في عملي على تطوير أنظمة الملاحة، وجدتُ أن الموثوقية الحقيقية تنبع من الاستقلالية، لا من الاعتماد على إشارات خارجية. ولهذا السبب تلعب أنظمة الملاحة بالقصور الذاتي (INS) دورًا بالغ الأهمية: فهي تعمل كليًا على القياسات الداخلية، موفرةً ملاحة متسقة ومستمرة عبر نطاق واسع من البيئات، بدءًا من المركبات ذاتية القيادة وصولًا إلى منصات الفضاء الجوي.
الذاتي (INS) الموقع والسرعة والاتجاه باستخدام أجهزة استشعار الحركة الداخلية فقط، مما يتيح الملاحة الدقيقة عبر مجموعة واسعة من التطبيقات - بما في ذلك الأنظمة المستقلة والمنصات تحت الماء وعمليات الدفاع ذات الأهمية البالغة.
قبل اختيار نظام معلومات متكامل لتطبيقك، من المفيد بناء فهم واضح لمبادئ عمله وأنواع أنظمته.
جدول المحتويات

ما هو نظام الملاحة بالقصور الذاتي (INS)؟
نظام الملاحة بالقصور الذاتي (INS) هو نظام متكامل يستخدم مستشعرات حركة داخلية - عادةً ما تكون مقاييس تسارع وجيروسكوبات - لحساب موقع المنصة وسرعتها واتجاهها باستمرار في الفضاء ثلاثي الأبعاد. ولأنه لا يعتمد على أي مراجع خارجية، فإن نظام الملاحة بالقصور الذاتي ذو قيمة خاصة في البيئات التي تتطلب ملاحة ثابتة ومتواصلة، بما في ذلك التطبيقات تحت الماء وتحت الأرض والتطبيقات الدفاعية عالية الديناميكية.
ما هي المكونات الأساسية لنظام الملاحة بالقصور الذاتي؟
في تجربتي في تصميم حلول أنظمة الملاحة بالقصور الذاتي، يبدأ كل نظام بثلاثة مكونات أساسية: الجيروسكوبات، ومقاييس التسارع، ومعالج الملاحة. ولتحسين الدقة والاستقرار، غالبًا ما نُدمج مستشعرات إضافية - مثل مستقبلات نظام تحديد المواقع العالمي (GNSS)، ومقاييس المغناطيسية، ومقاييس الارتفاع البارومترية - لدمج البيانات الحسية المتقدمة. تُمكّن هذه البنية نظام الملاحة بالقصور الذاتي من الحفاظ على تتبع موثوق للحركة في بيئات متنوعة وصعبة.

الجيروسكوبات
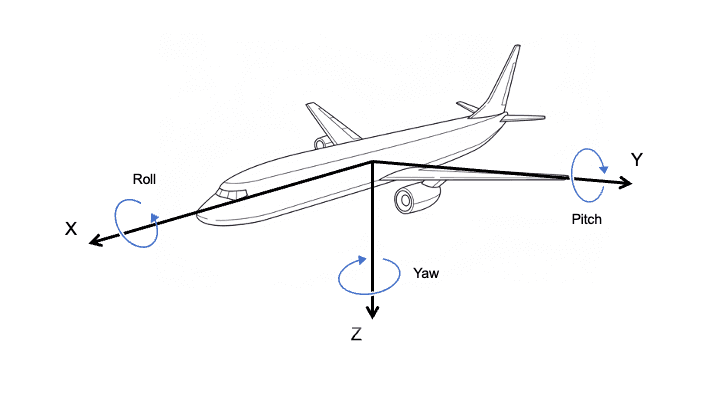
الجيروسكوبات السرعة الزاوية على طول ثلاثة محاور متعامدة (X، Y، Z)، مما يوفر بيانات أساسية لحساب التوجيه - الدوران، والميل، والانعراج. تُستخدم جيروسكوبات MEMS على نطاق واسع للتطبيقات المدمجة، بينما توفر جيروسكوبات الألياف الضوئية (FOG) وجيروسكوبات الليزر الحلقية (RLG) دقة أعلى واستقرارًا طويل الأمد للأنظمة التكتيكية والفضائية.
