هل سبق لك أن حاولت دمج نظام الملاحة ، فقط لإدراك أنه لا يعطي موقفًا على الإطلاق؟
يحدث ذلك عندما يخلط الناس مع IMU و INS. هذا يبدو تقنيًا ، لكن العواقب حقيقية: خيارات الأجهزة الخاطئة ، والميزانية الضائعة ، والأنظمة التي لا تعمل ببساطة كما هو متوقع. الإصلاح؟ فهم الاختلافات الرئيسية بين IMU و INS وما تم تصميم كل واحد فعليًا للقيام به. سيمشي هذا الدليل من خلاله - كل ذلك باللغة الإنجليزية البسيطة.
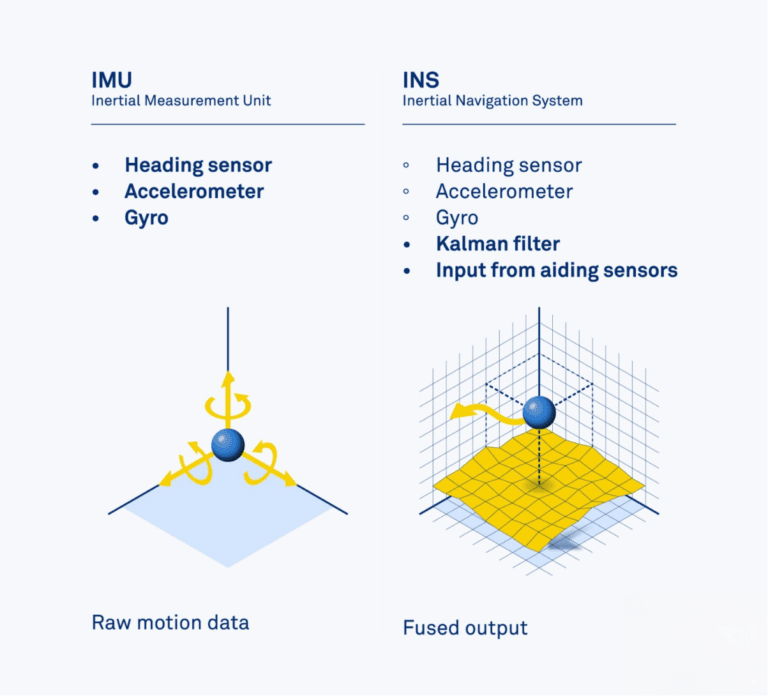
يقيس IMU الحركة ، في حين يستخدم INS بيانات IMU لحساب الموضع والاتجاه مع مرور الوقت - IMU هو مستشعر ، INS هو نظام.
دعنا نزيل الارتباك - خطوة بخطوة.
جدول المحتويات

ما هو IMU؟
وحدة القياس بالقصور الذاتي (IMU) هي جهاز استشعار يقيس التسارع والسرعة الزاوية . عادةً ما يتم تصميمها باستخدام MEMS أو FOG أو HRG Technologies ، وتشمل IMU مقاييس التسارع ، الجيروسكوبات ، وأحيانًا مقاييس المغناطيسية . إنه يخرج بيانات بالقصور الذاتي الخام المستخدمة لتقدير الحركة في الفضاء. تستخدم IMUS على نطاق واسع في الطائرات بدون طيار والروبوتات والمركبات والهواتف الذكية. ومع ذلك ، فإنهم لا يوفرون موقفًا أو اتجاهًا ، ما لم يتم دمجه مع المعالجة الإضافية. تختلف IMUS في الدقة ، من أجهزة استشعار منخفضة التكلفة من الدرجة التجارية المنخفضة التكلفة إلى أجهزة الاستشعار التكتيكية والتجنيدية مثل GMMS400 من Guidenav.

