جدول المحتويات
- ما هو IMU؟
- مكونات وحدة القياس بالقصور الذاتي
- كيف تعمل وحدة القياس بالقصور الذاتي؟
- المركبات ذاتية القيادة وذاتية القيادة
- الفضاء والطيران
- الروبوتات
- الواقع الافتراضي (VR) والواقع المعزز (AR)
- الأجهزة الطبية
- التحليلات الرياضية والتقاط الحركة
- الالكترونيات الاستهلاكية
- MEMS IMU vs FOG IMU: الاختلافات الرئيسية
- MEMS IMU: نظرة عامة وخصائص
- FOG IMU: نظرة عامة وخصائص
- مؤشرات أداء IMU
- طرق معايرة IMU
- مزايا وحدات القياس بالقصور الذاتي
- حدود وحدات القياس بالقصور الذاتي
- IMU vs AHRS (النظام المرجعي للموقف والعنوان)
- IMU مقابل INS (نظام الملاحة بالقصور الذاتي)
- أنواع مختلفة من IMUs ونظرة عامة على السوق الخاصة بها
- الاتجاهات المستقبلية وتطوير وحدة قياس القصور الذاتي
مقدمة
وحدات القياس بالقصور الذاتي (IMUs) حاسمة في صناعات التكنولوجيا الفائقة اليوم، بما في ذلك المركبات ذاتية القيادة، والروبوتات، والفضاء. ومع ذلك، على الرغم من استخدامها على نطاق واسع، لا يزال الكثير منها يكافح من أجل فهم كامل لكيفية عمل وحدات IMU وإمكاناتها. وبدون هذا الفهم، هناك خطر حدوث عدم كفاءة وأخطاء في أداء النظام. في هذه المقالة، سوف نستكشف أساسيات IMUs وتطبيقاتها والاتجاهات المستقبلية، مما يضمن حصولك على أقصى استفادة من هذه التكنولوجيا.
وحدة القياس بالقصور الذاتي (IMU) هي جهاز يقيس التسارع والسرعة الزاوية وأحيانًا المجالات المغناطيسية لتحديد اتجاه الجسم وموضعه. تعد وحدات IMU ضرورية في أنظمة الملاحة والتحكم وتتبع الحركة. من خلال الجمع بين بيانات المستشعر، تتيح وحدات IMU التتبع الدقيق للحركة والاتجاه في البيئات التي قد تكون فيها إشارات GPS ضعيفة أو غير متوفرة.
مستقبل IMUs مثير، مع اتجاهات مثل دمج أجهزة الاستشعار وتكامل الذكاء الاصطناعي التي تفتح إمكانيات جديدة. دعونا نتعمق في كيفية عمل هذه الأنظمة وما يخبئه المستقبل لدورها في التقنيات المتطورة.
أساسيات وحدة القياس بالقصور الذاتي (IMU)
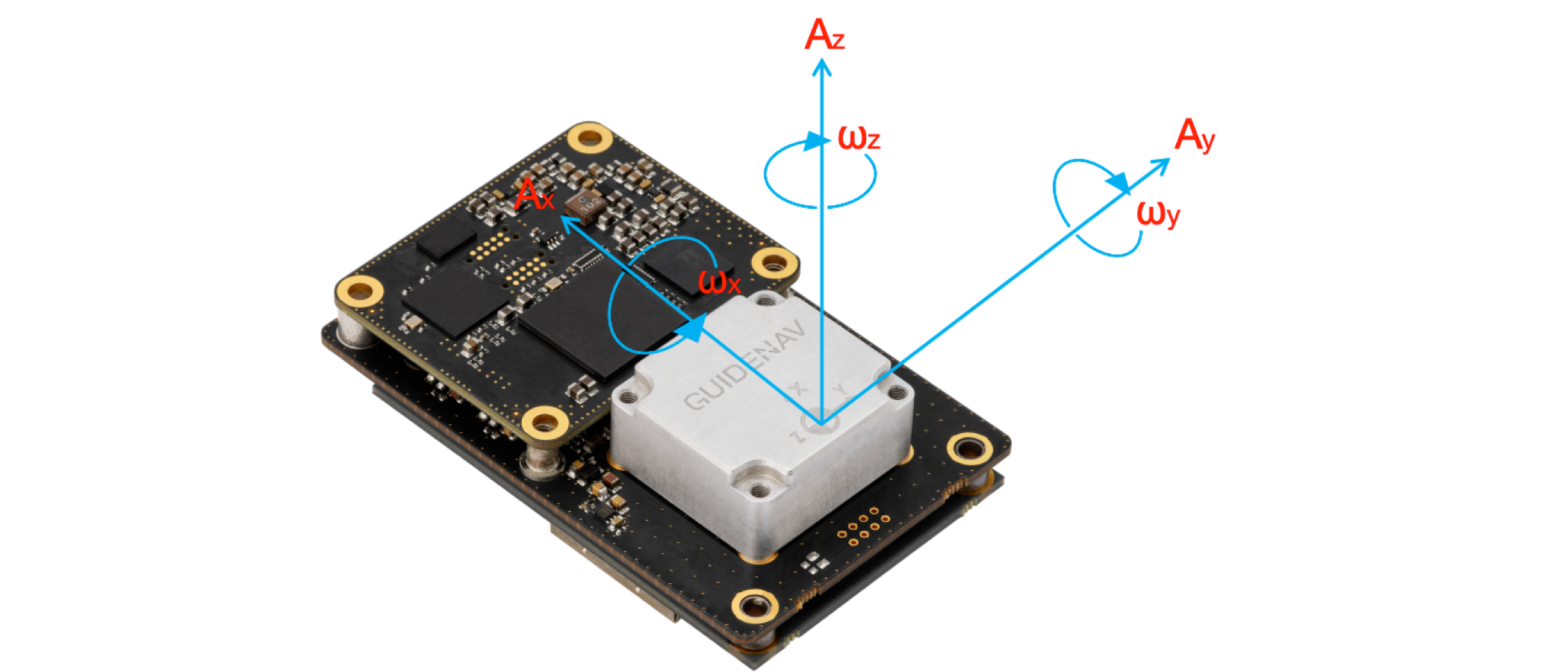
مكونات وحدة القياس بالقصور الذاتي
تتضمن وحدة IMU عادةً أجهزة الاستشعار الرئيسية التالية. دعونا نقسمها وننظر في كيفية مساهمة كل منها في الوظيفة العامة:
| عنصر | وظيفة | الإخراج |
|---|---|---|
| مقياس التسارع | يقيس التسارع الخطي على طول المحاور X وY وZ. | يوفر بيانات عن السرعة والتشريد. |
| جيروسكوب | يقيس السرعة الزاوية (معدل الدوران) حول المحاور X وY وZ. | يوفر بيانات عن التوجه (الموقف). |
| مقياس المغناطيسية (اختياري) | يقيس قوة المجال المغناطيسي واتجاهه بالنسبة للمجال المغناطيسي للأرض. | يوفر العنوان (اتجاه البوصلة). |
يلعب كل من هذه المستشعرات دورًا حاسمًا في توفير بيانات الحركة في الوقت الفعلي، مما يساعدنا على فهم كيفية تحرك الجسم ودورانه في الفضاء.
كيف تعمل وحدة القياس بالقصور الذاتي؟
إليك كيفية قيامنا، في GuideNav ، بتصميم وحدات IMU لتعمل بسلاسة:
- قياس التسارع : مقياس التسارع التغيرات في السرعة على طول ثلاثة محاور. تسمح لنا هذه البيانات بتحديد مدى سرعة تسارع الجسم أو تباطؤه، وهو أمر بالغ الأهمية لتتبع الإزاحة بمرور الوقت.
- قياس السرعة الزاوية : الجيروسكوب مقدار دوران الجسم حول كل محور من المحاور الثلاثة. من خلال دمج هذه البيانات الدورانية مع مرور الوقت، يمكن لوحدة IMU أن تخبرنا بالاتجاه الدقيق للجسم في الفضاء.
- قياس المجال المغناطيسي (اختياري) : في حالة تضمينه، مقياس المغناطيسية المجال المغناطيسي للأرض، مما يوفر اتجاه البوصلة. ويساعد هذا في تصحيح أي انحراف في قراءات الجيروسكوب، مما يضمن بقاء IMU دقيقًا على مدار فترات طويلة.
في GuideNav ، نستخدم خوارزميات دمج أجهزة الاستشعار لدمج البيانات من هذه المكونات. ومن خلال القيام بذلك، نقوم بإنشاء تمثيل دقيق للغاية لموضع الكائن واتجاهه في الفضاء ثلاثي الأبعاد.
