في تجربتي في تصميم أنظمة القصور الذاتي للعمليات الميدانية، غالبًا ما يتجاهل المهندسون رقمًا بسيطًا ظاهريًا: الانحراف العشوائي للزاوية. قد لا يكون هذا الرقم جذابًا كاستقرار الانحياز أو عرض النطاق الترددي، ولكنه يحدد الحد الأقصى الفعلي لمدى موثوقية النظام، خاصةً عند انقطاع إشارة نظام تحديد المواقع العالمي (GNSS). الانحراف العشوائي للزاوية ليس خطأً يُمكن التخلص منه بالمعايرة، بل هو ضوضاء تتزايد باستمرار. بمجرد فهم كيفية عمله، سيتغير أسلوب تقييمك لكل وحدة قياس بالقصور الذاتي (IMU) في مختبرك.
ARW ليس مجرد مواصفة، بل هو بمثابة ساعة. فمنذ لحظة بدء تشغيل وحدة القياس بالقصور الذاتي (IMU)، يُخبرك هذا المؤشر بمدى سرعة تدهور دقة التوجيه. وكلما انخفضت قيمته، زادت مدة بقاء النظام في الوضع الصحيح.
على مر السنين، رأيت فرقًا تختار وحدات قياس القصور الذاتي (IMUs) بناءً على مواصفات الانحياز ومخططات عرض النطاق الترددي، لتصطدم بانحراف يتحدى المحاكاة. غالبًا لا يكون هذا الانحراف ناتجًا عما أغفلوه، بل عما لم يولوه الاهتمام الكافي: ضوضاء الانحراف النسبي (ARW). بمجرد إدراكك أن ضوضاء الانحراف النسبي تحدد أفق الضوضاء، تبدأ بقراءة جداول البيانات بشكل مختلف. تتوقف عن السؤال "ما هي الدقة؟" وتبدأ بالسؤال "إلى متى يمكنني الاعتماد على هذا الجهاز قبل أن يتسلل الشك؟"
جدول المحتويات
ما هو بالضبط المشي العشوائي الزاوي (ARW)؟
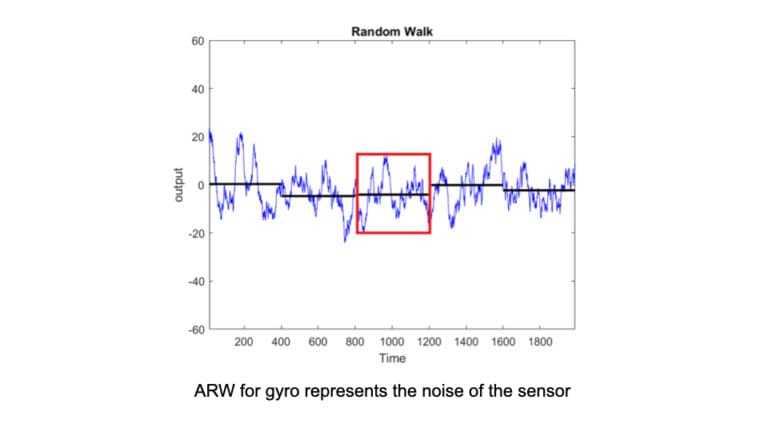
ببساطة، الانحراف الزاوي العشوائي (ARW) بأنه التشويش الذي يتراكم في الجيروسكوب لحظة بدء حساب معدل الدوران الزاوي. لكن دعونا نوضح الأمر، فهذا ليس خطأ في القياس أو انحرافًا في الانحياز. الانحراف الزاوي العشوائي هو نمو عدم اليقين الذي يتناسب مع الجذر التربيعي للزمن، وينشأ من التشويش الأبيض في مسار إشارة الجيروسكوب. لا يمكن معايرته، ولا يمكن انتظار استقراره، فهو موجود دائمًا، يعمل في الخلفية.
أصف غالبًا تقنية ARW للمهندسين المبتدئين بأنها "ضبابية خط الأساس" لتقدير اتجاهك . فهي لا تتأثر بحركة المنصة أو ثباتها. حتى في المختبر ، مع وجود مستشعر ثابت تمامًا مثبت على الطاولة، تتراكم قيم ARW. هذا ما يجعلها أساسية للغاية. إنها ليست عيبًا في الأداء، بل هي قوانين الفيزياء.
كيف يتم قياس ARW عملياً؟
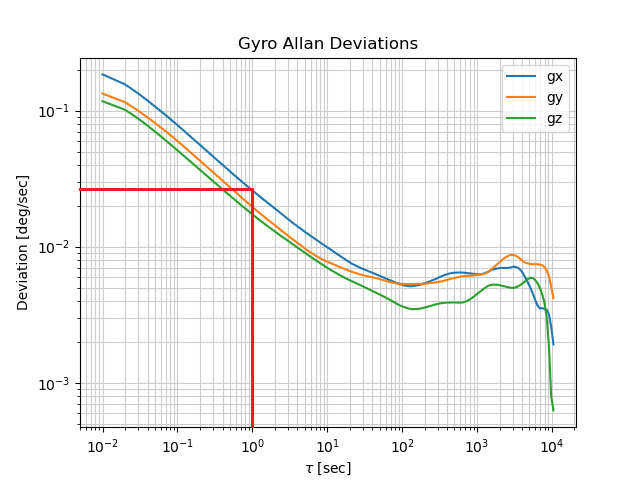
يُعد تحليل تباين ألان المعيار الذهبي لقياس ARW.
