الحساسية الحرارية في الجيروسكوبات الليفية البصرية: استراتيجيات التصميم للبيئات القاسية
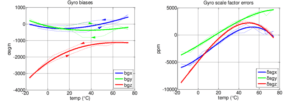
تنشأ الحساسية الحرارية في الجيروسكوبات الليفية البصرية من تمدد المادة، وتغيرات معامل الانكسار، وسلوك المصدر البصري. وتُمكّن الاستراتيجيات المتقدمة - كالتعويض الحراري، وتحسين لفّ الملفات، والمعايرة الدقيقة - الجيروسكوبات الليفية البصرية من الحفاظ على دقتها في البيئات القاسية.
التصميم مع مراعاة ARW: الهندسة العملية لاختيار وحدة القياس بالقصور الذاتي (الجزء 2)
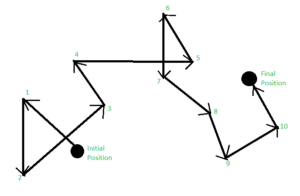
يُحدد المشي العشوائي الزاوي (ARW) الحد الأقصى لدقة وحدة القياس بالقصور الذاتي (IMU). ولا يمكن إزالته بواسطة البرمجيات، بل يمكن تقليله فقط من خلال اختيار مستشعر منخفض الضوضاء، وتصميم حراري مستقر، وعزل الاهتزازات، واستراتيجيات فعالة لدمج بيانات المستشعرات المتعددة.
فهم ARW: الحد الخفي لدقة وحدة القياس بالقصور الذاتي (الجزء 1)
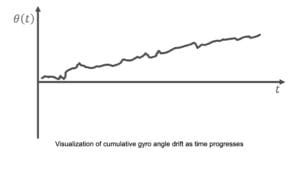
إنّ ARW ليس مجرد مواصفة، بل هو بمثابة ساعة. فمنذ لحظة بدء تشغيل وحدة القياس بالقصور الذاتي (IMU)، يُخبرك هذا المؤشر بمدى سرعة تدهور دقة التوجيه. وكلما انخفضت قيمته، زادت مدة بقاء النظام في الوضع الصحيح.
عشرة أخطاء تصميمية يرتكبها المهندسون عند دمج وحدات القياس بالقصور الذاتي (IMUs)
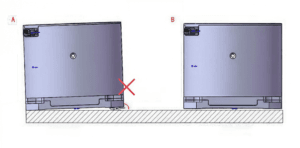
قد تؤدي أخطاء دمج وحدة القياس بالقصور الذاتي (IMU) إلى الإضرار بموثوقية الملاحة. فمن عدم المحاذاة والاهتزاز إلى ضعف المعايرة والاعتماد المفرط على دمج البيانات الحسية، غالبًا ما يكرر المهندسون نفس الأخطاء. في هذا الدليل، نستعرض أكثر عشرة أخطاء شيوعًا في دمج وحدة القياس بالقصور الذاتي، ونشرح عواقبها، ونقدم حلولًا متخصصة يمكنك تطبيقها في مشاريعك.
تقنية FOG في التحكم في وضعية المركبات الفضائية: ما وراء حدود MEMS
تتفوق الجيروسكوبات الليفية البصرية على الجيروسكوبات الكهروميكانيكية الدقيقة (MEMS) بفضل استقرارها طويل الأمد، ومقاومتها للإشعاع، ودقتها التي تظل موثوقة لسنوات. وهي ضرورية للأقمار الصناعية، والمجموعات الفضائية، ومجسات الفضاء السحيق حيث لا مجال للتنازل عن الدقة.
كيف يُعيد دمج البيانات من أجهزة استشعار متعددة تعريف أنظمة الملاحة بالقصور الذاتي
تعتمد دقة الملاحة بالقصور الذاتي في نهاية المطاف على مدى جودة نمذجة أخطاء المستشعرات وتعويضها. بدءًا من انحراف الانحياز وصولًا إلى المشي العشوائي، يتطلب التخفيف الفعال مزيجًا من تصميم الأجهزة، وإجراءات المعايرة، والتصحيح الخوارزمي في الوقت الفعلي.