تطبيقات وحدات القياس بالقصور الذاتي (IMUs)
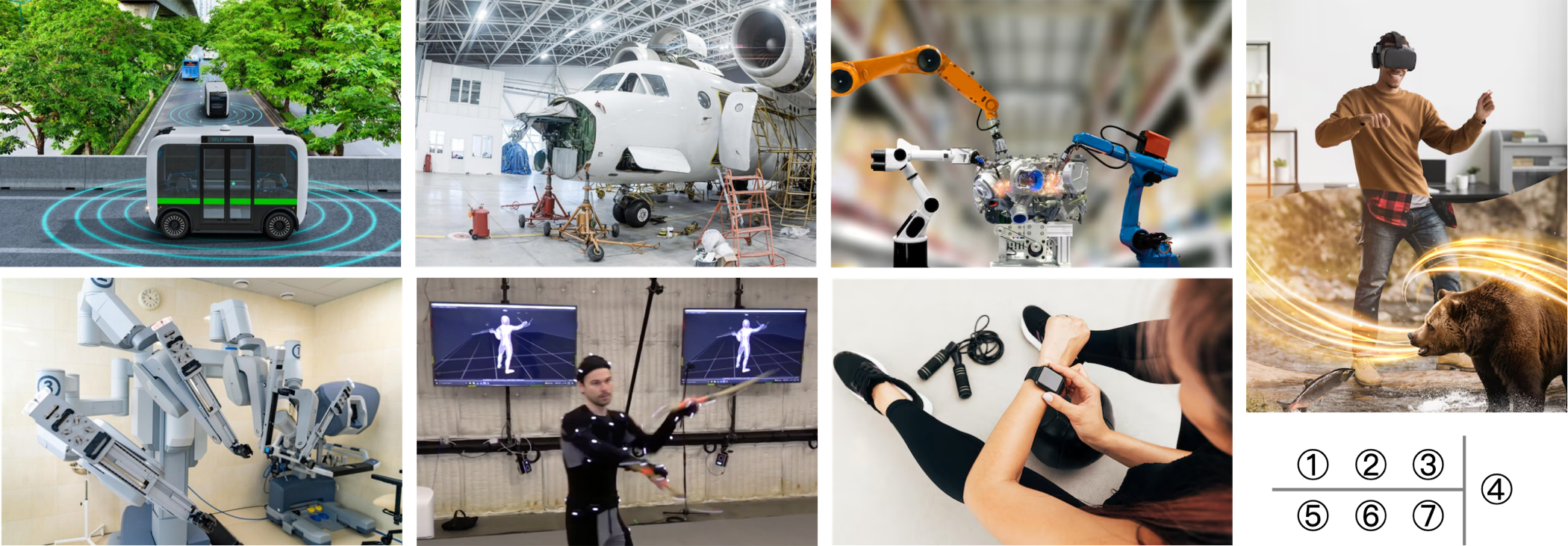
تُستخدم وحدات قياس القصور الذاتي (IMUs) في نطاق واسع من التطبيقات، حيث توفر بيانات أساسية عن التسارع والسرعة الزاوية وأحيانًا المجالات المغناطيسية. إن دقتها وتعدد استخداماتها تجعلها حاسمة في صناعات مثل المركبات ذاتية القيادة، والفضاء، والروبوتات، والواقع الافتراضي، والرعاية الصحية، والتحليلات الرياضية، والإلكترونيات الاستهلاكية. أدناه، سوف نستكشف بعض التطبيقات الرئيسية حيث لا غنى عن وحدات IMU.
1. المركبات ذاتية القيادة وذاتية القيادة
تعتبر وحدات IMU حاسمة في تطوير وتشغيل المركبات ذاتية القيادة . فهي تساعد على تتبع حركة السيارة واتجاهها في الوقت الفعلي، مما يضمن الاستقرار والتنقل الدقيق. في حين أن نظام تحديد المواقع العالمي (GPS) تُستخدم غالبًا لتحديد المواقع، وحدات IMU ضرورية عندما تكون إشارات نظام تحديد المواقع العالمي (GPS) ضعيفة أو غير متوفرة (على سبيل المثال، في الأنفاق أو الأخاديد الحضرية أو المناطق النائية).
| طلب | دور IMU |
|---|---|
| سيارات ذاتية القيادة | يوفر بيانات عن اتجاه السيارة وحركتها لتمكين التنقل المستقر. |
| طائرات بدون طيار | يضمن التحكم الدقيق في مسار الرحلة وموقعها. |
| المركبات الروبوتية | يتتبع الحركة في البيئات على الطرق الوعرة أو البيئات التي لا يتوفر فيها نظام تحديد المواقع العالمي (GPS). |
2. الفضاء والطيران
لطالما كانت وحدات IMU جزءًا لا يتجزأ من صناعات الطيران والفضاء . أنها توفر بيانات في الوقت الحقيقي عن اتجاه وحركة الطائرات والمركبات الفضائية. تُستخدم وحدات IMU في كل من الطيران التجاري واستكشاف الفضاء ، مما يوفر موثوقية ودقة عالية في البيئات الصعبة حيث قد لا يكون نظام تحديد المواقع العالمي (GPS) متاحًا أو عمليًا.
| طلب | دور IMU |
|---|---|
| ملاحة الطائرات | يوفر بيانات الموقف (الاتجاه) لرحلة مستقرة. |
| الملاحة الفضائية | يضمن التوجيه الدقيق والتحكم في الحركة في الفضاء. |
| توجيه القمر الصناعي | يحافظ على اتجاه القمر الصناعي ومساره أثناء التشغيل. |
3. الروبوتات
في علم الروبوتات ، تُستخدم وحدات IMU لمراقبة حركة الروبوتات وتوجيهها وتوازنها، سواء في التطبيقات الصناعية أو الطبية أو الاستهلاكية. توفر وحدات IMU ردود فعل لأنظمة التحكم في الروبوت، مما يضمن حركة سلسة ودقيقة في مجموعة متنوعة من البيئات.
| طلب | دور IMU |
|---|---|
| الروبوتات الصناعية | يضمن حركة مستقرة أثناء مهام التصنيع. |
| الروبوتات الطبية | يوفر التحكم الدقيق في الحركة للعمليات الجراحية وإعادة التأهيل. |
| الروبوتات المستقلة | يتتبع الموضع والاتجاه للتنقل في البيئات الديناميكية. |
4. الواقع الافتراضي (VR) والواقع المعزز (AR)
في عالم الواقع الافتراضي (VR) والواقع المعزز (AR) ، تعد وحدات IMU مكونات أساسية لتتبع حركات الرأس والجسم للمستخدمين. ومن خلال قياس الدوران والتسارع وأحيانًا المجالات المغناطيسية، توفر وحدات IMU بيانات الحركة في الوقت الفعلي التي تعزز التجربة الغامرة.
| طلب | دور IMU |
|---|---|
| سماعات الواقع الافتراضي | يتتبع حركات الرأس لضبط البيئة الافتراضية. |
| أجهزة الواقع المعزز | يراقب حركات اليد للتفاعل مع الأشياء الافتراضية. |
| التحكم بالإيماءات | يتعرف على إيماءات المستخدم للتفاعل داخل أنظمة AR/VR. |
5. الأجهزة الطبية
يتم دمج وحدات IMU بشكل متزايد في الأجهزة الطبية لمجموعة متنوعة من الأغراض، بما في ذلك تتبع الحركة وإعادة التأهيل والتشخيص. إن قدرتهم على قياس الحركات الدقيقة تجعلهم لا يقدرون بثمن لفهم ومراقبة تقدم المريض.
| طلب | دور IMU |
|---|---|
| إعادة التأهيل البدني | يراقب حركات المرضى أثناء العلاج لتتبع التقدم. |
| الأجهزة القابلة للارتداء | يتتبع اضطرابات الحركة، كما هو الحال في المرضى الذين يعانون من مرض باركنسون. |
| التقاط الحركة للتشخيص | يقيس الحركات غير الطبيعية لأغراض التشخيص. |
6. التحليلات الرياضية والتقاط الحركة
تُستخدم وحدات IMU على نطاق واسع في التحليلات الرياضية والتقاط الحركة لمراقبة أداء الرياضيين وتحسين تحركاتهم. يساعد تتبع الحركة الدقيق الذي توفره IMUs في الوقاية من الإصابات وتحليل الأداء وتحسينه.
