نظرياً، يمكن لوحدة القياس بالقصور الذاتي (IMU) إجراء قياس المسافة المقطوعة - أي قياس المسافة التي قطعتها المركبة من خلال حساب تسارعها ومعدل دورانها الزاوي مع مرور الوقت. إلا أن هذا النوع من القياس، الذي يعتمد على القصور الذاتي فقط، غير عملي في الواقع. تكمن المشكلة في تراكم الأخطاء : فحتى الانحرافات الطفيفة في المستشعرات تُسبب انحرافاً في الموقع يزداد بشكل كبير مع مرور الوقت. في غضون ثوانٍ، ينحرف المسار المحسوب انحرافاً كبيراً عن الواقع.
بالنسبة للقيادة الذاتية والروبوتات، حيث يجب أن تظل دقة تحديد الموقع في حدود السنتيمترات، فإن وحدة القياس بالقصور الذاتي (IMU) وحدها لا يمكنها ببساطة توفير قياس المسافة الموثوق به.
يمكن لوحدة القياس بالقصور الذاتي (IMU) نظرياً حساب المسافة المقطوعة من خلال التكامل المزدوج، ولكن الانحياز والتشويش يتسببان في انحرافها بشكل كبير مع مرور الوقت. ولذلك، تعتمد أنظمة الملاحة في العالم الحقيقي على دمج بيانات وحدة القياس بالقصور الذاتي مع أنظمة الملاحة العالمية عبر الأقمار الصناعية (GNSS) أو تقنية الليدار (LiDAR) أو الكاميرات للحفاظ على الدقة والاستقرار.
يبدو نظام الملاحة بالقصور الذاتي بسيطًا - قياس الحركة وحساب المسافة. لكن في الواقع، حتى أخطاء المستشعرات الصغيرة تتراكم بسرعة وتؤثر سلبًا على الدقة. تُعد وحدة القياس بالقصور الذاتي (IMU) جزءًا أساسيًا من أي نظام ملاحة، لكنها لا تعمل بمفردها. تشرح هذه المقالة سبب فشل قياس المسافة باستخدام وحدة القياس بالقصور الذاتي وحدها، وكيف يُحوّل دمج المستشعرات هذه الوحدة إلى أداة موثوقة لتحديد المواقع بدقة.

جدول المحتويات
لماذا يمكن لوحدة القياس بالقصور الذاتي (IMU) نظرياً أن تقوم بقياس المسافة؟
تقوم وحدة القياس بالقصور الذاتي (IMU) بقياس التسارع ثلاثي المحاور والسرعة الزاوية ثلاثية المحاور .
من خلال التكامل المستمر لهذه الإشارات، يمكن للنظام نظرياً أن يحسب ما يلي:
- التوجيه (الوضع): عن طريق تكامل السرعة الزاوية.
- السرعة: عن طريق تكامل التسارع الخطي.
- الموضع: عن طريق تكامل السرعة مرة أخرى.
هذا هو المبدأ الأساسي لنظام الملاحة بالقصور الذاتي (INS)، وهو نظام ملاحة مستقل يعتمد كليًا على مستشعرات الحركة. في الحالة المثالية، مع معايرة دقيقة للمستشعرات وانعدام التشويش، يمكن لوحدة القياس بالقصور الذاتي (IMU) تحديد حركة المركبة باستمرار وتقدير مسارها بالنسبة لنقطة انطلاقها. ولذلك، نظريًا، يمكن لوحدة القياس بالقصور الذاتي (IMU) إجراء قياس المسافة دون أي مرجع خارجي.
لماذا يفشل عملياً: مشكلة تراكم الأخطاء
على الرغم من منطقية النظرية، إلا أن كل وحدة قياس بالقصور الذاتي (IMU) تعاني من أخطاء استشعارية متأصلة . تتضخم هذه الانحرافات والتشويشات الصغيرة بشكل كبير أثناء عملية التكامل المزدوج ، التي تحول التسارع إلى موضع. بمرور الوقت، حتى العيوب الصغيرة تتسبب في انحراف كبير ومتزايد بسرعة.
يزداد خطأ تحديد الموضع تربيعيًا مع مرور الوقت
إذا كان مقياس التسارع يحتوي على انحياز ثابت صغير b a (م/ث²)، فإن أخطاء السرعة والموقع المتراكمة تزداد بمرور الوقت على النحو التالي:
هذا يعني أن خطأ تحديد الموقع ينمو بشكل متناسب مع مربع الزمن . حتى الانحراف الطفيف يمكن أن يؤدي إلى انحراف كبير.
