في عملي في تطوير أنظمة الملاحة ، وجدت أن الموثوقية الحقيقية تأتي من الاستقلال - وليس من الاعتماد على الإشارات الخارجية. لهذا السبب تلعب أنظمة الملاحة بالقصور الذاتي (INS) مثل هذا الدور الحاسم: فهي تعمل بالكامل على القياسات الداخلية ، مما يوفر التنقل المتسق والمستمر عبر مجموعة واسعة من البيئات ، من المركبات المستقلة إلى منصات الطيران.
نظام الملاحة بالقصور الذاتي (INS) الموضع والسرعة والتوجيه باستخدام مستشعرات الحركة الداخلية فقط ، مما يتيح التنقل الدقيق عبر مجموعة واسعة من التطبيقات-بما في ذلك الأنظمة المستقلة ، والمنصات تحت الماء ، وعمليات الدفاع المهمة.
قبل اختيار INS لتطبيقك ، فإنه يساعد على بناء فهم واضح لمبادئ العمل وأنواع النظام.
جدول المحتويات

ما هو نظام الملاحة بالقصور الذاتي (INS)؟
نظام الملاحة بالقصور الذاتي (INS) هو نظام مستقل ذاتي يستخدم أجهزة استشعار للحركة الداخلية-مُسريع التسارع والغيروسكوب-لحساب موضع المنصة ، وسرعة ، وتوجيهه باستمرار في الفضاء ثلاثي الأبعاد. نظرًا لأنه لا يعتمد على أي مراجع خارجية ، فإن INS ذات قيمة خاصة في البيئات التي يلزم تنافسها المتسق وغير المنقطعة ، بما في ذلك تطبيقات الدفاع تحت الماء ، تحت الأرض ، والدفاع العالي.
ما هي المكونات الأساسية لـ INS؟
في تجربتي في تصميم حلول INS ، يبدأ كل نظام بثلاثة مكونات أساسية: الجيروسكوبات ، مقاييس التسارع ، ومعالج الملاحة. لتحسين الدقة والاستقرار ، غالبًا ما ندمج أجهزة استشعار إضافية - مثل أجهزة استقبال GNSS ، أو مقاييس المغناطيسية ، أو أجهزة الترجيح البارومترية - لانصهار المستشعر المتقدم. تتيح هذه الهندسة المعمارية لـ INS الحفاظ على تتبع الحركة الموثوق به عبر بيئات متنوعة وصعبة.

الجيروسكوبات
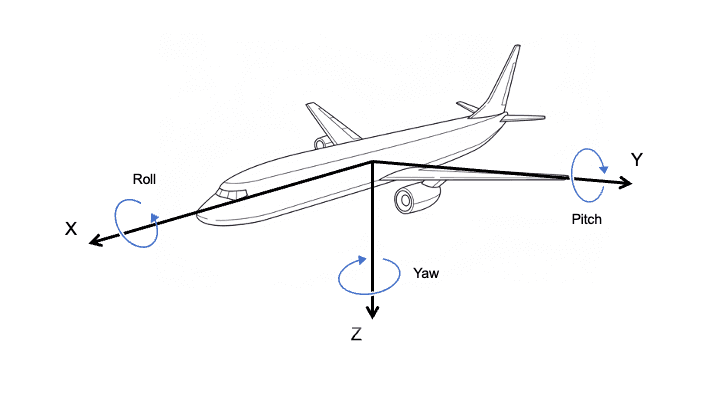
الجيروسكوبات السرعة الزاوية على طول ثلاثة محاور متعامدة (X ، Y ، Z) ، وتوفير بيانات أساسية لاتجاه الحوسبة - الرجل ، الملعب ، وياو. تستخدم Gyroscopes MEMS على نطاق واسع للتطبيقات المضغوطة ، في حين توفر الضباب (الجيروسكوبات البصرية الألياف) و RLG (جيروسكوب الليزر الدائرية) استقرارًا أعلى وطويلة الأجل للأنظمة التكتيكية والفضائية.
مقاييس التسارع
مقاييس التسارع تقيس التسارع الخطي على طول كل محور. عند دمجها بمرور الوقت ، تسفر هذه القيم عن تغييرات في السرعة والإزاحة. تعد مقاييس التسارع عالية الأداء مع انخفاض عدم الاستقرار والضوضاء المنخفضة حاسمة للحفاظ على دقة الموضع مع مرور الوقت.