مقاييس التسارع
تقيس مقاييس التسارع التسارع الخطي على طول كل محور. وعند دمج هذه القيم مع مرور الوقت، ينتج عنها تغيرات في السرعة والإزاحة. وتُعد مقاييس التسارع عالية الأداء ذات عدم استقرار الانحياز المنخفض والضوضاء المنخفضة ضرورية للحفاظ على دقة تحديد الموقع بمرور الوقت.
معالج الملاحة بالقصور الذاتي
يُعدّ المعالج بمثابة النواة الحسابية لنظام الملاحة بالقصور الذاتي. فهو يدمج البيانات المُدخلة من مستشعرات الحركة، ويُطبّق خوارزميات التعويض والترشيح، ويُخرج بيانات الموقع والسرعة والاتجاه في الوقت الفعلي. كما تدعم العديد من الأنظمة دمج المستشعرات الخارجية والتشخيص في الوقت الفعلي ضمن هذه الوحدة.
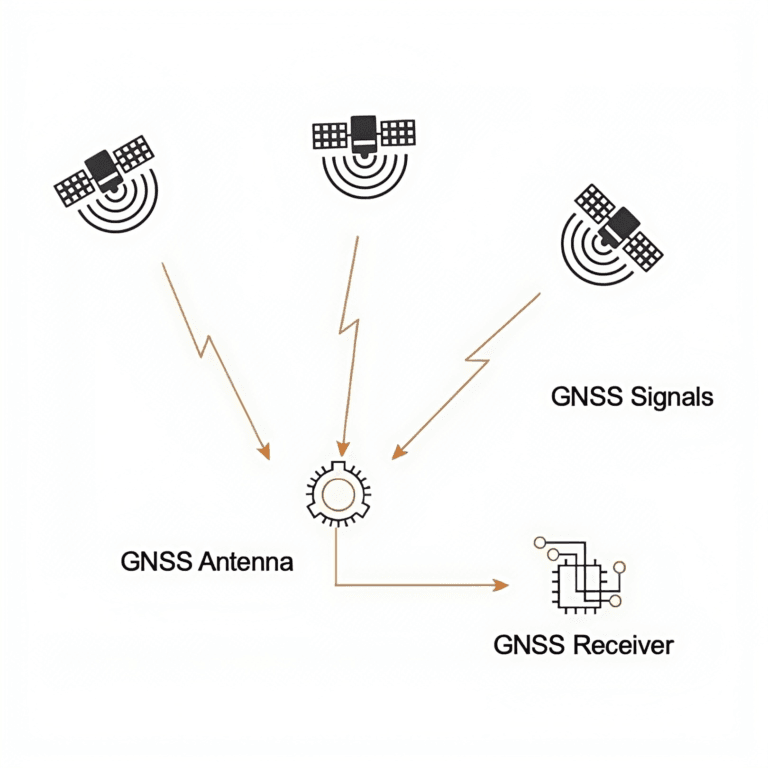
أجهزة استقبال نظام الملاحة العالمي عبر الأقمار الصناعية (GNSS)
يتزايد عدد حلول أنظمة الملاحة بالقصور الذاتي التي تدمج مستقبلات نظام الملاحة العالمي عبر الأقمار الصناعية لتحسين الدقة على المدى الطويل وتحديد المواقع العالمي. ومن خلال الجمع بين القياسات بالقصور الذاتي وبيانات الأقمار الصناعية - عادةً عبر ترشيح كالمان الموسع - تعمل هذه الأنظمة الهجينة على تصحيح الانحراف بشكل فعال وتوفير أداء ملاحة قوي عبر المنصات ذاتية التشغيل وأنظمة الفضاء الجوي والتطبيقات الجيوديسية.
أجهزة قياس المغناطيسية
تساعد أجهزة قياس المغناطيسية في تحديد الاتجاه عن طريق قياس المجال المغناطيسي للأرض. ورغم أنها أقل دقة من الحلول الجيروسكوبية، إلا أنها توفر مرجعًا مطلقًا مفيدًا، خاصة في التطبيقات ذات الحركة المنخفضة أو التطبيقات الداخلية.