على سبيل المثال، افترض أن انحياز مقياس التسارع b a 0.01 م/ث 2 - وهي قيمة نموذجية جدًا لوحدات القياس بالقصور الذاتي MEMS ذات الجودة التجارية.
| وقت | خطأ في الموضع |
|---|---|
| ثانية واحدة | 0.005 متر |
| 10 ثوانٍ | 0.5 متر |
| 30 ثانية | 4.5 متر |
| 60 ثانية | 18 متر |
بعد دقيقة واحدة فقط (60 ثانية) من التشغيل، يمكن أن يصل خطأ تحديد الموقع المقدر إلى حوالي 18 مترًا ، وهو ما يتجاوز بكثير دقة تحديد الموقع المطلوبة للقيادة الذاتية ( عادةً < 0.1-0.3 متر ).
يؤدي انحراف الجيروسكوب إلى انحراف في الوضعية
انحراف بسيط غير ذي أهمية، لكنه مع مرور الوقت يؤدي إلى أخطاء ملحوظة في تقدير الوضع . بمجرد انحراف الاتجاه، يعجز جهاز القياس بالقصور الذاتي (IMU) عن الفصل الصحيح بين الجاذبية والحركة الحقيقية، إذ يفشل في "إزالة الجاذبية" من بيانات مقياس التسارع. عند حدوث ذلك، يُعامل متجه الجاذبية تسارع أفقي ، مما يجعل النظام يعتقد أن المركبة تتحرك حتى وهي ثابتة. يستمر هذا التسارع الزائف في التراكم ليُشكّل سرعة وهمية ، ويؤدي في النهاية إلى انحراف هائل في الموقع .
مصادر أخرى للأخطاء
إلى جانب التحيز، تتأثر وحدات القياس بالقصور الذاتي في العالم الحقيقي بمصادر خطأ متعددة تتضخم بمرور الوقت:
| مصدر الخطأ | تأثير |
|---|---|
| خطأ عامل المقياس | قياسات التسارع أو المعدل الزاوي بشكل غير صحيح. |
| عدم المحاذاة | تؤدي محاور الاستشعار غير المتعامدة إلى أخطاء في الإسقاط. |
| الانحراف الحراري | يتغير الانحياز مع تغير درجة الحرارة، مما يؤدي إلى تدهور المعايرة. |
| ضوضاء الاهتزاز | تتداخل الضوضاء الميكانيكية مع انحراف الموضع. |
| خطأ في المحاذاة الأولية | أخطاء بسيطة في سلوك الشركات الناشئة تؤدي إلى انحرافات طويلة الأمد. |
حتى العيوب الصغيرة، عند اجتماعها، تتسبب في تباين سريع في مخرجات الملاحة. عمليًا، يصبح قياس المسافة بالقصور الذاتي غير قابل للاستخدام في غضون ثوانٍ ، حتى مع أجهزة الاستشعار عالية الجودة.
تقييم الدقة: ما هي مدة صلاحية قياس المسافة باستخدام وحدة القياس بالقصور الذاتي فقط؟
حتى مع استخدام أجهزة استشعار متطورة، لا يمكن لنظام قياس المسافة بالقصور الذاتي أن يحافظ على دقته إلا لفترة قصيرة قبل أن يفقد السيطرة. ونظرًا لأن خطأ تحديد الموقع يزداد تربيعيًا مع مرور الوقت، فإن مدة التشغيل الموثوق تعتمد بشكل أساسي على جودة وحدة القياس بالقصور الذاتي (IMU) واستقرار انحيازها.
| رتبة IMU | التحيز النموذجي | خطأ في تحديد الموضع (10 ثوانٍ) | خطأ في تحديد الموضع (60 ثانية) | الاستخدام العملي |
|---|---|---|---|---|
| فئة المستهلك | > 0.01 م/ث² | > 0.5 متر | > 18 م | غير قابل للاستخدام تمامًا |
| درجة صناعية | ~ 0.001 م/ث² | حوالي 5 سم | حوالي 1.8 متر | يُستخدم للاختبارات القصيرة فقط |
| مستوى الملاحة | < 0.0001 م/ث² | حوالي 0.5 سم | حوالي 18 سم | دقيق لبضع ثوانٍ؛ لا يزال بحاجة إلى دمج |
| عيار تكتيكي | منخفض للغاية | قابل للتحكم | بضعة أمتار | مناسب للاستخدامات العسكرية / الفضائية؛ تكلفة عالية |
حتى وحدات القياس بالقصور الذاتي (IMUs) عالية الدقة لا يمكنها تجنب الانحراف إلى الأبد. ولهذا السبب، تعتمد الأنظمة المستقلة الحديثة دائمًا على دمج البيانات الحسية - أي الجمع بين بيانات وحدات القياس بالقصور الذاتي وبيانات أنظمة الملاحة عبر الأقمار الصناعية (GNSS) أو تقنية الليدار (LiDAR) أو المدخلات البصرية - للحفاظ على الدقة والاستقرار على المدى الطويل.