ما هو INS؟
نظام الملاحة بالقصور الذاتي (INS) هو نظام كامل يستخدم بيانات IMU لحساب الموضع والسرعة والموقف في الوقت الفعلي. ويشمل عادة:
- IMU مضمن
- معالج قوي على متن الطائرة
- خوارزميات اندماج المستشعر (مثل ، مرشح Kalman )
- في كثير من الأحيان ، وحدة GNSS للمساعدة
تقوم INS بتكامل في الوقت الفعلي لمخرجات IMU لتوفير حل تنقل مستمر. ولهذا السبب ، يمكن أن تعمل حتى في البيئات المنقولة عن GNSS لفترة محدودة ، مما يجعلها ضرورية في المهام الفضائية والبحرية والمستقلة . أنظمة مثل Guidenav من GFS120 و Guide2D مثالا مثل هذا التكامل.
كيف تختلف Imus و inss؟
معظم الناس يبسطونها بالقول: "إن الإضافات مجرد وحدة IMU مع وحدة GNSS." من الناحية الفنية ، هذه بداية - لكنها بعيدة عن الصورة الكاملة.
نعم ، تتضمن INS IMU في جوهرها. ولكنه يدمج أيضًا معالجًا أو GNSS (غالبًا مع دعم RTK أو SBAs) ، وأحيانًا أجهزة استشعار المساعدة الخارجية مثل ترميز العجلات ، وأجهزة استشعار السرعة الجوية ، أو أجهزة الترجيح البارومترية ، أو سجلات سرعة دوبلر (DVL) . تتيح هذه الإضافات لـ INS دمج البيانات في الوقت الفعلي ، مما لا يقتصر على الحركة-ولكن تقديرات الثقة العالية للموضع والسرعة والاتجاه.
فكر في IMU كمقياس حرارة - يخبرك بالبيانات الأولية. INS هو تقرير الطقس: تم تصفيته ، تنصهر ، وجاهز للعمل.
| ميزة | IMU | الإضافية |
|---|---|---|
| الوظيفة الأساسية | يقيس التسارع والدوران | يحسب الموضع الكامل والسرعة والاتجاه |
| عناصر | مقياس التسارع ، الجيروسكوب | IMU + GNSS + Processor + أجهزة استشعار اختيارية |
| الإخراج | بيانات الحركة الخام | بيانات الملاحة المنصهرة (في الوقت الفعلي) |
| دعم GNSS | لا أحد | مدمج (RTK/SBAS اختياري) |
| مساعدة خارجية | لا ينطبق | عداد المسافات ، DVL ، السرعة الجوية ، مقياس الارتفاع ، إلخ. |
هل يمكنك التنقل مع IMU فقط؟
فكر في IMU مثل الشعور بالحركة مع عينيك مغلقة. يمكنك أن تخبرك أنك تتقدم إلى الأمام أو تحول - ولكن ليس لديك أي فكرة عن مكان وجودك. هذا ما يحدث عندما تحاول التنقل باستخدام IMU فقط.
بالتأكيد ، يمكنك دمج التسارع بمرور الوقت لتقدير الموقف. لكن الأخطاء الصغيرة تتراكم بسرعة ، وتحول إلى أخطاء ضخمة في غضون ثوان. وهذا ما يسمى الانجراف ، ويجعل Imus مستقل غير موثوق بالملاحة.
إنها رائعة للتثبيت على المدى القصير-مثل الاحتفاظ بمستوى gimbal-ولكن ليس لمعرفة مكانك أو إلى أين أنت ذاهب. لذلك ، تحتاج إلى ins.
كيف تقوم INS بمعالجة بيانات IMU؟
على عكس IMU ، الذي يستشعر فقط الحركة ، يفسر INS هذا الحركة ويحولها إلى رؤية ملاحة كاملة. يتضمن ذلك معرفة مكانك ، ومدى سرعة تحركك ، والاتجاه الذي تواجهه. لكن هذا لا يحدث تلقائيًا. إنه يتطلب سلسلة من الخطوات المصممة بعناية-فيزياء التنصت ، والرياضيات ، والتصحيح في الوقت الفعلي-لتحويل الإشارات الأولية إلى تنقل موثوق.
دعنا نسير خلال العملية:
1. حركة المعنى (إدخال IMU)
يبدأ كل شيء بـ IMU ، الذي يقيس باستمرار التسارع (عبر مقاييس التسارع) والمعدل الزاوي (عبر الجيروسكوبات). تعكس هذه القيم كيف يتحرك النظام في الفضاء ثلاثي الأبعاد.