| طلب | دور IMU |
|---|---|
| الأداء الرياضي | يتتبع بيانات الحركة لتحليل السرعة والتسارع والكفاءة. |
| الوقاية من الإصابة | يراقب الحركات لتحديد المخاطر وتحسين التدريب. |
| التقاط الحركة | يلتقط الحركة البشرية لاستخدامها في الأفلام والرسوم المتحركة والألعاب. |
7. الالكترونيات الاستهلاكية
يتم أيضًا تضمين وحدات IMU في العديد من الإلكترونيات الاستهلاكية ، مثل الهواتف الذكية والأجهزة القابلة للارتداء وأجهزة التحكم في الألعاب. تستخدم هذه الأجهزة وحدات IMU لاكتشاف الحركة والاتجاه، مما يتيح ميزات متنوعة ويعزز تجربة المستخدم.
| طلب | دور IMU |
|---|---|
| الهواتف الذكية | لتمكين تدوير الشاشة وعناصر التحكم القائمة على الحركة وتتبع النشاط. |
| أجهزة تتبع اللياقة البدنية | يراقب عدد الخطوات والمسافة والنشاط البدني. |
| وحدات تحكم الألعاب | يتتبع حركات اللاعب للحصول على تجارب ألعاب غامرة. |
أنواع وحدات القياس بالقصور الذاتي (IMU): MEMS IMU وFOG IMU
بالقصور الذاتي (IMUs) ضرورية في العديد من الصناعات، وخاصة في الدفاع والفضاء حيث تعد الدقة العالية أمرًا بالغ الأهمية. النوعان الرئيسيان من وحدات IMU، MEMS IMUs (الأنظمة الكهروميكانيكية الدقيقة) و FOG IMUs (IMUs جيروسكوب الألياف البصرية) ، يختلفان بشكل كبير من حيث الأداء والحجم والتكلفة والملاءمة لمختلف التطبيقات.
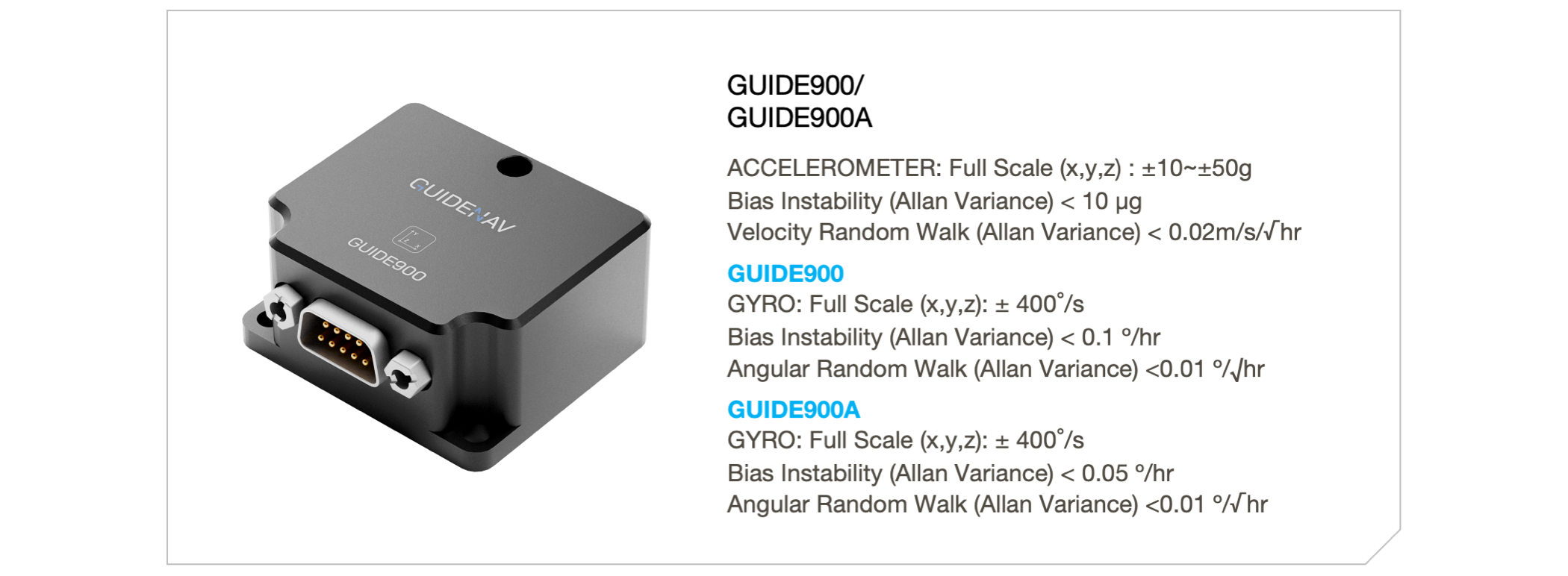
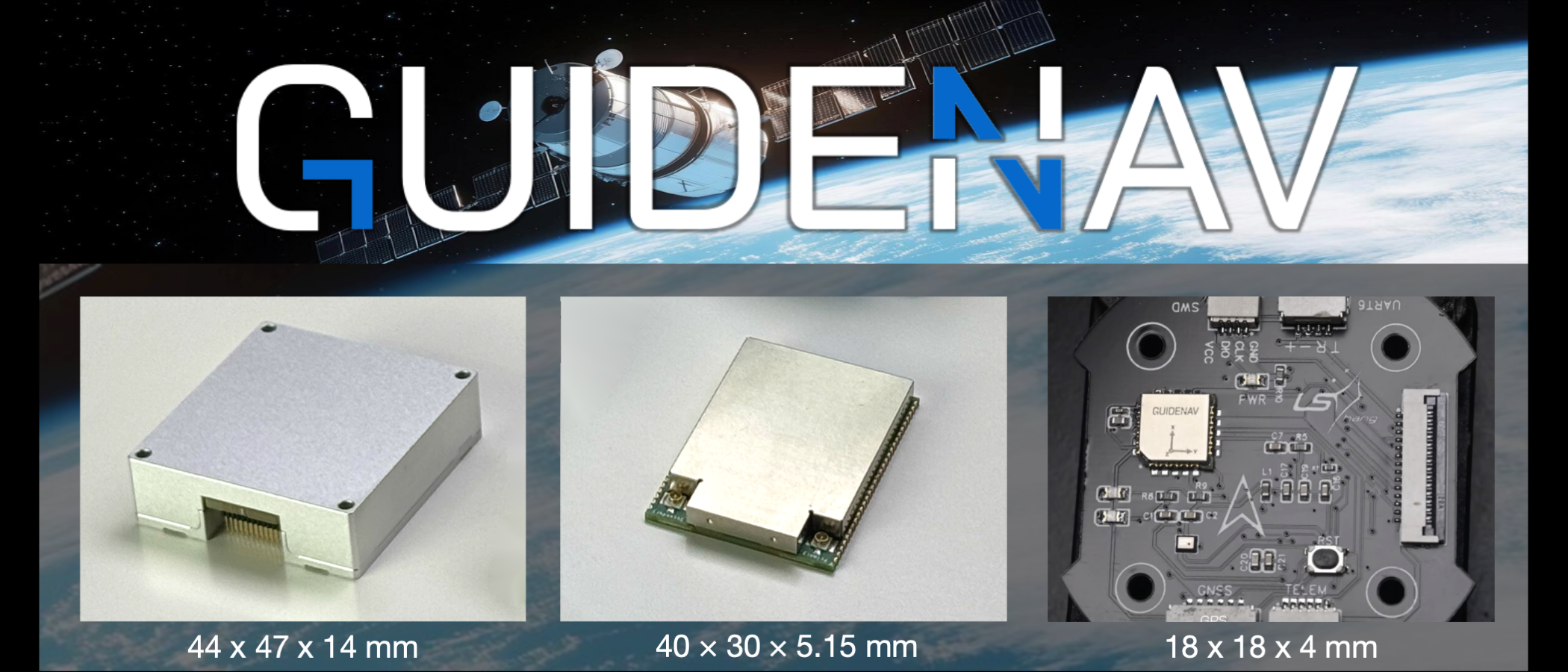
على الرغم من أن وحدات FOG IMUs تُستخدم تقليديًا في مجالات عالية الدقة مثل الفضاء الجوي والدفاع والروبوتات، إلا أن التطورات الحديثة في وحدات IMUs MEMS ، مثل GUIDE900 و GUIDE900A ، توفر الآن مستويات دقة تبلغ 0.1 درجة/ساعة و 0.05 درجة/ساعة ، وهي FOG IMU للمبتدئين . يسمح هذا التحسين باستخدام وحدات IMU MEMS التطبيقات عالية الدقة التي كانت تهيمن عليها سابقًا FOG IMUs .