تُحلل هذه التقنية أنواعًا مختلفة من الضوضاء على فترات زمنية متفاوتة. عند فترات حساب المتوسط القصيرة، يظهر انحراف آلان (ARW) على شكل ميل مميز قدره -½ على مخطط الانحراف اللوغاريتمي المزدوج. إنه مؤشر على وجود ضوضاء بيضاء في مخرجات الجيروسكوب، ويحدد الحد الأدنى لدقة تحديد الاتجاه.
لكن لا يمكنك الاعتماد فقط على ورقة البيانات.
في سير عملي، أقوم دائمًا بإجراء اختبارات ثابتة مضبوطة على منصة معزولة ميكانيكيًا، وأسجل بيانات الجيروسكوب الخام، وأنشئ مخططات ألان الخاصة بي. يشير الميل الواضح قصير المدى إلى استقرار الجيروسكوب. أما إذا كان الميل متذبذبًا أو غير منتظم، فأعلم أن ما يُعلن عنه بـ "0.05 درجة/√ساعة" قد لا يكون دقيقًا في التطبيق العملي.
إن ARW ليس مجرد رقم، بل هو نمط يجب أن تراه في البيانات الحقيقية.
لهذا السبب أتعامل مع ARW كأداة للتحقق، وليس مجرد اقتباس. إذا لم يتوافق تباين آلان الخاص بك مع المواصفات، فقد تتأثر منظومة الاندماج بأكملها لاحقًا.
لماذا يُعدّ ARW أمراً بالغ الأهمية لدقة وحدة القياس بالقصور الذاتي (IMU)؟
ضجيج لا ينام
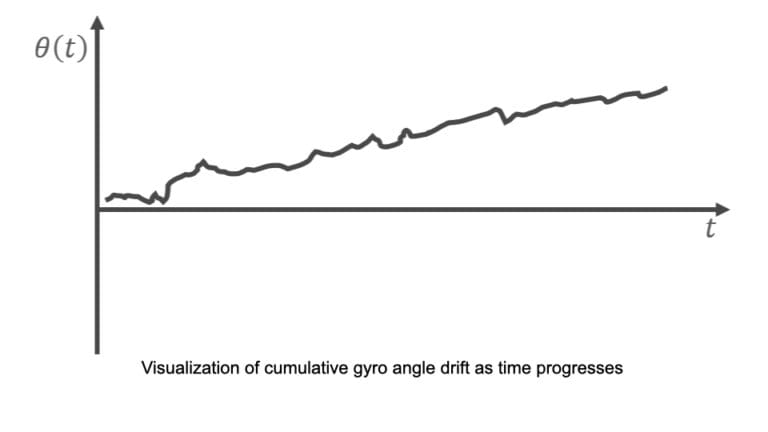
على عكس الأخطاء الحتمية كالانحياز أو عامل المقياس، يُدخل نظام ARW باستمرار عنصر عدم اليقين في تقدير الاتجاه. ولأن الجيروسكوبات تقيس معدل الدوران الزاوي ، وتتكامل هذه المعدلات مع مرور الوقت ، فإن حتى التقلبات العشوائية الصغيرة تتراكم لتُحدث انحرافًا كبيرًا في الزاوية. لا تحتاج إلى دقائق أو ساعات لتشعر بتأثيره، ففي المنصات عالية الحساسية، يبدأ نظام ARW في تقليل الدقة في غضون ثوانٍ .
السقف غير المرئي للملاحة
يُحدد الانحراف المعياري للزاوية (ARW) حدًا أقصى لمدة قدرة وحدة القياس بالقصور الذاتي (IMU) على توفير توجيه موثوق به عند عدم توفر تصحيحات خارجية (مثل نظام الملاحة العالمي عبر الأقمار الصناعية GNSS أو مقاييس المغناطيسية). لقد رأيت مرشحات كالمان مضبوطة بدقة تفقد تدريجيًا دقة التوجيه لمجرد أن قيمة الانحراف المعياري للزاوية (ARW) للجيروسكوب الأساسي كانت أعلى من اللازم بالنسبة لمدة المهمة . هذه ليست مشكلة برمجية، بل هي قيد فيزيائي. في كل نظام قصور ذاتي صممته، بمجرد معرفة قيمة الانحراف المعياري للزاوية (ARW)، يمكنني التنبؤ بموعد فشل الملاحة. وهذا أمر بالغ الأهمية.
