
كيف تُشغّل الجيروسكوبات الكهروميكانيكية الدقيقة (MEMS) الروبوتات الحديثة: من المركبات الموجهة آلياً في المستودعات إلى الأذرع الشبيهة بالبشر
تُشكّل الجيروسكوبات الكهروميكانيكية الدقيقة (MEMS) النواة الأساسية للروبوتات المتقدمة، إذ توفر استشعارًا دقيقًا لمعدل الدوران، وتتبعًا فوريًا للاتجاه، وتغذية راجعة موثوقة للحركة، كل ذلك في حزم صغيرة الحجم وموفرة للطاقة. وهي ضرورية لتمكين الملاحة المستقرة والحركة البارعة لكل من المركبات الموجهة آليًا (AGVs) والأذرع الروبوتية الشبيهة بالبشر.

أنظمة MEMS أم ألياف بصرية موجية (FOG) لتثبيت الصواريخ بعيدة المدى في المنصات المدرعة؟ إليك ما تحتاج لمعرفته
استنادًا إلى التجارب العملية، تتفوق الجيروسكوبات الليفية البصرية (FOG) على الجيروسكوبات الكهروميكانيكية الدقيقة (MEMS) من حيث الاستقرار طويل الأمد، ومقاومة الاهتزازات، والصلابة الحرارية في تطبيقات تحديد المدى بالليزر (LRF) المثبتة على المركبات. لا تزال الجيروسكوبات الكهروميكانيكية الدقيقة (MEMS) خيارًا مناسبًا للمنصات ذات المساحة المحدودة أو الميزانية المحدودة، ولكنها تتطلب تصميمًا دقيقًا للتعويض.

دورة حياة جيروسكوب FOG: المتانة والمعايرة والصيانة
في التطبيقات العملية، يتطلب الحفاظ على دقة واستقرار الجيروسكوبات الليفية البصرية (FOG) أكثر من مجرد تصميم متطور لأجهزة الاستشعار - فهو يتطلب إطار عمل نظام معاير يشمل التعويض الحراري والعزل الميكانيكي والصيانة الواعية بدورة الحياة.
لماذا تُعدّ وحدات قياس القصور الذاتي (IMUs) المزودة بجيروسكوب الألياف الضوئية (FOG) بمثابة تغيير جذري لتطبيقات التثبيت على الكاميرا؟
لهذا السبب أعتمد على وحدات قياس القصور الذاتي (IMUs) المصنوعة من الجيروسكوب الليفي البصري - فهي توفر دقة ومرونة لا مثيل لهما، مما يحول أنظمة التثبيت المهتزة وغير الموثوقة إلى منصات ثابتة كالصخر بغض النظر عن الظروف.
كيف يمكن لحلول أنظمة الملاحة بالقصور الذاتي التغلب على تحديات الملاحة في البيئات المعقدة؟
تعمل أنظمة الملاحة بالقصور الذاتي (INS) بشكل مستقل عن الإشارات الخارجية، وذلك بقياس التسارع والسرعة الزاوية عبر مستشعرات داخلية، مما يجعلها ضرورية في البيئات التي تكون فيها إشارات نظام الملاحة العالمي عبر الأقمار الصناعية (GNSS) محجوبة أو غير موثوقة. وبفضل دمج البيانات المتطور من المستشعرات، وتعويض الأخطاء، والتصحيحات المدعومة بالذكاء الاصطناعي، توفر أنظمة الملاحة بالقصور الذاتي تحديدًا دقيقًا ومستمرًا للموقع في أصعب الظروف.
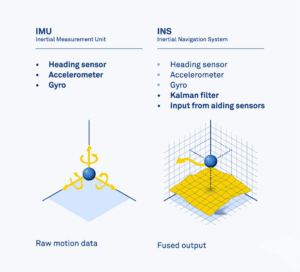
ما الفرق بين وحدة القياس بالقصور الذاتي (IMU) ونظام الملاحة بالقصور الذاتي (INS)؟
يقيس جهاز IMU الحركة، بينما يستخدم نظام الملاحة بالقصور الذاتي (INS) بيانات IMU لحساب الموقع والاتجاه بمرور الوقت - IMU هو جهاز استشعار، وINS هو نظام.