مقياس الارتفاع البارومتري
توفر هذه المستشعرات تقديرًا للارتفاع بناءً على الضغط الجوي. وهي شائعة الاستخدام في الطائرات بدون طيار والطائرات والأنظمة الأرضية التي تتطلب بيانات مرجعية رأسية في بيئات قد يكون فيها ارتفاع نظام الملاحة العالمي عبر الأقمار الصناعية غير موثوق به.
تشكل هذه المكونات معًا نظام ملاحة متعدد الاستخدامات قادر على توفير بيانات الحركة عالية السرعة وفي الوقت الحقيقي - سواء كان يعمل كوحدة قصور ذاتي بحتة أو كجزء من حل GNSS/INS متكامل بإحكام مصمم للبيئات المعقدة والديناميكية.
ما هي الأنواع المختلفة لأنظمة الملاحة بالقصور الذاتي: MEMS وFOG وRLG؟
يمكن تصنيف أنظمة الملاحة بالقصور الذاتي نوع تقنية الجيروسكوب المستخدمة فيها. ويحدد اختيار التقنية خصائص الأداء الرئيسية مثل استقرار الانحياز، والضوضاء، والانحراف، والتكلفة، مما يجعل اختيار النوع المناسب لتطبيقك أمرًا بالغ الأهمية.
1. أنظمة MEMS (الأنظمة الكهروميكانيكية الدقيقة)
يُصنع نظام الملاحة بالقصور الذاتي MEMS باستخدام جيروسكوبات ومقاييس تسارع ميكانيكية دقيقة مصنوعة من السيليكون. وبفضل التطورات في تصنيع أشباه الموصلات، تُستخدم هذه الأنظمة الآن على نطاق واسع في المنصات المدمجة حيث تُشكل عوامل الحجم والوزن والطاقة والتكلفة قيودًا رئيسية.



2. نظام الملاحة بالقصور الذاتي FOG INS (نظام الملاحة بالقصور الذاتي القائم على الجيروسكوب الليفي البصري)
يعتمد نظام الملاحة بالقصور الذاتي الضبابي (FOG INS) على تأثير ساغناك، باستخدام ألياف بصرية ملفوفة لقياس الدوران. يوفر هذا النظام استقرارًا أعلى بكثير، وانحرافًا أقل، وخطية أفضل لمعامل المقياس مقارنةً بأنظمة MEMS، مما يجعله مثاليًا للملاحة التكتيكية.


3. نظام الملاحة بالقصور الذاتي القائم على الجيروسكوب الليزري الحلقي (RLG INS)
يستخدم نظام الملاحة بالقصور الذاتي RLG تقنية التداخل الليزري في تجويف مغلق الحلقة للكشف عن السرعة الزاوية بدقة فائقة. يوفر هذا التصميم دقة عالية المستوى، ويُستخدم عادةً في الأنظمة التي يكون فيها الأداء المطلق للقصور الذاتي بالغ الأهمية.
| نوع INS | المزايا | القيود | حالات الاستخدام النموذجية |
|---|---|---|---|
| MEMS INS |
|
| الطائرات بدون طيار، والروبوتات، والأنظمة القابلة للارتداء، والذخائر المتسكعة |
| ضباب |
|
| منصات الفضاء الجوي، ومركبات الدفاع، والأنظمة البحرية |
| RLG INS |
|
| الصواريخ الباليستية، والمركبات الفضائية، والطائرات المتطورة |
كيف يعمل نظام التأمين على الحياة؟
عند إعداد نظام الملاحة بالقصور الذاتي، أبدأ دائمًا بتحديد موقعه وسرعته واتجاهه الابتدائي. ومن ثم، يعتمد النظام كليًا على قياسات القصور الذاتي لتقدير كل حالة حركة لاحقة في الوقت الفعلي.
