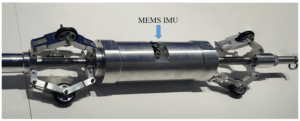
تطبيق وحدة القياس بالقصور الذاتي الكهروميكانيكية الدقيقة (MEMS IMU) في روبوتات فحص خطوط الأنابيب
توفر وحدات القياس بالقصور الذاتي بتقنية MEMS نظام ملاحة دقيقًا بالقصور الذاتي لروبوتات فحص خطوط الأنابيب العاملة في بيئات تفتقر إلى نظام الملاحة العالمي عبر الأقمار الصناعية (GNSS). ومن خلال توفير بيانات مستقرة عن الوضع والسرعة والموقع، تضمن هذه الوحدات رسم خرائط موثوقة للعيوب، والتحكم السلس في المسار، والتشغيل المستمر في خطوط الأنابيب المحصورة تحت الأرض أو تحت سطح البحر.

المخاطر الخفية في استخدام وحدات القياس بالقصور الذاتي MEMS عالية الدقة: ما يجب على كل مُكامل معرفته
توفر وحدات القياس بالقصور الذاتي الكهروميكانيكية الدقيقة (MEMS IMUs) أداءً لا مثيل له في استشعار الحركة، ولكن بشرط استخدامها بشكل صحيح. يكشف هذا عن أربعة أخطاء استخدام جوهرية تؤدي غالبًا إلى فقدان الدقة، وكيفية تجنبها عند دمجها في التطبيقات العملية.
مزايا وعيوب وحدة القياس بالقصور الذاتي MEMS من هانيويل HG1930
يُعدّ جهاز Honeywell HG1930 وحدة قياس بالقصور الذاتي (IMU) صغيرة الحجم وعالية الأداء، مصممة للاستخدامات التكتيكية، وتتميز بأداء موثوق وتصميم متين، مما يجعلها مثالية للطائرات بدون طيار والروبوتات وأنظمة الدفاع. يوفر هذا الجهاز دقة ثابتة في البيئات القاسية، ولكنه يأتي بتكلفة أعلى ويخضع لقيود التصدير.

نظرة على تقنية تحديد الموقع القائمة على نظام الملاحة بالقصور الذاتي (INS) المستخدمة في القيادة الذاتية
تحقق المركبات ذاتية القيادة دقة تصل إلى مستوى السنتيمتر من خلال تكامل GNSS/INS ورسم خرائط LiDAR والإدراك البصري، مع وحدات IMU عالية الدقة التي تشكل جوهر تحديد الموقع عند فشل إشارات GPS.

هل يمكن لجهاز قياس القصور الذاتي (IMU) وحده القيام بقياس المسافة؟
يمكن لوحدة القياس بالقصور الذاتي (IMU) نظرياً حساب المسافة المقطوعة من خلال التكامل المزدوج، ولكن الانحياز والتشويش يتسببان في انحرافها بشكل كبير مع مرور الوقت. ولذلك، تعتمد أنظمة الملاحة في العالم الحقيقي على دمج بيانات وحدة القياس بالقصور الذاتي مع أنظمة الملاحة العالمية عبر الأقمار الصناعية (GNSS) أو تقنية الليدار (LiDAR) أو الكاميرات للحفاظ على الدقة والاستقرار.
متى يجب إعادة معايرة أو استبدال وحدة قياس القصور الذاتي FOG IMU؟
أعد معايرة وحدة قياس القصور الذاتي FOG IMU كل 12-24 شهرًا للحفاظ على استقرار الانحياز. استبدلها بعد 5-8 سنوات أو عندما يتجاوز الانحراف المواصفات لضمان موثوقية الملاحة على المدى الطويل.