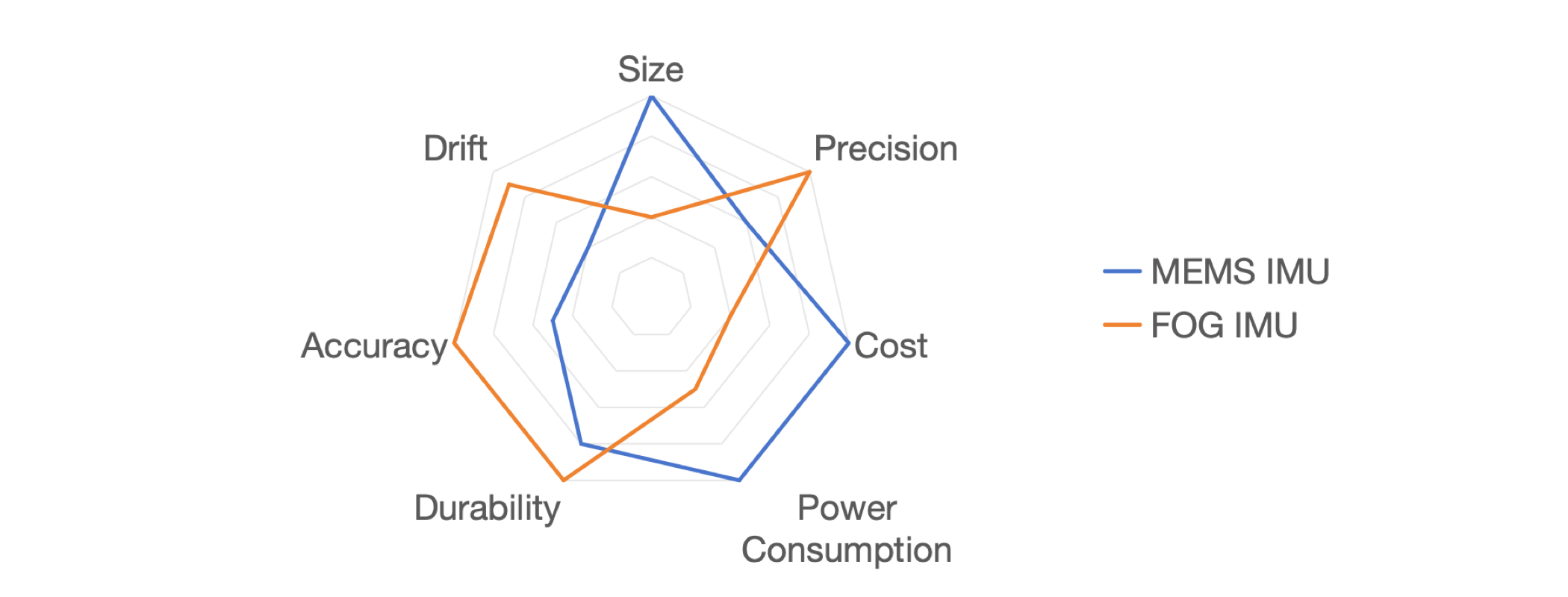
MEMS IMU vs FOG IMU: الاختلافات الرئيسية
| المعلمة | MEMS IMU | الضباب IMU |
|---|---|---|
| تكنولوجيا | استنادًا إلى الأنظمة الكهروميكانيكية الدقيقة (MEMS) . | يستخدم جيروسكوبات الألياف الضوئية (FOGs) لقياس السرعة الزاوية. |
| مقاس | صغير الحجم وخفيف الوزن ، مثالي للأجهزة المحمولة. | أكبر وأكثر قوة ومناسبة للتطبيقات الدقيقة في الأنظمة واسعة النطاق. |
| دقة | دقة معتدلة، ولكن أحدث وحدات MEMS IMU عالية الدقة يمكنها تحقيق 0.1 درجة/ساعة أو 0.05 درجة/ساعة . | دقة عالية للغاية، والحد الأدنى من الانجراف، وأكثر استقرارًا بمرور الوقت. |
| يكلف | منخفضة التكلفة، مما يجعلها مثالية لتطبيقات السوق الشامل. | ارتفاع التكلفة بسبب التكنولوجيا المتقدمة المستخدمة في الأنظمة المتطورة. |
| استهلاك الطاقة | استهلاك منخفض للطاقة ، مناسب للأجهزة التي تعمل بالبطارية. | استهلاك أعلى للطاقة، وهو مناسب بشكل أفضل للأنظمة ذات ميزانيات الطاقة الأعلى. |
| متانة | أقل متانة في ظل الظروف البيئية القاسية. | متين للغاية، قادر على التعامل مع البيئات القاسية. |
| دقة | مناسبة للتطبيقات ذات الدقة المنخفضة إلى المتوسطة. | دقة عالية، مناسبة للملاحة والثبات عالي الدقة. |
| التطبيقات | الإلكترونيات الاستهلاكية، وأنظمة السيارات، والطائرات بدون طيار، والطائرات بدون طيار، و**الأنظمة العسكرية**. | الفضاء الجوي والدفاع والروبوتات الصناعية وأنظمة الملاحة المتطورة. |
| الانجراف | ارتفاع الانجراف مع مرور الوقت، مما يتطلب إعادة المعايرة. | انحراف منخفض جدًا، مثالي للتشغيل على المدى الطويل دون إعادة المعايرة. |
| وقت الاستجابة | استجابة أسرع بسبب الحجم الأصغر والتصميم الأبسط. | استجابة أبطأ قليلاً ولكنها توفر استقرارًا أعلى بمرور الوقت. |
MEMS IMU: نظرة عامة وخصائص
تستخدم وحدات القياس العصبي MEMS I الأنظمة الكهروميكانيكية الدقيقة (MEMS) ، حيث يتم دمج المكونات الميكانيكية الصغيرة مع الإلكترونيات على شريحة دقيقة. تتمثل المزايا الرئيسية لوحدات MEMS IMU في صغر حجمها ، وتكلفتها المنخفضة ، واستهلاكها المنخفض للطاقة . تجعل هذه الميزات وحدات MEMS IMU مثالية للتطبيقات في مجال الإلكترونيات الاستهلاكية وأنظمة السيارات وبشكل متزايد في التطبيقات العسكرية أيضًا.
في GuideNav ، نحن فخورون بشكل خاص بوحدات MEMS IMU مثل GUIDE900 و GUIDE900A ، والتي توفر دقة تبلغ 0.1 درجة/ساعة و 0.05 درجة/ساعة على التوالي، مما يجعلها مناسبة لبعض التطبيقات عالية الدقة بواسطة FOG IMUs .
الميزات الرئيسية لوحدات MEMS IMU:
- حجم صغير : مثالي للتطبيقات المدمجة، مثل الهواتف الذكية والأجهزة القابلة للارتداء والطائرات العسكرية بدون طيار .
- منخفضة التكلفة : مثالية للتطبيقات ذات الكميات الكبيرة، مثل أنظمة السيارات والإلكترونيات الاستهلاكية وأنظمة الدفاع التي تحتاج إلى تحقيق التوازن بين الأداء والقدرة على تحمل التكاليف.
- دقة متوسطة : في حين أن وحدات IMU MEMS تقدم تقليديًا دقة أقل من وحدات FOG IMU ، إلا أن النماذج عالية الدقة تعمل الآن على سد هذه الفجوة في العديد من التطبيقات الدفاعية.
- استهلاك منخفض للطاقة : كفاءة عالية للأجهزة التي تعمل بالبطاريات، وهو أمر بالغ الأهمية للطائرات العسكرية بدون طيار ، وأنظمة الأسلحة الذكية ، وغيرها من تقنيات الدفاع المتنقلة.
تطبيقات MEMS IMUs:
- الدفاع : يستخدم في الطائرات العسكرية بدون طيار ، وأنظمة الملاحة للمركبات المدرعة ، وأنظمة توجيه الصواريخ . تستفيد هذه التطبيقات من وحدات MEMS IMU ومنخفضة التكلفة.
- الأجهزة الإلكترونية الاستهلاكية : توجد في الهواتف الذكية ، وأجهزة تتبع اللياقة البدنية ، وأجهزة التحكم في الألعاب .
- أنظمة السيارات : تستخدم في التحكم في ثبات السيارة والملاحة الذاتية .
- الطائرات بدون طيار والطائرات بدون طيار : توفير التوجيه والاستقرار في الطائرات العسكرية بدون طيار والطائرات بدون طيار من الدرجة الاستهلاكية .
FOG IMU: نظرة عامة وخصائص
تستخدم وحدات FOG IMUs جيروسكوبات الألياف الضوئية (FOGs) لقياس السرعة الزاوية، مما يمكنها من توفير دقة وثبات عاليين للغاية. وهذا يجعل وحدات FOG IMU مثالية للتطبيقات التي تتطلب الحد الأدنى من الانجراف والموثوقية على المدى الطويل، مثل الملاحة الجوية وتوجيه الصواريخ والروبوتات المتطورة .