1. قياس التسارع
يستخدم النظام مقاييس تسارع ثلاثية المحاور لقياس التسارع الخطي في ثلاثة اتجاهات. تُكامل هذه القيم بمرور الوقت لحساب السرعة، ثم تُكامل مرة أخرى لحساب التغيرات في الموضع.
2. قياس معدل الدوران الزاوي
تقيس الجيروسكوبات السرعة الزاوية على طول المحاور X و Y و Z. وتُستخدم هذه القراءات لتحديث اتجاه النظام من خلال التكامل الرباعي أو تكامل زاوية أويلر.
3. مبدأ التقدير الملاحي
يعمل نظام الملاحة بالقصور الذاتي (INS) من خلال التقدير الملاحي، أي أنه يُقدّر الحالة الحالية بناءً على الحالة السابقة وبيانات المستشعرات. وهذا يُتيح له الملاحة دون الحاجة إلى مراجع خارجية مثل نظام تحديد المواقع العالمي (GNSS).
4. تراكم الأخطاء والانحراف
لأنه يدمج بيانات المستشعر المشوشة، فإن الانحيازات والأخطاء الصغيرة (مثل عدم استقرار الانحياز، خطأ عامل المقياس) تتراكم بمرور الوقت، مما يؤدي إلى انحراف في كل من الموضع والاتجاه.
5. دمج البيانات الحسية والمدخلات المساعدة
لتقليل الانحراف، غالباً ما يتم دمج نظام الملاحة بالقصور الذاتي مع أجهزة استشعار خارجية مثل نظام تحديد المواقع العالمي عبر الأقمار الصناعية (GNSS)، ومسجلات سرعة دوبلر (DVL)، ومقاييس الضغط الجوي، أو مقاييس المغناطيسية. تعمل هذه المصادر المساعدة على تصحيح الأخطاء المتراكمة وتحسين دقة التشغيل.
تتيح هذه البنية لنظام الملاحة بالقصور الذاتي تقديم الملاحة في الوقت الفعلي وبشكل مستقل في البيئات التي تكون فيها الإشارات الخارجية محدودة أو معطلة أو غير متاحة تمامًا - كما هو الحال أثناء الديناميكيات العالية أو التداخل الكهرومغناطيسي.
ما هي مقاييس الأداء التي تحدد جودة نظام المعلومات الجغرافية؟
عند اختيار نظام الملاحة بالقصور الذاتي، يُعد فهم معايير أدائه الأساسية أمرًا بالغ الأهمية لضمان تلبيته لمتطلبات المهمة. وتُعتبر المقاييس التالية من أهم هذه المعايير:
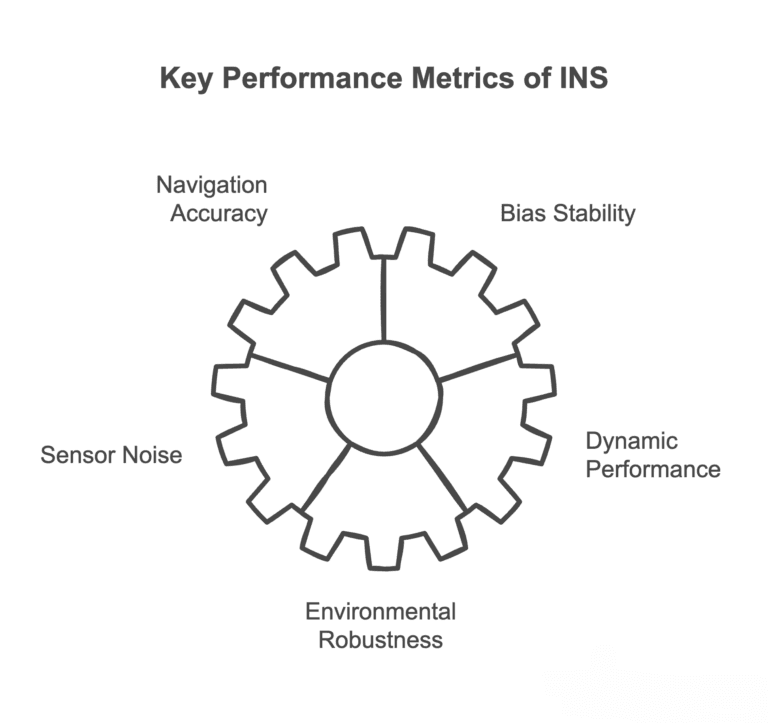
1. دقة الملاحة
تشمل دقة نظام الملاحة بالقصور الذاتي أخطاء الموقع والسرعة والاتجاه التي تتراكم بمرور الوقت. وتُعدّ الدقة العالية ضرورية للعمليات في البيئات التي لا تتوفر فيها إشارات نظام الملاحة العالمي عبر الأقمار الصناعية. فعلى سبيل المثال، يوفر جهاز Guidenav GFS120A دقة في تحديد الاتجاه تبلغ 0.01 درجة (1σ) ، ودقة في تحديد الميل/الانحراف تبلغ 0.005 درجة (1σ) ، وتحديد موقع بمستوى RTK أقل من 2 سم + 1 جزء في المليون ، مع خطأ في السرعة يصل إلى 0.02 متر/ثانية .
