في الجزء الأول ، شرحنا ماهية نظام ARW ولماذا يُؤثر بشكلٍ غير مباشر على موثوقية أي نظام قائم على وحدة قياس القصور الذاتي (IMU). لكن معرفة كيفية عمل نظام ARW لا تُفيد إلا إذا أمكن تصميم النظام بما يتناسب معه. يُركز هذا الجزء الثاني على الجانب العملي: كيف يُؤثر نظام ARW على الملاحة الفعلية للطائرات بدون طيار، وما يُمكن للبرمجيات فعله وما لا يُمكنها فعله، وكيف أُقيّم أجهزة الاستشعار عندما يكون الفشل غير مقبول.
تحدد ظاهرة المشي العشوائي الزاوي (ARW) الحد الأقصى لدقة وحدة القياس بالقصور الذاتي (IMU) . ولا يمكن إزالتها بواسطة البرمجيات، بل يمكن تقليلها فقط من خلال اختيار مستشعر منخفض الضوضاء، وتصميم حراري مستقر، وعزل الاهتزازات، واستراتيجيات فعالة لدمج بيانات المستشعرات المتعددة.
لهذا السبب، سأشرح لكم في هذا الجزء كيف يظهر نظام ARW في عمليات الطائرات بدون طيار في العالم الحقيقي، ولماذا لا يمكن للبرمجيات وحدها إلغاؤه، وما هي خيارات التصميم العملية التي يمكن أن تحدث الفرق بين نجاح المهمة وفشلها، مثل اختيار المستشعرات، والإدارة الحرارية، والعزل الميكانيكي، والدمج.
جدول المحتويات
كيف يؤثر نظام ARW على ملاحة الطائرات بدون طيار؟
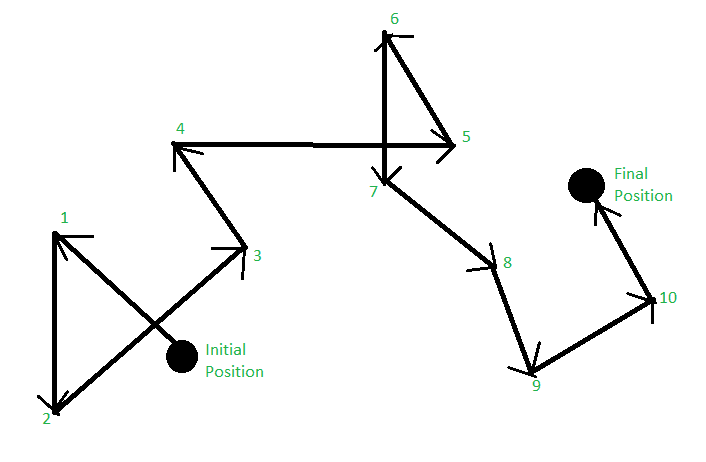
تخيل هذا: أنت تقود طائرة بدون طيار ثابتة الجناحين عبر وادٍ لا توجد فيه إشارة نظام تحديد المواقع العالمي (GNSS). يعتمد الطيار الآلي كليًا على وحدة القياس بالقصور الذاتي (IMU) للحفاظ على وضعية الطائرة واستقرار مسارها. في الدقائق الأولى، يبدو كل شيء على ما يرام. ولكن بعد ذلك، يبدأ اتجاه الطائرة بالانحراف - ببطء في البداية، ثم بسرعة أكبر. تبدأ الطائرة بالانحراف، ويبدأ نظام تثبيت الارتفاع بالتراجع، وتفقد مرجعك. ما الذي حدث؟
هذا هو نظام ARW قيد التشغيل. حتى في غياب الحركة، والتدرجات الحرارية، والاهتزازات، فإن الضوضاء الزاوية المدمجة تُضعف ثقتك تدريجيًا في التحكم في الميل والدوران والاتجاه . بمجرد أن يتجاوز الانحراف الناتج عن نظام ARW عتبات التحكم في الطيران، لن يُجدي أي قدر من ضبط PID أو التنعيم نفعًا في إنقاذ الطائرة.
في تصميماتي الخاصة للطائرات بدون طيار، أعتبر سرعة الاستجابة الجوية (ARW) بمثابة ميزانية وقت الملاحة . قد يمنحك جيروسكوب MEMS بدقة 0.2 درجة/√ساعة من 10 إلى 15 دقيقة من الاستقرار الفعال في منطقة محرومة من نظام الملاحة العالمي عبر الأقمار الصناعية (GNSS). أما جيروسكوب MEMS تكتيكي بدقة 0.05 درجة/√ساعة فيمدد هذه الفترة. يوفر لك نظام FOG ساعات إضافية. الفرق لا يقتصر على الأداء فحسب، بل يتعلق بإمكانية تنفيذ المهمة من الأساس .