في حين أن وحدات IMU للضباب تحظى بتقدير واسع النطاق لدقتها ومتانتها، وحدات MEMS IMU تعمل على سد الفجوة في الأداء، لا سيما في التطبيقات العسكرية حيث تعتبر التكلفة والحجم واستهلاك الطاقة من الاعتبارات الرئيسية.
الميزات الرئيسية لوحدات FOG IMU:
- دقة عالية : وحدات FOG IMU انجرافًا منخفضًا للغاية، مما يجعلها مثالية للتطبيقات عالية الدقة مثل الملاحة عبر الأقمار الصناعية وأنظمة التوجيه العسكري.
- المتانة : مع القدرة على التعامل مع الظروف البيئية القاسية، وحدات FOG IMU مثالية للأنظمة الفضائية والعسكرية التي تحتاج إلى العمل في بيئات قاسية.
- استهلاك أعلى للطاقة : وحدات FOG IMU عمومًا المزيد من الطاقة، مما يجعلها أكثر ملاءمة للأنظمة ذات موارد الطاقة الكافية.
- حجم أكبر : وحدات FOG IMU أكبر حجمًا مقارنة بوحدات MEMS IMU ، ولهذا السبب يتم استخدامها في أنظمة أكبر مثل الطائرات والمركبات الفضائية .
تطبيقات وحدات IMU للضباب:
- الفضاء الجوي : يُستخدم في الملاحة الجوية والأقمار ، حيث تكون الدقة العالية والاستقرار أمرًا بالغ الأهمية.
- الدفاع : يستخدم على نطاق واسع في توجيه الصواريخ ، والمركبات العسكرية بدون طيار ، وأنظمة الملاحة العسكرية .
- الروبوتات المتطورة : تستخدم في الروبوتات الصناعية والروبوتات الجراحية وأنظمة الملاحة المستقلة حيث تكون الدقة والاستقرار على المدى الطويل ضروريين.
متى تختار MEMS IMU مقابل FOG IMU
| حالة الاستخدام | MEMS IMU | الضباب IMU |
|---|---|---|
| الالكترونيات الاستهلاكية | مثالي للهواتف الذكية والأجهزة القابلة للارتداء وأجهزة تتبع اللياقة البدنية. | غير مناسب بسبب التكلفة العالية واستهلاك الطاقة. |
| الفضاء والطيران | مناسبة للأنظمة الصغيرة منخفضة التكلفة ذات متطلبات الدقة المعتدلة. | ضروري لأنظمة الملاحة والتوجيه عالية الدقة. |
| المركبات ذاتية القيادة | جيد للحلول منخفضة التكلفة مع متطلبات أداء معتدلة. | ضروري للتنقل عالي الدقة في البيئات المعقدة. |
| العسكرية والدفاع | يُستخدم في **الطائرات العسكرية بدون طيار** و**أنظمة الملاحة** للمركبات** و**أنظمة توجيه الصواريخ**. | يستخدم على نطاق واسع لتوجيه الصواريخ والطائرات بدون طيار والملاحة في الظروف الصعبة. |
| الروبوتات | مناسبة للروبوتات المخصصة للمستهلكين أو المشاريع التعليمية. | يُفضل استخدام الروبوتات الصناعية والروبوتات الجراحية وغيرها من الأنظمة القائمة على الدقة. |
وحدة القياس بالقصور الذاتي (IMU) الأداء والمعايرة
يمكن أن يتأثر أداء وحدات القياس بالقصور الذاتي (IMUs) بعوامل مختلفة، مثل انحراف المستشعر ودرجة الحرارة والظروف البيئية. لضمان الأداء الأمثل، من الضروري فهم مؤشرات الأداء الرئيسية (KPIs) لوحدات IMU وطرق المعايرة المستخدمة لتعزيز دقتها.
مؤشرات أداء IMU
أداء وحدة القياس بالقصور الذاتي (IMU) بناءً على عدة عوامل رئيسية تؤثر بشكل مباشر على دقتها وموثوقيتها. فيما يلي أهم مؤشرات الأداء لوحدات IMU:
| مؤشر الأداء | وصف |
|---|---|
| استقرار التحيز | اتساق قراءات IMU مع مرور الوقت. سيكون لوحدة IMU المستقرة الحد الأدنى من الانحراف في القياسات. |
| عامل القياس | النسبة بين الحركة الجسدية الفعلية ومخرجات IMU. وأي أخطاء في هذه النسبة يمكن أن تؤدي إلى تفسير غير صحيح للبيانات. |
| ضوضاء | اختلافات عشوائية في قراءات أجهزة الاستشعار IMU. تشير مستويات الضوضاء المنخفضة إلى دقة أعلى في القياسات. |
| المشي العشوائي | يصف الانجراف في القياسات مع مرور الوقت. يشير إلى مدى انحراف القياس عن قيمته الحقيقية بسبب الضوضاء العشوائية. |
| دقة | أصغر تغيير يمكن قياسه في قراءات مستشعر IMU. تعمل الدقة الأعلى على تحسين دقة القياسات. |
| اللاخطية | الانحراف عن العلاقة المستقيمة بين المدخلات والمخرجات. يمكن أن تسبب اللاخطية أخطاء عند التسارعات الأعلى أو السرعات الزاوية. |
| حساسية درجة الحرارة | الاختلاف في قياسات IMU بسبب التغيرات في درجة الحرارة المحيطة. تعد وحدات IMU ذات الحساسية المنخفضة لدرجة الحرارة أكثر دقة في الظروف البيئية المتقلبة. |
طرق معايرة IMU
تعد المعايرة عملية حيوية تساعد على تحسين دقة وحدة القياس بالقصور الذاتي (IMU) عن طريق تصحيح الأخطاء التي قد تنشأ عن انحراف المستشعر وعدم المحاذاة وعوامل أخرى. تشتمل معايرة IMU عادةً على ثلاثة أنظمة استشعار أساسية: مقياس التسارع ، والجيروسكوب ، ومقياس المغناطيسية . يتطلب كل من هذه المستشعرات تقنيات معايرة محددة لضمان قياسات دقيقة وموثوقة.
1. معايرة مقياس التسارع
مقياس التسارع في IMU التسارع الخطي على طول المحاور X وY وZ. ومع ذلك، فإنه غالبًا ما يكون عرضة لأخطاء مثل انحرافات عامل القياس، واختلال المحاذاة، وعدم تعامد المحاور.
| طريقة المعايرة | وصف |
|---|---|
| معايرة ثابتة | طريقة شائعة حيث يتم وضع IMU في اتجاه معروف (على سبيل المثال، مسطح على السطح). ومن خلال قياس تسارع الجاذبية (9.81 م/ث²)، يمكن تصحيح أخطاء المستشعر. |
| المعايرة الديناميكية | يتضمن تحريك IMU من خلال تسارعات واتجاهات مختلفة معروفة لتصحيح أخطاء عامل القياس والتحيز وعدم المحاذاة بين المحاور. |
| تعويض درجة الحرارة | وبما أن مقاييس التسارع حساسة لدرجة الحرارة، فإن المعايرة تتضمن أيضًا التعويض عن التغيرات في درجات الحرارة التي قد تسبب أخطاء في القياس. |

2. معايرة الجيروسكوب
الجيروسكوب السرعة الزاوية حول محاور X وY وZ الخاصة بوحدة IMU . يمكن أن تعاني الجيروسكوبات من الانحراف (حيث تتغير قراءات المستشعر ببطء مع مرور الوقت) وعدم استقرار التحيز (حيث يوجد إزاحة ثابتة في القياسات).
| طريقة المعايرة | وصف |
|---|---|
| معايرة إزاحة معدل الصفر | في هذه الطريقة، يتم وضع الجيروسكوب في وضع ثابت (بدون حركة)، ويتم قياس الإزاحة أو التحيز وتصحيحها. |
| معايرة جدول الأسعار | يتضمن ذلك تدوير IMU بسرعات زاوية مختلفة معروفة لتحديد أي أخطاء غير خطية أو أخطاء في عامل القياس. |
| معايرة درجة الحرارة | كما هو الحال مع مقاييس التسارع، فإن الجيروسكوبات حساسة للتغيرات في درجات الحرارة. تفسر المعايرة الاختلافات في سلوك المستشعر عند درجات حرارة مختلفة. |
تضمن معايرة الجيروسكوب أن تكون قراءات السرعة الزاوية لـ IMU دقيقة وخالية من الانحراف، مما يؤدي إلى تحسين أدائها في البيئات الديناميكية.
