| Résolution | Détecte les petits changements d'altitude | |
| Stabilité des mesures | Assure un positionnement cohérent de l'axe Z |
Pourquoi les IMU 10 axes font-ils la différence dans les applications du monde réel ?
Si les IMU 3 ou 6 axes peuvent capturer les mouvements et l'orientation de base, elles sont souvent insuffisantes dans les environnements complexes et exigeants en matière de GNSS . Une IMU MEMS 10 axes intègre des capteurs gyroscopiques, accélérométriques, magnétométriques et barométriques, offrant une compréhension plus complète du mouvement et de l'environnement.
Ces données plus riches permettent :
- Correction de cap absolue par détection de champ magnétique
- Connaissance de la position verticale via la mesure de la pression atmosphérique
- Amélioration de la navigation à l'estime dans des conditions sans GPS ou en intérieur
- Plus grande robustesse contre la dérive, les vibrations et le bruit du système
Pour les plates-formes qui doivent penser, réagir et naviguer de manière indépendante, la détection à 10 axes fournit les dimensions supplémentaires que les IMU standard ne peuvent tout simplement pas couvrir.
Comment savoir si vous avez vraiment besoin d’une IMU 10 axes ?
Tous les projets ne nécessitent pas une IMU 10 axes complète, mais si votre application implique des environnements sans GPS, une mobilité verticale ou une stabilité de cap de longue durée, un système 10 axes peut être essentiel.
Vous devriez envisager de choisir une IMU MEMS 10 axes si :
- Vous avez besoin d’un cap absolu (pas seulement d’une rotation relative)
- Votre plateforme doit fonctionner à l'intérieur, sous terre ou dans des zones dégradées par le GNSS
- Vous avez besoin d'une estimation d'altitude ou d'une navigation multi-étages
- Votre système dérive au fil du temps en utilisant uniquement le gyroscope et l'accéléromètre
- Vous souhaitez activer une véritable perception spatiale 3D à partir d'un seul module de capteur
Si l’une des situations ci-dessus s’applique, la mise à niveau de 6 axes à 10 axes n’est pas une sur-ingénierie, mais une garantie de mission.

Où les IMU 10 axes sont-ils le plus couramment utilisés ?
Les centrales inertielle 10 axes ne sont pas réservées aux systèmes spécialisés : elles sont devenues essentielles sur de nombreuses plateformes modernes où mouvement, orientation et perception de l'environnement doivent fonctionner ensemble. Alors, dans quelles applications sont-elles le plus souvent utilisées ?
1. Véhicules aériens sans pilote (UAV)
Une centrale inertielle 10 axes permet aux drones de maintenir leur altitude grâce aux données barométriques, de corriger leur dérive de cap à l'aide d'un magnétomètre et de conserver le contrôle en cas de panne du GNSS ou d'espace aérien encombré. Ceci est essentiel pour le vol autonome, la stabilisation des VTOL et le retour à la base en toute sécurité dans des conditions de navigation dégradées.
2. Robots terrestres et UGV
Dans les tunnels, les sous-sols ou les installations dépourvues de GPS, les UGV s'appuient sur des systèmes inertiels pour naviguer. Grâce à une centrale inertielle à 10 axes, les robots acquièrent une perception verticale et une correction de cap, leur permettant de franchir des étages, des rampes ou des virages complexes avec une plus grande précision de positionnement, même en l'absence d'infrastructure cartographique.
3. Systèmes et munitions à guidage de précision
Les applications compactes et à haut niveau de résistance aux chocs, comme les munitions intelligentes, bénéficient d'un retour d'information complet sur 10 axes : gyroscopes pour l'orientation, accéléromètres pour l'accélération, magnétomètres pour la correction de trajectoire et baromètres pour le profilage d'altitude. Cela permet un ciblage précis, un contrôle adaptatif et un guidage stable en cas de perte GNSS ou de contre-mesures.
4. Cardans et charges utiles optiques
Pour les optiques stabilisées, la dérive de l'IMU peut dégrader la précision de pointage au fil du temps. Les IMU à 10 axes utilisent des magnétomètres pour la correction de l'azimut et des baromètres pour la référence d'inclinaison/élévation, gardant les caméras ou les capteurs verrouillés sur la cible avec une précision au niveau du pixel, même sur des plates-formes instables ou en mouvement.
5. Navigation intérieure et mobilité intelligente
Qu'elles soient installées sur des robots de livraison, des casques de réalité augmentée ou des trackers portables, les centrales inertielle 10 axes permettent un suivi complet de l'orientation et des mouvements 3D en intérieur. Les baromètres détectent les changements d'altitude entre les étages, tandis que les magnétomètres fournissent des indications d'orientation dans les environnements à ossature métallique, rendant la navigation intérieure plus précise et fiable, sans balises ni GNSS.
IMU 10 axes de GuideNav : conçu pour l'intégration
Chez GuideNav, nos IMU MEMS 10 axes associent un cœur 6 axes de qualité tactique à un magnétomètre et un baromètre intégrés, offrant une détection complète pour les environnements dynamiques sans GNSS. Chaque unité est étalonnée en température et alignée pour un déploiement en conditions réelles, et pas seulement pour des tests en laboratoire.
Nous prenons en charge une personnalisation approfondie (filtrage de sortie, réglage de la bande passante, adaptation de l'interface ou ajustements structurels) pour répondre aux exigences de votre plateforme.
Ce qui nous distingue, ce ne sont pas seulement les spécifications des capteurs, mais aussi notre façon de travailler :
- Support technique du prototypage au déploiement
- Interfaces et connecteurs personnalisables adaptés à votre plateforme
- Production stable avec continuité du cycle de vie
- Disponibilité favorable à l'exportation et sans ITAR
Si votre système dépend d'une orientation fiable et d'une connaissance de l'altitude, nos IMU 10 axes sont prêts à être intégrés.