FOG مقابل MEMS في الملاحة تحت الماء: أيهما أكثر ثباتًا؟ (الجزء الأول)
تحافظ جيروسكوبات FOG على انجراف منخفض للغاية واستقرار طويل الأمد في ظل ظروف بحرية محرومة من نظام GNSS، بينما توفر وحدات IMUs MEMS بدائل مدمجة ومنخفضة الطاقة ومناسبة بشكل أفضل لعمليات التفتيش قصيرة المدة والمنصات الحساسة للتكلفة.
FOG مقابل RLG: تقييم الدقة والموثوقية وتكاليف دورة الحياة
تُعدّ كلٌّ من FOG وRLG تقنيتي جيروسكوب راسختين في مجال الملاحة الدفاعية. ولكن عند مقارنة المشترين لهما من منظور المشتريات، تُوفّر FOG التوازن الأمثل بين الأداء والموثوقية وتكلفة دورة الحياة لجميع المهام تقريبًا باستثناء الردع الاستراتيجي.
كيفية اختيار FOG الذي يتكامل معك ويؤدي مهامك ويدعمك
قد يؤدي اختيار جيروسكوب الألياف الضوئية (FOG) الخاطئ إلى تأخير المشاريع وزيادة التكاليف. لذا، يتطلع المشترون الأذكياء إلى ما هو أبعد من مجرد مواصفات الجهاز، فيختارون جيروسكوبًا للألياف الضوئية (FOG) يتميز بسلاسة التكامل والأداء المتواصل، مع ضمان خدمة وتسليم طويل الأمد.
الحساسية الحرارية في جيروسكوبات الألياف الضوئية: استراتيجيات التصميم للبيئات القاسية
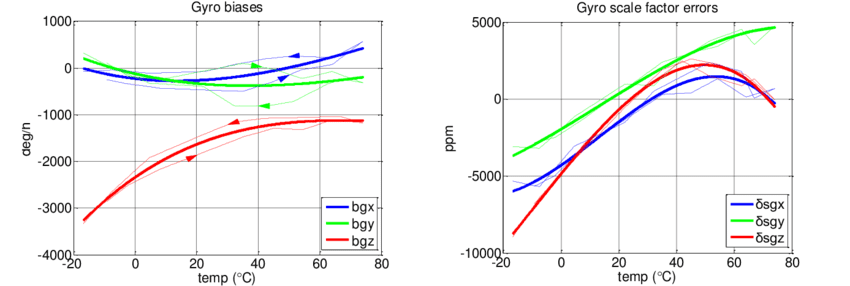
تنشأ الحساسية الحرارية في جيروسكوبات الألياف الضوئية من تمدد المادة، وتغيرات معامل الانكسار، وسلوك المصدر الضوئي. تُمكّن الاستراتيجيات المتقدمة - مثل التعويض الحراري، وتحسين لفّ الملفات، والمعايرة الدقيقة - جيروسكوبات الألياف الضوئية من الحفاظ على دقتها في البيئات القاسية.
التصميم مع وضع ARW في الاعتبار: الهندسة العملية لاختيار IMU (الجزء 2)
يُحدد نظام الحركة العشوائية الزاوية (ARW) الحد الأقصى لدقة وحدة القياس بالقصور الذاتي (IMU). لا يُمكن إزالته برمجيًا، بل يُمكن تقليله فقط من خلال اختيار مستشعر منخفض الضوضاء، وتصميم حراري مستقر، وعزل الاهتزاز، واستراتيجيات دمج متعددة المستشعرات فعّالة.
فهم ARW: الحد الخفي لدقة IMU (الجزء 1)
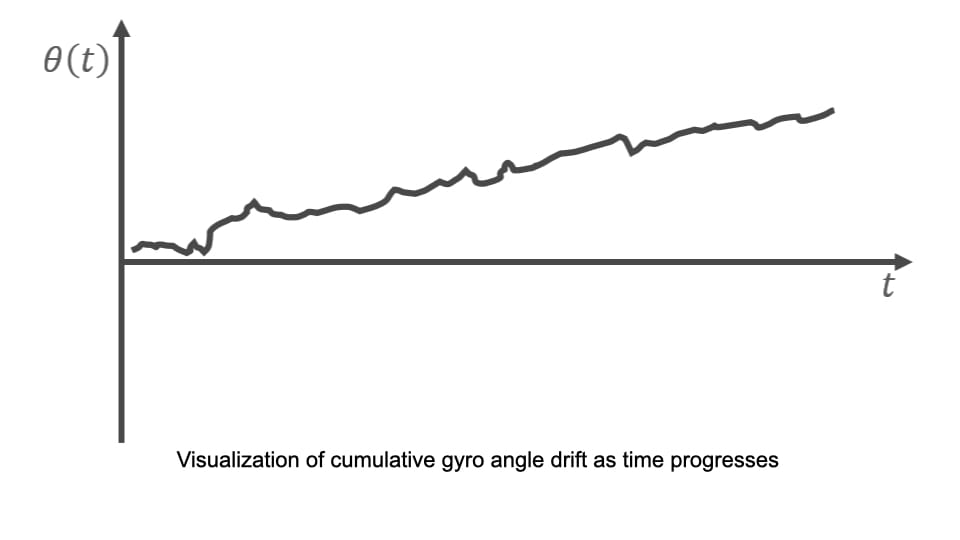
ARW ليس مواصفة، بل ساعة. منذ لحظة بدء تشغيل وحدة قياس القصور الذاتي (IMU)، يُخبرك بمدى سرعة تدهور ثقة التوجيه. كلما انخفضت، طالت مدة بقاء نظامك على المسار الصحيح.