3. معايرة مقياس المغناطيسية
مقياس المغناطيسية قوة واتجاه المجال المغناطيسي للأرض، مما يوفر بيانات الاتجاه المستخدمة لتحديد الاتجاه. يمكن أن تتأثر مقاييس المغناطيسية بالاضطرابات المغناطيسية المحلية، واختلال أجهزة الاستشعار، والأخطاء في عامل القياس.
| طريقة المعايرة | وصف |
|---|---|
| معايرة الحديد الصلب | تعوض هذه الطريقة تشوهات المجال المغناطيسي التي تسببها مكونات IMU الخاصة (مثل الأجهزة الإلكترونية). |
| معايرة الحديد الناعم | يصحح التشوهات الناجمة عن البيئة المحيطة أو المواد القريبة من IMU. |
| معايرة متعددة النقاط | يتعرض مقياس المغناطيسية لمجموعة متنوعة من قوى واتجاهات المجال المغناطيسي المعروفة لاكتشاف الأخطاء وتصحيحها. |
تعد معايرة مقياس المغناطيسية ضرورية لتحقيق بيانات دقيقة عن الاتجاه والاتجاه، خاصة عند استخدام IMU في بيئات ذات ظروف مغناطيسية مختلفة.
مزايا وقيود وحدات القياس بالقصور الذاتي (IMUs)
توفر وحدات القياس بالقصور الذاتي أداءً استثنائيًا في الوقت الفعلي، واستقلالية عن الأنظمة الخارجية، كما أنها قابلة للتكيف بشكل كبير عبر الصناعات. ومع ذلك، فإن انجرافها ، والحساسية البيئية ، ونماذج الدقة عالية التكلفة تحتاج إلى أخذها في الاعتبار عند اختيار التكنولوجيا المناسبة. وحدات IMUs MEMS توازنًا بين التكلفة والأداء للعديد من التطبيقات الاستهلاكية والصناعية، في حين أن وحدات FOG IMUs هي الاختيار الأمثل عالية الدقة وطويلة الأمد في مجال الطيران والدفاع. يساعدك فهم نقاط القوة والقيود في وحدات IMU على اختيار أفضل نظام يناسب احتياجاتك الخاصة.
مزايا وحدات القياس بالقصور الذاتي
| ميزة | وصف |
|---|---|
| دقة عالية في البيئات الديناميكية | توفر وحدات IMU قياسات في الوقت الفعلي للتسارع والسرعة الزاوية، وهي ضرورية للتطبيقات في المركبات ذاتية القيادة والفضاء والروبوتات ، حيث لا يتوفر نظام تحديد المواقع العالمي (GPS) أو مراجع خارجية أخرى . |
| الاستقلال عن الإشارات الخارجية | تعمل وحدات IMU دون الاعتماد على إشارات خارجية مثل نظام تحديد المواقع العالمي (GPS) ، مما يجعلها موثوقة للغاية في بيئات مثل الملاحة تحت الأرض ، استكشاف الفضاء ، أو الروبوتات الداخلية . |
| مدمجة وخفيفة الوزن | وحدات MEMS IMU بأنها صغيرة وخفيفة الوزن، ومثالية لتطبيقات مثل الأجهزة القابلة للارتداء والطائرات بدون طيار والإلكترونيات الاستهلاكية حيث تعد المساحة والوزن أمرًا بالغ الأهمية. |
| استهلاك منخفض للطاقة | وحدات MEMS IMU بأنها موفرة للطاقة، ومثالية للأجهزة التي تعمل بالبطارية مثل الساعات الذكية وأجهزة تتبع اللياقة البدنية التي تحتاج إلى العمل لفترات طويلة. |
| معالجة البيانات في الوقت الحقيقي | توفر وحدات IMU بيانات عالية التردد ومنخفضة الكمون، مما يجعلها مناسبة للتحكم في الوقت الفعلي في الروبوتات ، وتثبيت الطائرات بدون طيار ، وملاحة المركبات . |
| المتانة في البيئات القاسية | لوحدات FOG IMU وحدات MEMS IMU المتطورة أن تتحمل الظروف القاسية مثل الاهتزازات العالية وتغيرات درجات الحرارة والصدمات ، مما يجعلها مثالية للتطبيقات العسكرية والفضائية . |
حدود وحدات القياس بالقصور الذاتي
| القيد | وصف |
|---|---|
| الانجراف مع مرور الوقت | انجرافات الجيروسكوبات في وحدات IMU بمرور الوقت، مما يؤدي إلى قياسات غير دقيقة ما لم تتم إعادة معايرتها بانتظام. هذه مشكلة مهمة في التطبيقات طويلة الأمد. |
| الحساسية البيئية | تعتبر وحدات IMU حساسة للظروف البيئية مثل درجة الحرارة والاهتزازات ، والتي يمكن أن تحدث أخطاء، خاصة في وحدات IMU MEMS الأكثر عرضة لهذه الاضطرابات. |
| التكلفة العالية (للنماذج عالية الدقة) | في حين أن وحدات IMUs MEMS فعالة من حيث التكلفة، وحدات IMU عالية الدقة مثل وحدات FOG IMU باهظة الثمن وقد لا تكون مناسبة لجميع التطبيقات بسبب تكلفتها العالية واستهلاكها للطاقة. |
| الدقة على المدى القصير مقابل الاستقرار على المدى الطويل | توفر وحدات IMU دقة كبيرة على المدى القصير ، ولكن بدون تصحيح خارجي (على سبيل المثال، GPS )، فإنها تواجه عدم استقرار على المدى الطويل - وهو تحدي لمهام الملاحة عالية الدقة على مدى فترات طويلة. |
| التعقيد في دمج البيانات | غالبًا ما تتطلب وحدات IMU دمج أجهزة الاستشعار (على سبيل المثال، دمج نظام تحديد المواقع العالمي (GPS ) وأجهزة قياس المغناطيسية ) لتصحيح الأخطاء بمرور الوقت، مما يضيف التعقيد والحمل الحسابي إلى النظام. |
| دقة محدودة في الديناميكيات العالية | في التطبيقات عالية الديناميكية ، وحدات MEMS IMU مع دقة وحدات IMU للضباب ، خاصة في تطبيقات مثل توجيه الصواريخ أو توجيه المركبات الفضائية ، والتي تتطلب دقة عالية جدًا. |
وحدة القياس بالقصور الذاتي (IMU) مقابل أنظمة القصور الذاتي الأخرى: IMU vs AHRS، IMU vs INS
تعتبر وحدات القياس بالقصور الذاتي (IMUs) ضرورية في العديد من تطبيقات التكنولوجيا المتقدمة، ولكنها ليست الأنظمة الوحيدة المتاحة لقياس الحركة والتوجيه والملاحة. الأنظمة المرجعية للمواقف والتوجهات (AHRS) وأنظمة الملاحة بالقصور الذاتي (INS) نظامين آخرين شائعي الاستخدام يعتمدان أيضًا على أجهزة الاستشعار بالقصور الذاتي. بينما توفر وحدات IMU البيانات الأساسية لكل من AHRS وINS، فإن هذه الأنظمة توفر إمكانات إضافية ومصممة لحالات استخدام محددة. دعنا نستكشف كيفية IMUs مع AHRS و INS .
IMU vs AHRS (النظام المرجعي للموقف والعنوان)
وحدات IMU و AHRS لتتبع التوجيه والحركة، لكنهما يختلفان من حيث الميزات الإضافية وحالات الاستخدام الخاصة بكل منهما.