2. استقرار الانحياز
يعكس استقرار الانحياز الانحراف طويل الأمد للجيروسكوبات ومقاييس التسارع، مما يؤثر بشكل مباشر على قدرة الملاحة على التحمل. يتميز جهاز Guidenav GFS120A باستقرار انحياز الجيروسكوب بمقدار 0.003 درجة/ساعة واستقرار انحياز مقياس التسارع بأقل من 20 ميكروغرام ، مما يجعله مناسبًا للتطبيقات المستقلة عالية الدقة وطويلة الأمد.
3. ضوضاء المستشعر (المشي العشوائي)
يقيس المشي العشوائي ضوضاء المستشعر على المدى القصير. تشير قيم ARW وVRW المنخفضة إلى بيانات أنظف وأكثر استقرارًا أثناء الحركة.
4. الأداء الديناميكي
يُحدد معدل التحديث وزمن الاستجابة وعرض النطاق الترددي مدى سرعة استجابة نظام الملاحة بالقصور الذاتي للحركة. ويُعد الأداء الديناميكي العالي أمراً بالغ الأهمية للطائرات بدون طيار والروبوتات والصواريخ.
5. المتانة البيئية
يجب أن تتحمل أنظمة الملاحة بالقصور الذاتي الاهتزازات والصدمات ودرجات الحرارة القصوى. ويضمن الامتثال لمعايير MIL-STD أو DO-160 الموثوقية في الظروف القاسية.
إن فهم هذه المقاييس ومقارنتها يسمح للمكاملين باختيار نظام الملاحة بالقصور الذاتي المناسب لمنصتهم، مع تحقيق التوازن بين التكلفة والدقة والمتطلبات البيئية.
ما هي التطبيقات النموذجية لأنظمة الملاحة بالقصور الذاتي في مختلف الصناعات؟
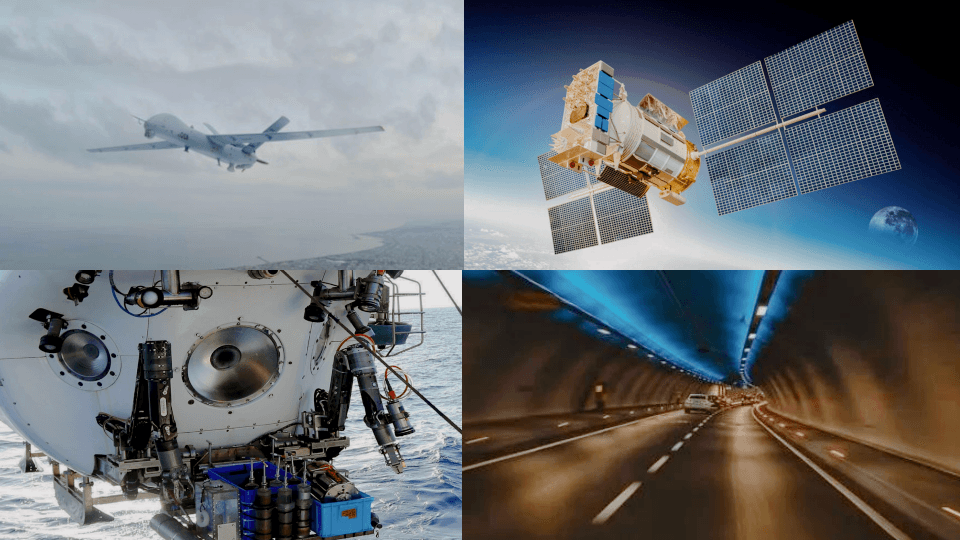
تُستخدم أنظمة الملاحة بالقصور الذاتي (INS) على نطاق واسع في مجالات الطيران والفضاء، والبحرية، والدفاع، والأنظمة غير المأهولة، والأتمتة الصناعية، والصناعات تحت الأرض، حيث تُعدّ الملاحة المستمرة والمستقلة عن الإشارات أمرًا بالغ الأهمية. في مجال الطيران والفضاء، تُمكّن هذه الأنظمة من توجيه الطائرات والصواريخ بدقة عالية؛ وفي التطبيقات البحرية، تدعم الغواصات والمركبات الآلية تحت الماء (AUVs) في المناطق التي لا يتوفر فيها نظام الملاحة العالمي عبر الأقمار الصناعية (GNSS). وتعتمد أنظمة الدفاع على أنظمة الملاحة بالقصور الذاتي