معالج الملاحة بالقصور الذاتي
يعمل المعالج كنواة حسابية لـ INS. إنه يدمج المدخلات من مستشعرات الحركة ، ويطبق خوارزميات التعويض وتصفية الموضع ، وموضع المخرجات ، والسرعة ، والاتجاه في الوقت الفعلي. تدعم العديد من الأنظمة أيضًا تكامل المستشعر الخارجي والتشخيص في الوقت الفعلي داخل هذه الوحدة.
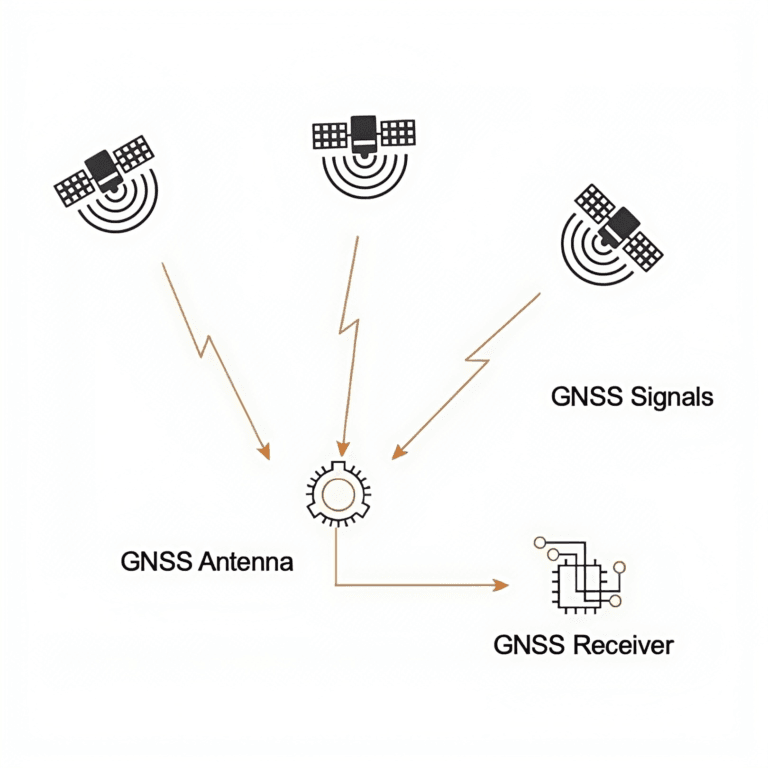
أجهزة الاستقبال GNSS
يدمج عدد متزايد من حلول INS الآن مستقبلات GNSS لتحسين الدقة طويلة الأجل وتحديد المواقع العالمية. من خلال الجمع بين القياسات بالقصور الذاتي وبيانات الأقمار الصناعية-بشكل سيء من خلال تصفية Kalman الممتدة-هذه الأنظمة الهجينة تصحيح الانجراف بشكل فعال وتقدم أداء التنقل القوي عبر المنصات المستقلة وأنظمة الطيران والتطبيقات الجغرافية.
مقاييس المغنطيسية
تساعد المقاييس المغناطيسية في تحديد العنوان عن طريق قياس المجال المغناطيسي للأرض. على الرغم من أنها أقل دقة من الحلول الجيروسكبية ، فإنها توفر مرجعًا مطلقًا مفيدًا-خاصة في التطبيقات المنخفضة الديناميكية أو الداخلية.
أجهزة الترجمة البارومترية
توفر هذه المستشعرات تقديرًا للارتفاع على أساس الضغط الجوي. يتم استخدامها بشكل شائع في الطائرات بدون طيار والطائرات والأنظمة الأرضية التي تتطلب بيانات مرجعية رأسية في البيئات التي قد يكون ارتفاع GNSS غير موثوق بها.
تشكل هذه المكونات معًا نظام تنقل متعدد الاستخدامات قادر على تقديم بيانات حركة عالية معدل في الوقت الفعلي-سواء كانت تعمل كوحدة بالقصور الذاتي الخالص أو كجزء من محلول GNSS/INS متكامل بإحكام مصمم للبيئات الديناميكية المعقدة.
ما هي الأنواع المختلفة من INS: MEMS ، الضباب ، و RLG؟
يمكن تصنيف أنظمة التنقل بالقصور الذاتي نوع تقنية الجيروسكوب التي يستخدمونها. يحدد اختيار التكنولوجيا خصائص الأداء الرئيسية مثل استقرار التحيز والضوضاء والانجراف والتكلفة - مما يجعله أمرًا بالغ الأهمية لتحديد النوع الصحيح لتطبيقك.