| المعلمة | IMU | AHRS |
|---|---|---|
| تعريف | **وحدة قياس القصور الذاتي (IMU)** تقيس التسارع والسرعة الزاوية، وتوفر بيانات الحركة الأولية. | يجمع **النظام المرجعي للموقف والعنوان (AHRS)** بين **بيانات IMU** وأجهزة استشعار إضافية (على سبيل المثال، أجهزة قياس المغناطيسية) لتوفير بيانات الاتجاه والعنوان. |
| عناصر | يتضمن هذا عادةً **مقاييس التسارع** و**الجيروسكوبات**، وأحيانًا **مقاييس المغناطيسية**. | يستخدم **بيانات IMU** (مقاييس التسارع والجيروسكوبات) بالإضافة إلى **مقاييس المغناطيسية** وأحيانًا أجهزة الاستشعار الأخرى (على سبيل المثال، **GPS**، **مقاييس البارومترات**). |
| الإخراج | يوفر التسارع الخام وبيانات السرعة الزاوية. | اتجاه المخرجات (الموقف) والعنوان (اتجاه البوصلة) في إطار عالمي (على سبيل المثال، الشمال والشرق والأسفل). |
| دقة | توفر وحدات IMU تتبعًا دقيقًا للحركة ولكنها قد تعاني من **الانجراف** بمرور الوقت بسبب أخطاء المستشعر. | يعمل AHRS على تحسين الدقة باستخدام مراجع خارجية (أجهزة قياس المغناطيسية ونظام تحديد المواقع العالمي)، مما يقلل الانحراف بمرور الوقت. |
| تعقيد | أبسط في التصميم والتشغيل، عادةً لتتبع الحركة الأساسية. | أكثر تعقيدا بسبب الإضافية |
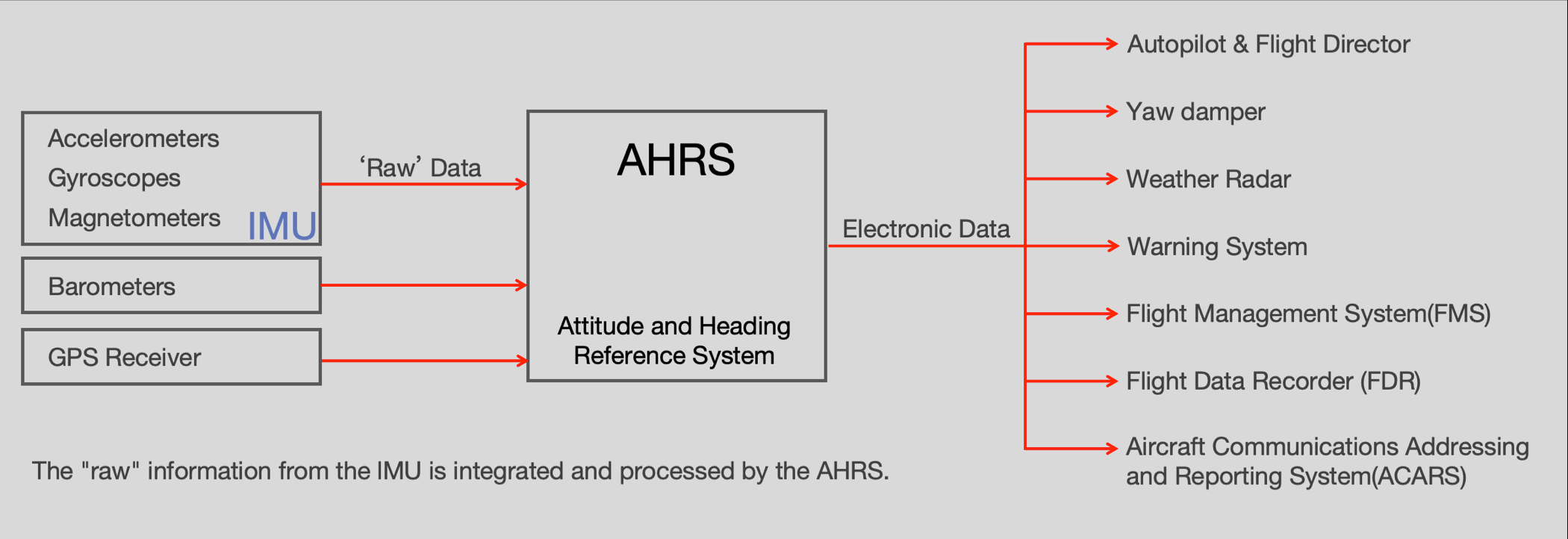
الفرق الرئيسي : توفر وحدات IMU AHRS بدمج هذه البيانات مع أجهزة استشعار أخرى (مثل أجهزة قياس المغناطيسية) لتقديم اتجاه وعنوان دقيقين. AHRS عادةً عندما تكون هناك حاجة إلى معلومات دقيقة عن الموقف والعنوان.
IMU مقابل INS (نظام الملاحة بالقصور الذاتي)
نظام الملاحة بالقصور الذاتي (INS) هو نظام أكثر تقدمًا يدمج IMU مع إمكانات معالجة إضافية، وغالبًا ما يستخدم خوارزميات مثل تصفية كالمان لحساب موضع الكائن وسرعته واتجاهه.
| المعلمة | IMU | الإضافية |
|---|---|---|
| تعريف | **وحدة قياس القصور الذاتي (IMU)** تقيس التسارع والسرعة الزاوية، وتوفر بيانات الحركة الأولية. | يجمع **نظام الملاحة بالقصور الذاتي (INS)** بين **IMU** والمعالجة الحسابية (على سبيل المثال، مرشح كالمان) لتتبع الموقع والسرعة والاتجاه. |
| عناصر | يتضمن **مقاييس التسارع** و**الجيروسكوبات**؛ في بعض الأحيان **مقاييس المغناطيسية**. | يجمع بين **IMU** و**خوارزميات** لدمج أجهزة الاستشعار، وأحيانًا أجهزة استشعار أخرى (على سبيل المثال، **GPS**). |
| الإخراج | يوفر بيانات التسارع والسرعة الزاوية. | توفر المخرجات **الموضع**، و**السرعة**، و**الاتجاه**، بيانات تنقل كاملة. |
| دقة | تتمتع وحدات IMU بدقة محدودة بمرور الوقت بسبب الانجراف. | تعمل **INS** على تحسين الدقة بمرور الوقت عن طريق دمج بيانات IMU مع الخوارزميات وفي بعض الأحيان التصحيحات الخارجية (مثل نظام تحديد المواقع العالمي). |
| تعقيد | بسيطة، وتوفير بيانات الحركة فقط. | معقدة بسبب دمج البيانات، ومعالجة أجهزة الاستشعار، والحاجة إلى الخوارزميات الحسابية. |
| التطبيقات | يُستخدم لتتبع الحركة الأساسية، كما هو الحال في الطائرات بدون طيار والسيارات والروبوتات. | يُستخدم في **الملاحة** في **الطائرات** و**الغواصات** و**المركبات الفضائية** و**التطبيقات العسكرية**، حيث يكون تتبع الموقع على المدى الطويل أمرًا بالغ الأهمية. |
الفرق الرئيسي : بينما وحدات IMU الحركة والاتجاه، INS تلك البيانات جنبًا إلى جنب مع الخوارزميات لحساب الموقع والسرعة والاتجاه مما يوفر حلاً كاملاً للتنقل.
سوق وحدات القياس بالقصور الذاتي والتطوير المستقبلي: الأنواع وتوقعات السوق والاتجاهات
تعد وحدات القياس بالقصور الذاتي (IMUs) جزءًا لا يتجزأ من أنظمة الملاحة الحديثة وتتبع الحركة والتحكم في الاستقرار عبر مختلف الصناعات. الطلب المتزايد على الأنظمة الذاتية ، والروبوتات ، والفضاء ، والإلكترونيات الاستهلاكية إلى دفع تطور تقنيات IMU، مما أدى إلى زيادة اعتمادها في جميع أنحاء العالم. مع استمرار توسع سوق وحدات IMU، من الضروري فهم الأنواع المختلفة من وحدات IMU، وظروف السوق الحالية، والاتجاهات التي تشكل تطورها المستقبلي.
أنواع مختلفة من IMUs ونظرة عامة على السوق الخاصة بها
تأتي وحدات IMU في أشكال مختلفة، كل منها يلبي متطلبات مختلفة من حيث الدقة والحجم والتكلفة والأداء. الأنواع الأكثر استخدامًا من وحدات IMU هي وحدات MEMS IMU ووحدات FOG IMU و RLG IMUs (وحدات IMU لجيروسكوب الليزر الحلقي) . ولكل منها خصائصها الفريدة، مما يجعلها مناسبة لتطبيقات محددة. دعونا نلقي نظرة على هذه الأنواع وسيناريوهات السوق الحالية.