في تحديد الأهداف، والتحكم في النيران، والملاحة في البيئات التي لا يتوفر فيها نظام تحديد المواقع العالمي (GPS). وتستخدم المنصات غير المأهولة، مثل الطائرات بدون طيار (UAVs) والمركبات الأرضية غير المأهولة (UGVs) والمركبات تحت الماء غير المأهولة (UUVs)، أنظمة الملاحة بالقصور الذاتي لتحديد المواقع في الوقت الفعلي ودمج البيانات الحسية. وفي مجال الروبوتات الصناعية، تضمن أنظمة الملاحة بالقصور الذاتي التحكم الدقيق في حركة المركبات الموجهة آليًا (AGVs) والرافعات. وفي مجال التعدين وحفر الأنفاق، تُمكّن أنظمة الملاحة بالقصور الذاتي من تحديد المواقع تحت الأرض بشكل موثوق للآلات الثقيلة وأنظمة الحفر.
كيف تتصدر شركة GuideNav صناعة الملاحة بالقصور الذاتي؟
بفضل خبرتها التي تزيد عن 15 عامًا، GuideNav حلول الملاحة بالقصور الذاتي عالية الأداء التي تحظى بثقة شركات تكامل الأنظمة الدفاعية والفضائية والمستقلة في جميع أنحاء العالم.
خطوط إنتاج متنوعة
من أنظمة الملاحة بالقصور الذاتي MEMS المدمجة للطائرات بدون طيار إلى أنظمة الملاحة بالقصور الذاتي FOG عالية الدقة للمجالات البحرية والفضائية، تغطي GuideNav مجموعة كاملة من ملفات تعريف المهام.
مُحسَّن لـ SWaP-C
تم تصميم جميع الأنظمة من حيث الحجم والوزن والطاقة وكفاءة التكلفة - وهي مثالية للمنصات المتنقلة والمدمجة والتكتيكية.
جاهز للتكامل الهجين
تدعم منصات INS الخاصة بنا الدمج السلس مع GNSS وDVL وأجهزة الاستشعار المساعدة الأخرى عبر واجهات قياسية (UART وCAN وEthernet).
متين ومجرب ميدانيًا
صُممت وحدات GuideNav لتلبية معيار MIL-STD-810H، وهي مقاومة للصدمات والاهتزازات، وتعمل بشكل موثوق في البيئات القاسية.
تُعد GuideNav الشريك المفضل للمكاملين الذين يسعون للحصول على أنظمة الملاحة بالقصور الذاتي المتقدمة (INS) التي تجمع بين الدقة العالية والمتانة التشغيلية والامتثال الكامل للتصدير لتطبيقات الدفاع والفضاء والطيران والتطبيقات المستقلة الصعبة.