1. MEMS INS (أنظمة ميكانيكية ميكانيكية صغيرة)
تم تصميم MEMS INS باستخدام جيروسكوبات ميكانيكية ميكانيكية قائمة على السيليكون ومقاييس التسارع. بفضل التقدم في تصنيع أشباه الموصلات ، يتم استخدام هذه الأنظمة الآن على نطاق واسع في المنصات المدمجة حيث تعد الحجم والوزن والطاقة والتكلفة (SWAP-C) قيودًا كبيرة.



2. ضباب INS (INS القائم على الجيروسكوب الألياف)
يعتمد الضباب Ins على تأثير Sagnac ، باستخدام البصريات الألياف ملفوفة لقياس الدوران. إنه يوفر ثباتًا أعلى بكثير ، وانخفاض الانجراف ، وخطي عامل نطاق أفضل من أنظمة MEMS ، مما يجعله مثاليًا للتنقل التكتيكي.


3. RLG INS (RING LASER GYROSCOSE INS)
يستخدم RLG INS تداخل الليزر في تجويف حلقة مغلقة للكشف عن السرعة الزاوية بدقة عالية للغاية. توفر هذه البنية دقة من الدرجة الاستراتيجية وعادة ما يتم نشرها في الأنظمة التي يكون فيها الأداء بالقصور الذاتي المطلق أمرًا بالغ الأهمية.
| نوع ins | المزايا | القيود | حالات الاستخدام النموذجية |
|---|---|---|---|
| ممس الإضافية |
|
| الطائرات بدون طيار ، روبوتات ، أنظمة يمكن ارتداؤها ، ذخيرة متسكع |
| إضافات الضباب |
|
| منصات الفضاء الجوي ، والسيارات الدفاعية ، والأنظمة البحرية |
| rlg ins |
|
| صواريخ باليستي ، مركبة فضائية ، طائرة راقية |
كيف تعمل INS؟
عند تكوين INS ، أبدأ دائمًا بتحديد موضعه الأولي والسرعة والاتجاه. من هناك ، يعتمد النظام فقط على القياسات بالقصور الذاتي لتقدير كل حالة حركة لاحقة في الوقت الحقيقي.
1. قياس التسارع
يستخدم النظام مقاييس التسارع الثلاثي المحوري لقياس التسارع الخطي في ثلاثة اتجاهات. يتم دمج هذه القيم مع مرور الوقت لحساب السرعة ، ثم دمجها مرة أخرى لحساب التغييرات في الموضع.
2. قياس معدل الزاوي
Gyroscopes تقيس السرعة الزاوية على طول محاور X و Y و Z. تُستخدم هذه القراءات لتحديث اتجاه النظام من خلال تكامل الزاوية الرباعية أو euler.
3. مبدأ حساب الميت
تعمل INS من خلال حساب Dead ، مما يعني أنه يقدر الحالة الحالية استنادًا إلى إدخال المستشعر السابق ومستشعر. هذا يسمح لها بالتنقل دون مراجع خارجية مثل GNSS.
4. تراكم الأخطاء والانجراف
نظرًا لأنه يدمج بيانات المستشعر الصاخبة ، فإن التحيزات والأخطاء الصغيرة (على سبيل المثال ، عدم استقرار التحيز ، خطأ عامل المقياس) تتراكم بمرور الوقت ، مما يؤدي إلى الانجراف في كل من الموضع والاتجاه.
5. اندماج المستشعر والمدخلات المساعدة
لتقليل الانجراف ، غالبًا ما يتم دمج INS مع أجهزة استشعار خارجية مثل GNSS أو سجلات سرعة دوبلر (DVL) أو مقاييس الباروم أو المقاييس المغناطيسية. هذه المصادر المساعدة تصحيح الأخطاء المتراكمة وتوسيع دقة التشغيلية.
تتيح هذه البنية لـ INS تقديم التنقل المستقل في الوقت الفعلي في البيئات التي تكون فيها الإشارات الخارجية محدودة أو تعطيل أو غير متوفرة تمامًا-مثل أثناء الديناميات العالية أو التداخل الكهرومغناطيسي.