هل يمكن تعويض ARW في البرمجيات؟
هذا هو الفخ الذي أراه كثيراً: يواجه فريق مشكلة انحراف التوجيه ويفترض أنه يمكن إصلاحها في البرامج الثابتة. فيضيفون المزيد من التصفية، أو يزيدون من ضبط كسب كالمان، أو يزيدون طبقات دمج المستشعرات، لكن الانحراف لا يختفي . لأن ما يواجهونه ليس خطأً برمجياً أو خللاً في تكوين الدمج، بل هو قوانين الفيزياء.
إنّ ARW ليس انحيازًا، وليس تعويضًا، بل هو ضوضاء لا يمكن التخلص منها. لا يستقر مع مرور الوقت، ولا يتلاشى كمعدل الانحراف الحراري البطيء. إنه موجود في أسفل كل مخرج جيروسكوب، مما يُدخل عدم اليقين في عملية التكامل من الثانية الأولى.
نعم، يساعد دمج البيانات. يمكن لتحديثات نظام الملاحة العالمي عبر الأقمار الصناعية (GNSS) إعادة ضبط انحراف الاتجاه. ويمكن لأنظمة الرؤية أو تقنية الليدار تثبيت الوضع. ولكن عندما تتعطل هذه الأنظمة - مثلاً في نفق أو تحت التشويش - يعود نظامك إلى بيانات وحدة القياس بالقصور الذاتي (IMU) الخام ، وفي تلك اللحظة، يصبح مؤشر ARW بمثابة عداد تنازلي. إذا كان التشويش الداخلي للمستشعر مرتفعًا جدًا، فلن تُجدي أي حيلة برمجية نفعًا.
أقول للفرق: يمكنكم تصفية تأثيرات ARW، لكن لا يمكنكم محوها. إذا كانت منصتكم بحاجة إلى الطيران أو التصويب أو الاستقرار دون تصحيح خارجي لأكثر من بضع دقائق، فاختاروا الجيروسكوب مع مراعاة ذلك، أو صمموه بحيث يكون قابلاً للفشل.
كيف يقلل المهندسون من مخاطر إعادة التدوير في تصميم الأنظمة؟
لا يمكنك التخلص من تأثير ARW، ولكن يمكنك تصميم نظام ذكي للتعامل معه . كل نظام قدمته بأداء قصور ذاتي موثوق بدأ بهذا السؤال: "ما هو الحد الأدنى المطلوب لتأثير ARW، وما هي أذكى طريقة لتحقيق ذلك؟" إليك كيف أتعامل مع الأمر:
- يأتي اختيار المستشعر في المقام الأول. إذا كانت ميزانيتك المخصصة لتقنية ARW محدودة، فلن تُجدي أي خوارزمية نفعًا مع جيروسكوب MEMS رخيص الثمن. ابدأ بأقل جهاز ARW يناسب حجم الإنتاج، واستهلاك الطاقة، والميزانية المتاحة. من واقع خبرتي، يُحدد هذا القرار وحده 80% من جودة النظام اللاحق.
- يُعدّ الاستقرار الحراري أكثر أهمية مما يعتقد الناس. حتى الجيروسكوب ذو المواصفات الجيدة قد يعاني من ارتفاع مستوى الضوضاء مع ارتفاع درجة الحرارة. لقد رأيت قيم ARW تتضاعف في ظل عزل حراري ضعيف. الكتلة الحرارية المستقرة أو التحكم النشط المعتدل يُحدثان فرقًا كبيرًا.
- يقلل العزل الميكانيكي من الضوضاء الفعالة. تُدخل الاهتزازات طاقة واسعة النطاق إلى مسار إشارة المستشعر، ويُفسر جزء منها على أنه حركة زاوية. لا تُقلل الحوامل المرنة أو العوازل المُضبوطة من الضوضاء الفعالة نفسها، ولكنها تُقلل ما يعتبره ضوضاء فعالة.
- يُوسّع دمج البيانات الحسية نطاقك الزمني. فأنظمة الملاحة عبر الأقمار الصناعية، ومقاييس المغناطيسية، ومقاييس الضغط الجوي، وقياس المسافة البصرية، كلها تُساعد، ولكن بشرط إدارة عدم اليقين الخاص بها بكفاءة. لا أعتبر دمج البيانات الحسية حلاً مؤقتاً لوحدات القياس بالقصور الذاتي المعيبة، بل عاملاً مُضاعفاً لكفاءة الوحدات الجيدة.