دور وحدة القياس بالقصور الذاتي في الملاحة الحديثة - دمج البيانات الحسية في جوهرها
على الرغم من أن وحدة القياس بالقصور الذاتي (IMU) لا تستطيع القيام بقياس المسافة بشكل مستقل، إلا أنها تلعب دورًا لا غنى عنه في أنظمة الملاحة الحديثة. فبدلاً من أن تكون المصدر الرئيسي لتحديد الموقع، تعمل كعمود فقري عالي التردد يعزز ويثبت عمل المستشعرات الأخرى.
تقدير الحركة عالي التردد
تعمل وحدات القياس بالقصور الذاتي (IMUs) بترددات تتراوح من مئات إلى آلاف الهرتز ، وهي أسرع بكثير من أنظمة الملاحة عبر الأقمار الصناعية (GNSS) أو تقنية الليدار (LiDAR) أو الكاميرات.
يتيح معدل التحديث العالي هذا التقاط الحركة السريعة وسد الفجوات بين أجهزة الاستشعار الأبطأ - مما يوفر وعيًا سلسًا ومستمرًا بالحركة لنظام الملاحة بأكمله.
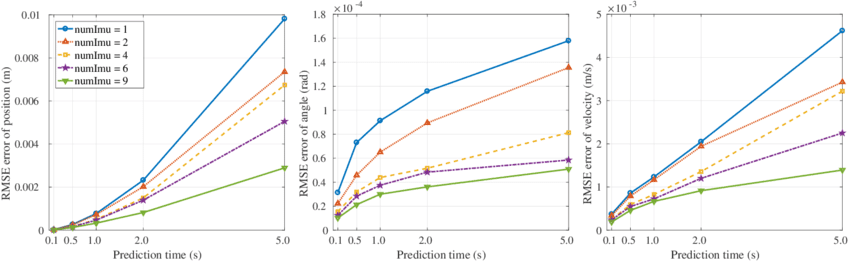
التنبؤ قصير المدى والتنعيم
عندما تُفقد إشارات نظام الملاحة العالمي عبر الأقمار الصناعية (GNSS) - داخل الأنفاق، أو تحت الجسور، أو في المناطق الحضرية المكتظة - توفر وحدة القياس بالقصور الذاتي (IMU) حسابًا تقريبيًا قصير المدى للحفاظ على مسار مستمر.
يتنبأ بحالة النظام (الموقع، السرعة، الاتجاه) لبضع ثوانٍ، مما يضمن انتقالات سلسة حتى تصبح القياسات الخارجية متاحة مرة أخرى.
إن قدرة الربط هذه تجعل وحدة القياس بالقصور الذاتي (IMU) ضرورية للملاحة القوية في البيئات التي لا تتوفر فيها أنظمة الملاحة عبر الأقمار الصناعية (GNSS) .
جوهر دمج المستشعرات
في تحديد المواقع الحديث، تعمل وحدة القياس بالقصور الذاتي (IMU) كمركز ديناميكي لأنظمة دمج البيانات متعددة المستشعرات. توفر بياناتها بالقصور الذاتي عالية السرعة معلومات مستمرة عن الحركة، بينما تعمل القياسات منخفضة السرعة ولكن الخالية من الانحراف من مستشعرات أخرى - مثل نظام تحديد المواقع العالمي عبر الأقمار الصناعية (GNSS) أو نظام LiDAR أو الكاميرات - على تصحيح الأخطاء المتراكمة باستمرار، مما يحافظ على استقرار ودقة الملاحة.
| طريقة الصهر | مجموعة أجهزة الاستشعار | طلب |
|---|---|---|
| اقتران GNSS/IMU فضفاض أو محكم | RTK-GNSS + IMU | الملاحة البرية أو الجوية عالية الدقة |
| تحديد الموقع البصري بالقصور الذاتي (VIO) | كاميرا + وحدة قياس القصور الذاتي | تقنية SLAM، والطائرات بدون طيار، والروبوتات |
| نظام تحديد المواقع بالقصور الذاتي بتقنية الليدار (LIO) | LiDAR + IMU | القيادة الذاتية، رسم الخرائط |
| مخطط العوامل أو دمج مرشح كالمان | مستشعرات متعددة + وحدة قياس القصور الذاتي | تقدير الحالة المتكامل |
خاتمة
يمكن لوحدة القياس بالقصور الذاتي (IMU) وحدها تقدير الحركة نظرياً، ولكن عملياً تتزايد أخطاؤها بسرعة كبيرة تجعلها غير مجدية. حتى الانحرافات الطفيفة تتسبب بسرعة في انحراف الموقع عدة أمتار في غضون ثوانٍ.
ومع ذلك، تظل وحدة القياس بالقصور الذاتي (IMU) أساسية، فهي توفر بيانات حركة عالية التردد لا تستطيع أجهزة الاستشعار الأخرى توفيرها. وعند دمجها مع أنظمة الملاحة عبر الأقمار الصناعية (GNSS) أو تقنية الليدار (LiDAR) أو الكاميرات، تصبح جوهر نظام ملاحة مستقر ودقيق.