ما هي مقاييس الأداء التي تحدد جودة INS؟
عند اختيار نظام الملاحة بالقصور الذاتي ، يعد فهم معلمات الأداء الأساسية أمرًا ضروريًا لضمان تلبية متطلبات المهمة. المقاييس التالية هي الأكثر أهمية:
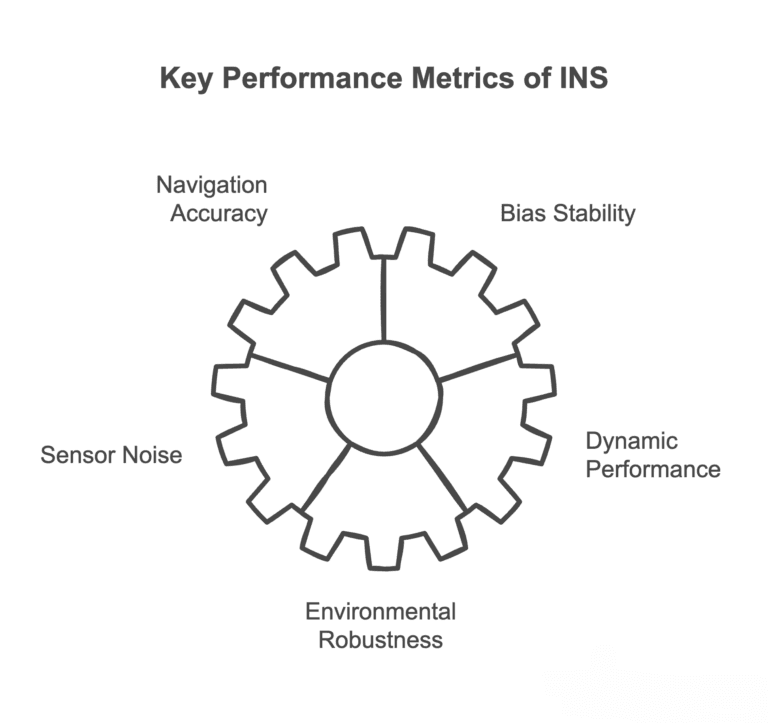
1. دقة الملاحة
تشمل دقة INS الموضع والسرعة وأخطاء الموقف التي تتراكم مع مرور الوقت. الدقة العالية هي أمر بالغ الأهمية للعمليات في البيئات المقطوعة GNSS. يوفر Guidenav GFS120A ، على سبيل المثال ، دقة العنوان البالغة 0.01 درجة (1σ) ، ودقة لفة/الملعب من 0.005 درجة (1σ) ، وتحديد المواقع على مستوى RTK أقل من 2 سم + 1 جزء في المليون ، مع خطأ في السرعة تصل إلى 0.02 م/ث .
2. التحيز الاستقرار
يعكس استقرار التحيز الانجراف على المدى الطويل من الجيروسكوبات ومقاييس التسارع ، مما يؤثر بشكل مباشر على القدرة على التحمل التنقل. يتميز Guidenav GFS120A باستقرار تحيز الجيرور من 0.003 درجة/ساعة واستقرار التحيز في التسارع تحت 20 ميكروغرام ، مما يجعله مناسبًا للتطبيقات المستقلة ذات الدقة العالية والطويلة.
3. ضوضاء المستشعر (المشي العشوائي)
المشي العشوائي يحدد ضوضاء المستشعر على المدى القصير. تشير قيم ARW و VRW السفلية إلى أنظف وأكثر ثباتًا أثناء الحركة.
4. الأداء الديناميكي
تحدد معدل التحديث والكمون وعرض النطاق الترددي مدى سرعة الاستجابة للحركة. الأداء الديناميكي العالي أمر بالغ الأهمية للطائرات بدون طيار والروبوتات والصواريخ.
5. المتانة البيئية
يجب أن تقاوم الاهتزاز ، والصدمة ، ودرجة الحرارة القصوى. يضمن الامتثال لمعايير MIL-STD أو DO-160 الموثوقية في الظروف القاسية.
يتيح فهم هذه المقاييس ومقارنتها للتكامل لاختيار INS المناسبة لمنصةهم ، وموازنة التكلفة ، والدقة ، والمطالب البيئية.