➡ تعطي هذه الخطوة الإقرار الوعي بحركة الخام.
2. حساب السرعة والموقف
يدمج INS التسارع للحصول على السرعة ، ثم يدمج السرعة لتقدير الموضع مع مرور الوقت. هذا يخبر النظام إلى أي مدى سافرت من نقطة البداية.
➡ هذه هي الطريقة التي تتتبع بها حركة INS - حتى بدون GPS.
3. تقدير التوجه
من خلال معالجة بيانات الجيروسكوب والمرجعية المتجهات مثل الجاذبية والمجال المغناطيسي للأرض ، يحدد INS Roll و Pitch و Yaw - اتجاهك ثلاثي الأبعاد الكامل.
➡ تساعد هذه الخطوة النظام على فهم كيفية تدويره أو إمالةه.
4. تطبيق اندماج المستشعر للدقة
بيانات IMU وحدها تنجرف بمرور الوقت. تستخدم INS الخوارزميات الذكية - مثل مرشحات Kalman - لدمج إدخال IMU مع أجهزة استشعار أخرى:
- GNSS / RTK / SBAS
- أجهزة قياس العجلات
- أجهزة استشعار DVL أو AirSpeed
- أجهزة الترجمة البارومترية
تعمل هذه التصحيحات على تحسين الدقة والاستقرار على المدى الطويل.
➡ الانصهار يبقي النظام موثوقًا به ، حتى عندما تفقد بعض المستشعرات الإشارة.
5. تقديم ناتج الملاحة في الوقت الفعلي
الناتج النهائي هو دفق مستمر في الوقت الفعلي للموضع والسرعة والمواقف-المرح عدة مرات في الثانية ، وجاهزة للاستخدام من قبل وحدات تحكم الطيران أو الطيار الآلي أو أنظمة التعيين.
➡ هذا هو ما يجعل INS حل التنقل الكامل.
تتبع منتجات Guidenav INS هذه البنية-مع محركات الاندماج التي تم ضبطها للظروف المنقولة عن GNSS والبيئات الديناميكية والمنصات ذات الاهتزاز العالي. النتيجة: التنقل الذي يمكن الاعتماد عليه يمكنك الوثوق به عندما يكون الأمر أكثر أهمية.
متى يكون IMU بما يكفي لتطبيقك؟
IMU هو كل ما تحتاجه إذا كان نظامك يحتاج فقط إلى الشعور بالحركة ، وليس حساب الموقف أو التوجه بمرور الوقت. إنه مثالي عندما تتفاعل مع الحركة ، وعدم محاولة تتبع الموقع المطلق.
تشمل حالات الاستخدام الشائعة:
تثبيت الكاميرا
يكتشف الاهتزاز أو الميل لمساعدة المحركات على الحفاظ على الثبات.
تتبع لفتة
في AR/VR أو الأجهزة القابلة للارتداء ، حيث تتبع الحركة - ليس موضعًا دقيقًا.
التوجيه قصير الأجل
تستخدم في الطائرات بدون طيار أو الروبوتات أثناء بدء التشغيل أو التحوم أو المناورات السريعة.
دعم التحكم في الطيران
يقترن مع GNSS أو التدفق البصري ، يوفر IMUS ردود فعل سريعة لتثبيت الطائرات بدون طيار.
فقط ضع في اعتبارك: Imus فقط يعطي تسارعًا خامًا وتناوبًا. إذا كنت بحاجة إلى اتجاه أو سرعة ، فسيتعين عليك بناء الرياضيات بنفسك - المرشحين ، وتصحيح الانجراف ، وأكثر من ذلك.
إذا كان ذلك ضمن قدرة نظامك ، فإن IMU هو خفيف الوزن وبأسعار معقولة وفعالة .
متى تحتاج حقًا إلى INS كامل؟
تحتاج إلى إزاحة كاملة عندما يجب أن يعرف نظامك الموضع والاتجاه الدقيق في جميع الأوقات - خاصة في البيئات التي قد تفشل فيها GNSS أو غير متوفرة.