ما هي الفكرة الأساسية؟ تُحدد ARW الحد الأدنى. كل شيء آخر يبني عليه. إذا كان المستشعر الخاص بك مشوشًا في جوهره، فإن كل طبقة فوقه - المرشحات، والمُقدِّرات، والدمج - سترث هذا الغموض.
ما الذي يجب أن تبحث عنه في تطبيق حساس لملفات ARW؟
عند اختيار وحدة قياس القصور الذاتي (IMU) لمنصة بالغة الأهمية، فإنك لا تختار مجرد مواصفات، بل تختار أيضًا مدة تعطلها. يحدد لك معدل تعطل النظام (ARW) المدة التي يمكن لنظامك خلالها الطيران أو التوجيه أو التصويب أو الاستقرار دون تصحيح خارجي قبل أن يبدأ عدم اليقين بالظهور. لهذا السبب، أعتبر معدل تعطل النظام (ARW) المتغير الحاسم في اختيار وحدة قياس القصور الذاتي (IMU).
هكذا أطرح الأمر:
- إذا كانت فترة انقطاع إشارة نظام تحديد المواقع العالمي (GNSS) لديك أقل من 5 دقائق ، وكنت تحتاج فقط إلى توجيه تقريبي، فقد تفي أنظمة MEMS الصناعية (0.1-0.5 درجة/√ساعة) بالغرض. لكن توقع أن يقاوم المرشح الانحراف طوال الوقت.
- إذا كان من الضروري أن تبقى منصتك مستقرة لمدة تتراوح بين 10 و20 دقيقة ، كما هو الحال في طائرات الاستطلاع والمراقبة بدون طيار أو البصريات المثبتة على المركبات، فإن أجهزة الاستشعار التكتيكية بتقنية MEMS ذات دقة ARW في نطاق 0.05 درجة/√ساعة هي الحد الأدنى المطلوب. لا أستخدم أبدًا أجهزة استشعار من الفئة الاستهلاكية هنا - بلا استثناء.
- إذا كنت بحاجة إلى موثوقية على مستوى الساعة - كما هو الحال في الملاحة البحرية، وأنظمة السكك الحديدية، والأسلحة المحمولة جواً - فإن تقنية FOG لم تعد خياراً. ستحتاج إلى دقة ARW أقل من 0.01 درجة/√ساعة، والأهم من ذلك، الاتساق والمرونة البيئية التي توفرها بنية FOG.
في كل مراجعة تصميم أجريها، أسأل: "ماذا يحدث عند انقطاع الإشارات الخارجية؟" إذا كانت الإجابة "يتدهور الأداء ببطء وبشكل متوقع"، فهذا يعني أن نظام ARW يؤدي وظيفته على أكمل وجه. أما إذا كانت الإجابة "نفقد الإشارة في أقل من 3 دقائق"، فقد اخترت وحدة قياس القصور الذاتي (IMU) الخاطئة.
ARW كمعيار لاختيار وحدة القياس بالقصور الذاتي المناسبة
لا يُعدّ الانحراف العشوائي الزاوي مجرد رقم مُضمّن في ورقة البيانات، بل هو المعيار الذي يُحدّد مدى موثوقية وحدة القياس بالقصور الذاتي (IMU) في التطبيقات بالغة الأهمية. يُدرك المهندسون في مجالات الدفاع والفضاء والطيران والملاحة البحرية أن انخفاض الانحراف العشوائي الزاوي هو الفرق بين الأنظمة التي تنحرف في غضون دقائق والأنظمة التي تظل مستقرة لساعات أو حتى أيام.
في GuideNav ، نركز على هذا المعيار تحديدًا. صُممت أنظمة الملاحة القائمة على وحدات القياس بالقصور الذاتي (IMUs) وتقنية FOG لدينا بأداءٍ رائد في مجال أنظمة الملاحة الجوية، مما يضمن دقةً عالية في البيئات التي تفتقر إلى إشارات GNSS، والطائرات بدون طيار طويلة المدى، ومنصات التثبيت الدقيقة. سواءً كنت بحاجة إلى الكفاءة المدمجة لأنظمة MEMS التكتيكية أو الاستقرار الفائق لتقنية FOG المستخدمة في الملاحة، فإن GuideNav توفر حلولًا مصممة خصيصًا لتلبية متطلبات نجاح المهمة.