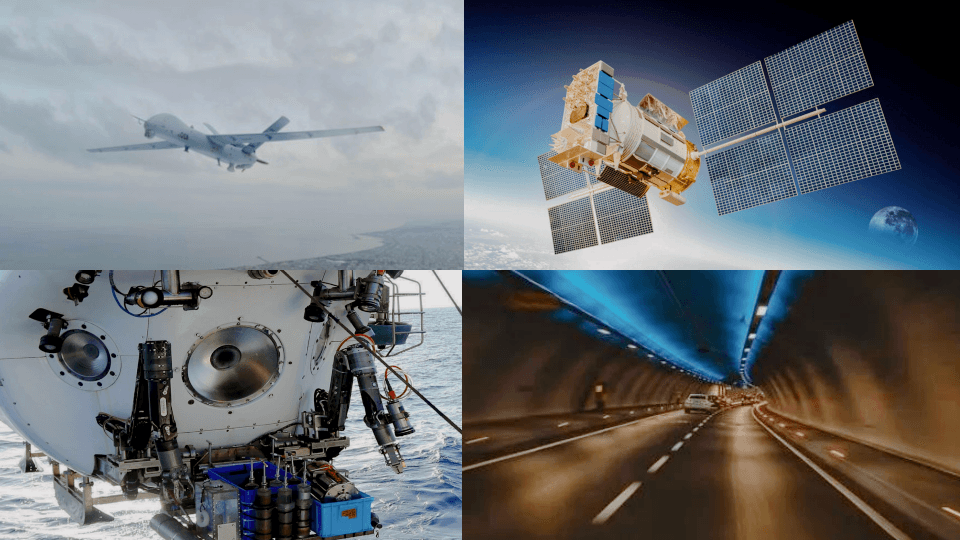
ما هي التطبيقات النموذجية لـ INS عبر الصناعات؟
تُستخدم أنظمة الملاحة بالقصور الذاتي (INS) على نطاق واسع عبر الفضاء والبحرية والدفاع والأنظمة غير المأهولة والأتمتة الصناعية والصناعات تحت الأرض حيث يكون التنقل المستمر المستقل للإشارات أمرًا بالغ الأهمية. في الفضاء ، يتيحون توجيهات الطائرات والصاروخ الدقيقة ؛ في التطبيقات البحرية ، فإنها تدعم الغواصات و AUVs حيث GNSS غير متوفرة. تعتمد أنظمة الدفاع على INS للاستهداف ومراقبة الحرائق والملاحة في البيئات المنقولة عن GPS. تستخدم المنصات غير المأهولة مثل الطائرات بدون طيار و UGVs و UUVs INS لتحديد المواقع في الوقت الفعلي واندماج المستشعر. في الروبوتات الصناعية ، يضمن INS التحكم الدقيق للحركة في AGVs والرافعات. في التعدين والنفق ، تتيح INS تحديد المواقع تحت الأرض الموثوقة لأنظمة الحفر والآلات الثقيلة.
كيف يؤدي Guidenav في صناعة الملاحة بالقصور الذاتي؟
مع أكثر من 15 عامًا من الخبرة ، Guidenav حلولًا عالية الأداء من الملاحة بالقصور الذاتي الذي يثق به تكاملات الدفاع والفضاء والفضاء المستقل في جميع أنحاء العالم.
خطوط إنتاج متنوعة
من MEMS Compact INS لـ الطائرات بدون طيار إلى ضباب عالي الدقة للبحرية والفضاء ، يغطي Guidenav مجموعة كاملة من ملفات تعريف المهمة.
مُحسّن للمبادلة
تم تصميم جميع الأنظمة من أجل الحجم والوزن والطاقة وكفاءة التكلفة - وهي مثالية للمنصات المتنقلة والمدمجة والتكتيكية.
التكامل الهجين جاهز
تدعم منصات INS الخاصة بنا اندماجًا سلسًا مع GNSS و DVL وأجهزة استشعار المساعدة الأخرى عبر واجهات قياسية (UART ، CAN ، Ethernet).
الوعرة والميدان المثبت
تم تصميم وحدات Guidenav لمقابلة MIL-STD-810H ، مقاومة للصدمات ، وتتحمل الاهتزاز ، وتعمل بشكل موثوق في بيئات قاسية.
Guidenav هو الشريك المفضل للتكامل الذين يبحثون عن أنظمة التنقل القصوى المتقدمة (INS) التي تجمع بين الدقة العالية ، والمتانة التشغيلية ، والامتثال الكامل للتصدير للمطالبة بالدفاع والفضاء والمستقل.