تشمل حالات الاستخدام النموذجية:
- البيئات المنقولة عن GNSS: مثل الأنفاق أو في الداخل أو تحت الماء أو الوازية الحضرية
- منصات عالية الديناميكية: مثل الطائرات بدون طيار والصواريخ والسيارات على الطرق الوعرة التي تحتاج إلى تحديثات سريعة ودقيقة
- حساب ميت: حيث يجب أن يحافظ النظام على التنقل بين إشارات GNSS - أو بدون GNSS على الإطلاق
- المهام الدقيقة الحرجة: مثل رسم الخرائط أو الاستهداف أو القيادة المستقلة
في هذه الحالات ، سوف ينجرف IMU وحده بسرعة ، مما يؤدي إلى نتائج غير موثوقة. تقوم ins بحل هذا عن طريق دمج البيانات بالقصور الذاتي مع GNSS وأجهزة استشعار اختيارية مثل DVL ، أو المقاييس odometers ، أو المقاييس.
ما هي الأخطاء الشائعة في اختيار IMU أو INS؟
لنكن صادقين - عندما يتعلق الأمر بأجهزة الاستشعار بالقصور الذاتي ، من السهل إجراء المكالمة الخاطئة ، خاصة إذا كنت جديدًا في هذا المجال. لقد رأيت فرقًا تختار الأداة الخاطئة مرات أكثر مما يمكنني الاعتماد عليه. ونادراً ما يتعلق الأمر بالتكنولوجيا - إنه يتعلق بسوء فهم المشكلة.

هنا عادة ما تنطلق الأمور عن المسار:
الخطأ رقم 1: التفكير في IMU يمنحك موقفًا
لا. يخبرك IMU فقط مدى سرعة التحرك أو الدوران. إذا كنت تأمل في الخروج من الإحداثيات في الوقت الفعلي خارج الصندوق-فستخيب أملك.
الخطأ رقم 2: استخدام IMU للمبتدئين للحصول على وظيفة شاقة
قد يبدو مستشعر منخفض التكلفة جيدًا على الورق ، ولكن بمجرد ربطه بالطائرة بدون طيار أو روبوت سريع الحركة ، فإن الضوضاء والانجراف ستدمر بياناتك.
الخطأ رقم 3: دفع ثمن إقرار عندما يكون IMU قد فعلت الخدعة
إذا كان كل ما تحتاجه هو تثبيت الكاميرا أو اكتشاف الاتجاه الأساسي ، فسيكون الإضافات الكاملة مبالغة. لا تحل مشكلة 300 دولار مع حل 3000 دولار.
الخطأ رقم 4: نسيان البيئة الواقعية
مواصفات المختبر لا تعكس دائمًا الأداء الميداني. الاهتزاز العالي أو درجات الحرارة المتطرفة أو أحمال الصدمة يمكن أن تتخلص من أجهزة استشعار رخيصة بسرعة.
الخطأ رقم 5: التقليل من جهد التكامل
بيانات IMU RAW ليست التوصيل والتشغيل. إذا لم يكن لديك البرامج المناسبة أو المرشحات أو الخوارزميات في مكانها ، فإن أفضل مستشعر سيخضع لضعف.
ما هو الدعم الذي يقدمه Guidenav للاختيار IMU/INS؟
في Guidenav ، نحن لا نقوم فقط بشحن أجهزة استشعار - نحن نساعدك على بناء النظام الصحيح . نقدم:
- استشارات تطبيق فردية
- IMU/INS مطابقة الأداء
- أدلة التكامل للطائرات بدون طيار ، ugvs ، والأنظمة البحرية
- مجموعات وصول ورقة البيانات وتقييمها
- دعم هندسة الاستجابة السريعة
سواء كنت تقوم ببناء نظام الطائرات بدون طيار منخفضة الطاقة أو نظام ملاحة من GNSS ، فإننا نساعدك على الاختيار بين MEMS IMU أو FOG IMU أو INS كاملة بناءً على ملف تعريف مهمتك.