1. وحدات IMU للأنظمة الكهروميكانيكية الدقيقة
وحدات MEMS IMU هي الأكثر استخدامًا نظرًا لحجمها الصغير وتكلفتها المنخفضة واستهلاكها المنخفض للطاقة . تعتمد وحدات IMU هذه على أجهزة استشعار الأنظمة الكهروميكانيكية الدقيقة (MEMS) لقياس التسارع والسرعة الزاوية. تعد وحدات MEMS IMU مناسبة جدًا للإلكترونيات الاستهلاكية وتطبيقات السيارات والأنظمة منخفضة التكلفة.
| مميزة | MEMS IMU |
|---|---|
| مقاس | مدمجة وصغيرة وخفيفة الوزن. |
| يكلف | منخفضة التكلفة، مما يجعلها في متناول الجميع لاعتمادها على نطاق واسع في الأسواق. |
| دقة | دقة متوسطة، على الرغم من أن الطرازات الأحدث تحقق دقة أعلى (على سبيل المثال، **0.1 درجة/ساعة**). |
| التطبيقات | يُستخدم في **الإلكترونيات الاستهلاكية** و**أنظمة السيارات** و**الطائرات بدون طيار** و**الروبوتات** و**الأجهزة القابلة للارتداء**. |
| نمو السوق | نمو قوي مدفوع بـ **الهواتف الذكية** و**سلامة السيارات** و**تكنولوجيا الطائرات بدون طيار** و**أجهزة إنترنت الأشياء**. |
توقعات السوق لوحدات IMU MEMS:
سوق وحدات IMU للأنظمة الكهروميكانيكية الدقيقة في النمو نظرًا لقدرتها على تحمل التكاليف وتعدد استخداماتها. وتستخدم وحدات IMU بشكل متزايد في الهواتف الذكية ، والأجهزة القابلة للارتداء ، وأنظمة سلامة السيارات ، وتثبيت الطائرات بدون طيار ، والروبوتات . السيارات والإلكترونيات الاستهلاكية من المحركات الرئيسية للنمو، مع تزايد اعتماد السيارات ذاتية القيادة وأجهزة إنترنت الأشياء .
2. وحدات IMU للضباب (وحدات IMU لجيروسكوب الألياف الضوئية)
توفر وحدات FOG IMU دقة عالية وانجرافًا منخفضًا ، مما يجعلها مثالية لأنظمة الطيران والدفاع والملاحة في البيئات التي تتطلب استقرارًا ودقة على المدى الطويل. تستخدم أجهزة الضباب تقنية الألياف الضوئية لقياس السرعة الزاوية وهي معروفة بمتانتها في الظروف القاسية.
| مميزة | الضباب IMU |
|---|---|
| مقاس | أكبر وأكثر قوة من وحدات MEMS IMU، المصممة للتطبيقات عالية الدقة. |
| يكلف | **تكلفة أعلى**، مما يجعلها مناسبة للتطبيقات المتخصصة في قطاعات **الطيران** و**العسكرية**. |
| دقة | **دقة عالية** مع الحد الأدنى من الانجراف، مثالية **للاستقرار على المدى الطويل** في **الفضاء**، و**الدفاع**، و**أنظمة الملاحة**. |
| التطبيقات | يُستخدم في **الفضاء**، و**الدفاع العسكري**، و**أنظمة الملاحة المتطورة**، و**أنظمة التوجيه الدقيقة**. |
| نمو السوق | نمو مطرد في قطاعات **الطيران**، و**العسكرية**، و**الملاحة عالية الدقة**، ولكنه محدود بسبب التكلفة العالية. |
توقعات السوق لوحدات IMU للضباب:
من المتوقع أن ينمو سوق FOG IMU بشكل مطرد في مجالات الطيران والدفاع العسكري وتطبيقات الملاحة عالية الدقة . إن الطلب المتزايد على المركبات ذاتية القيادة واستكشاف الفضاء وأنظمة توجيه الصواريخ سيدفع إلى اعتماد وحدات FOG IMUs. ومع ذلك، تظل تكلفتها العالية واستهلاك الطاقة من العوامل التي تحد من اختراق السوق على نطاق أوسع، لا سيما في التطبيقات الاستهلاكية منخفضة التكلفة.
3. RLG IMUs (IMUs جيروسكوب الليزر الحلقي)
تشبه وحدات RLG IMUs FOG IMU ولكنها تستخدم جيروسكوبات الليزر الحلقية لقياس السرعة الزاوية. تُعرف وحدات RLG IMU بالدقة والاستقرار العاليين للغاية ، وغالبًا ما تُستخدم في القطاعات العسكرية والفضاءية وغيرها من القطاعات عالية الأداء.
| مميزة | RLG IMU |
|---|---|
| مقاس | على غرار **وحدات IMU للضباب**، **أكبر** وأكثر قوة، مصممة **للتطبيقات عالية الدقة** في البيئات القاسية. |
| يكلف | **تكلفة عالية جدًا**، وهي مخصصة عمومًا للأنظمة المتميزة والمهمات الحرجة في الصناعات **الفضائية** و**العسكرية**. |
| دقة | **دقة عالية للغاية** مع الحد الأدنى من الانحراف، وغالبًا ما تُستخدم في أنظمة **ملاحة المركبات الفضائية** و**توجيه الصواريخ العسكرية**. |
| التطبيقات | يُستخدم في **الجيش** و**المركبات الفضائية** و**الملاحة عبر الأقمار الصناعية** و**أنظمة الدفاع عالية الدقة** الأخرى. |
| نمو السوق | على الرغم من كونها متخصصة، إلا أن **وحدات RLG IMU** لا تزال تلعب دورًا حاسمًا في **الدفاع عالي الأداء** و**الفضاء** و**أنظمة الفضاء**. السوق مستقر مع نمو متواضع بسبب ارتفاع التكاليف. |
توقعات السوق لوحدات RLG IMU:
في حين أن RLG IMU محدود بسبب تكلفته العالية، إلا أنه يظل ضروريًا لتطبيقات الدفاع العسكري والفضاء ، خاصة لتوجيه الصواريخ وأنظمة توجيه الأقمار الصناعية . ستستمر وحدات RLG IMU في لعب دور حاسم في هذه القطاعات ولكنها قد تواجه منافسة من وحدات FOG IMUs والتقنيات الناشئة.
الاتجاهات المستقبلية وتطوير وحدة قياس القصور الذاتي
يتميز مستقبل IMUs بالعديد من التطورات الرئيسية المدفوعة بالتقدم في تكنولوجيا الاستشعار وخوارزميات معالجة البيانات والطلب المتزايد على الأنظمة الدقيقة عبر مختلف الصناعات. فيما يلي بعض الاتجاهات الرئيسية:
1. التصغير والتكامل مع أجهزة الاستشعار الأخرى
مع ارتفاع الطلب على الأنظمة المدمجة والفعالة ، هناك اتجاه متزايد نحو تصغير وحدات IMU . وحدات IMUs للأنظمة الكهروميكانيكية الدقيقة في التطور، لتصبح أصغر حجمًا وأكثر فعالية من حيث التكلفة وأكثر قوة. بالإضافة إلى ذلك، دمج أجهزة الاستشعار مجالًا رئيسيًا للتطوير، حيث يتم دمج وحدات IMU مع أجهزة استشعار أخرى، مثل أجهزة قياس المغناطيسية العالمي (GPS ) وأجهزة قياس الضغط الجوي ، لتحسين الأداء والدقة.
2. دقة عالية بتكلفة أقل
التطورات الأخيرة في MEMS IMU تقود الاتجاه نحو تحقيق دقة عالية بتكلفة أقل . يمكن الآن لنماذج مثل GUIDE900 و GUIDE900A 0.1 درجة/ساعة و 0.05 درجة/ساعة ، مما يؤدي إلى سد الفجوة مع وحدات FOG IMU . وهذا يعني أنه سيتم استخدام وحدات MEMS IMU تطبيقات دقة الفضائية والعسكرية ، والتي كانت تهيمن عليها تقليديًا وحدات FOG IMU .
3. التكامل في الأنظمة الذاتية
وتشكل وحدات IMU جزءاً لا يتجزأ من تطوير المركبات المستقلة ، والطائرات بدون طيار ، والروبوتات . الاهتمام المتزايد بالملاحة المستقلة والتحكم الدقيق في الحركة إلى زيادة الطلب على وحدات IMU المتقدمة. إن تكامل وحدات IMU مع خوارزميات الذكاء الاصطناعي والتعلم الآلي يمكّن الأنظمة من التكيف بشكل أكثر فعالية مع بيئات العالم الحقيقي.
4. استخدام الذكاء الاصطناعي واندماج أجهزة الاستشعار
ستلعب خوارزميات الذكاء الاصطناعي معالجة بيانات IMU . ومن خلال الجمع بين بيانات IMU ومدخلات أجهزة الاستشعار الأخرى واستخدام التعلم الآلي ، ستتمكن الأنظمة الذاتية من إجراء تنبؤات وتعديلات أكثر دقة. أن الجمع بين وحدات IMU وتقنيات مثل أنظمة الرؤية و LiDAR والرادار إلى دفع حدود الملاحة والاستقرار في الوقت الفعلي.
5. تحسين المتانة والمرونة البيئية
ومن المتوقع أن تصبح وحدات IMU أكثر قوة ومرونة مواجهة الظروف القاسية مثل درجات الحرارة القصوى والاهتزازات والتداخل الكهرومغناطيسي. FOG IMUs و MEMS IMUs لتلبية الطلب المتزايد في مجالات الطيران والدفاع والتطبيقات الصناعية .