كيف يختلف ARW عن عدم استقرار الانحياز؟
| المشي العشوائي الزاوي (ARW) | عدم استقرار الانحياز |
|---|---|
| ضوضاء قصيرة المدى. تظهر على الفور في مخرجات الجيروسكوب على شكل تقلبات عشوائية صغيرة. | انحراف متوسط إلى طويل الأجل. تذبذب بطيء لمستوى سعر الصفر بمرور الوقت. |
| يزداد مع جذر الزمن. يتسبب في تراكم خطأ التوجيه باستمرار. | يحتوي على هضبة مسطحة في مخططات تباين ألان - إنه "الحدبة" التي يبحث عنها المهندسون. |
| غير قابل للتنبؤ ولكنه محدود. يمكن نمذجته إحصائياً، ولكن لا يمكن إزالته. | متغيرة ببطء. غالباً ما يتم نمذجتها وتعويضها جزئياً باستخدام المرشحات. |
| يهيمن على دقة المدة القصيرة. وهو أمر بالغ الأهمية بشكل خاص في الأنظمة سريعة الحركة وعالية الديناميكية. | يهيمن على الدقة على المدى الطويل. وهو أمر مهم في تطبيقات مثل أنظمة الملاحة بالقصور الذاتي ذات الدقة العالية أو الملاحة طويلة المدى. |
لماذا هذا الالتباس؟
لأن كلاً من انحراف المحور التلقائي (ARW) وعدم استقرار الانحياز يُسببان الانحراف، ولكن بطرق مختلفة وعلى نطاقات زمنية متباينة. غالبًا ما يخلط المهندسون الجدد في مجال الأنظمة بالقصور الذاتي بينهما ، معتقدين أن انحراف الانحياز هو المصدر الوحيد لخطأ الملاحة. في تجربتي، غالبًا ما يكون انحراف المحور التلقائي هو ما يُحد من الأداء في المهام التكتيكية ، خاصةً عندما يُقاس وقت التشغيل بدون نظام الملاحة العالمي عبر الأقمار الصناعية (GNSS) بالدقائق، وليس بالساعات.
ما هي قيم ARW النموذجية لوحدات IMU المختلفة؟
في المشاريع الحقيقية، نادراً ما أسأل "ما هو أفضل جهاز IMU ؟" - بل أسأل "ما هو أقل وزن إجمالي يمكنني الحصول عليه ضمن هذا الحجم والوزن والميزانية؟" غالبًا ما يكون الوزن الإجمالي هو المواصفة التي تخبرك بهدوء ما إذا كان المستشعر من الدرجة الاستهلاكية أو من الدرجة التكتيكية أو الاستراتيجية.
إليكم كيف رأيت توزيع بيانات ARW عبر فئات المستشعرات:
| فئة IMU | معدل عرض النطاق الترددي النموذجي (°/√س) | مكانه الصحيح |
|---|---|---|
| أنظمة MEMS الاستهلاكية | 1 – 10 | الهواتف، والأجهزة القابلة للارتداء، والروبوتات للمبتدئين |
| أنظمة MEMS الصناعية | 0.1 – 1 | طائرات بدون طيار مزودة بنظام تحديد المواقع العالمي (GNSS)، ومنصات خفيفة ذاتية التشغيل |
| أنظمة MEMS التكتيكية | 0.05 – 0.1 | طائرات بدون طيار للدفاع، تثبيت الأسلحة، المركبات |
| ضباب من الدرجة الملاحية | 0.001 – 0.01 | الطائرات بدون طيار البحرية، والفضاء، والسكك الحديدية، والطائرات بدون طيار طويلة المدى |
| استراتيجية RLG | < 0.001 | الغواصات، والصواريخ الباليستية العابرة للقارات، والأنظمة العسكرية عالية الحماية |
أتعامل مع تقنية ARW كمرشح قطع في قرارات التصميم.
إذا كان نظامي يحتاج إلى العمل لمدة 30 دقيقة بدون نظام تحديد المواقع العالمي (GNSS) مع الحفاظ على دقة اتجاه تبلغ درجة واحدة، فإن وحدات MEMS بدقة 0.2 درجة/جذر ساعة لن تفي بالغرض. قد تتمكن وحدات MEMS التكتيكية من تحقيق ذلك بصعوبة. إذا كنت بحاجة إلى أداء يتجاوز ذلك، فلا بديل عن تقنية FOG.
ماذا سيحدث بعد ذلك؟
يفترض أنك الآن قد فهمت بوضوح ماهية الانحراف التلقائي للطائرات بدون طيار، وكيفية قياسه، وأهميته. لكن النظرية ليست سوى نصف المعادلة. في الجزء الثاني من هذه السلسلة، سأشرح بالتفصيل كيف يتجلى الانحراف التلقائي للطائرات بدون طيار في الأنظمة الحقيقية - بدءًا من انحراف الطائرات بدون طيار وصولًا إلى المهام التي تعتمد على القياس بالقصور الذاتي فقط - وكيف يصمم المهندسون، مثلنا، حلولًا للتعامل معه. سنتناول الجوانب العملية: قيود البرمجيات، والعزل الميكانيكي، واستراتيجيات دمج البيانات، وعتبات الانحراف التلقائي للطائرات بدون طيار الصارمة للتطبيقات الحيوية.
→ تابع إلى الجزء الثاني: التصميم مع مراعاة الواقع المعزز