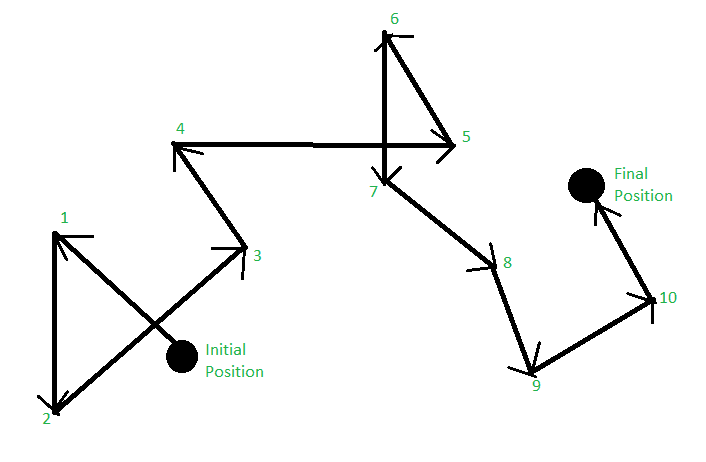
10 أخطاء تصميمية يرتكبها المهندسون عند دمج وحدات القياس بالقصور الذاتي (IMUs)
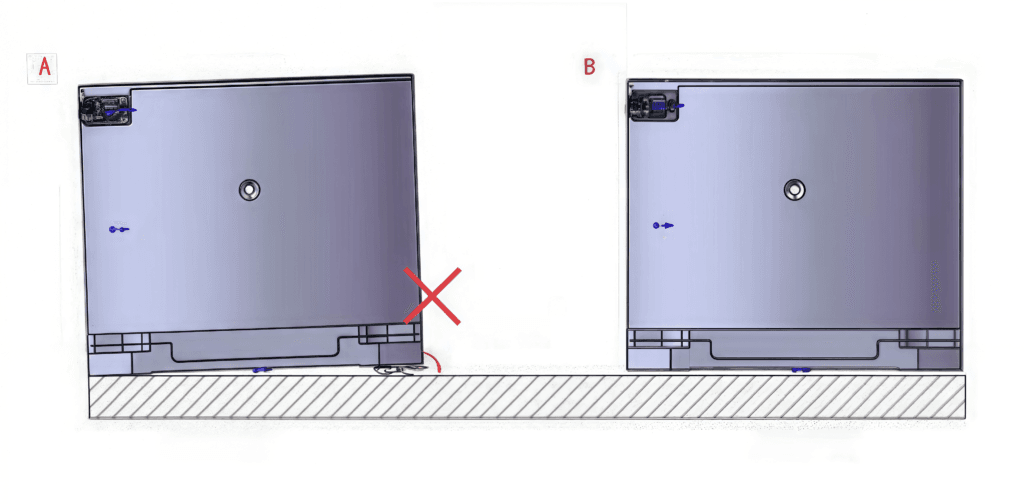
يمكن لأخطاء دمج وحدات القياس بالقصور الذاتي (IMU) أن تُضعف موثوقية الملاحة. بدءًا من سوء المحاذاة والاهتزاز، وصولًا إلى ضعف المعايرة والاعتماد المفرط على دمج المستشعرات، غالبًا ما يكرر المهندسون الأخطاء نفسها. في هذا الدليل، نستكشف الأخطاء العشرة الأكثر شيوعًا في دمج وحدات القياس بالقصور الذاتي (IMU)، ونشرح عواقبها، ونقدم حلولًا احترافية يُمكنك تطبيقها في مشاريعك الخاصة.
تقنية الضباب في التحكم في اتجاه المركبة الفضائية: ما وراء حدود الأنظمة الكهروميكانيكية الصغرى
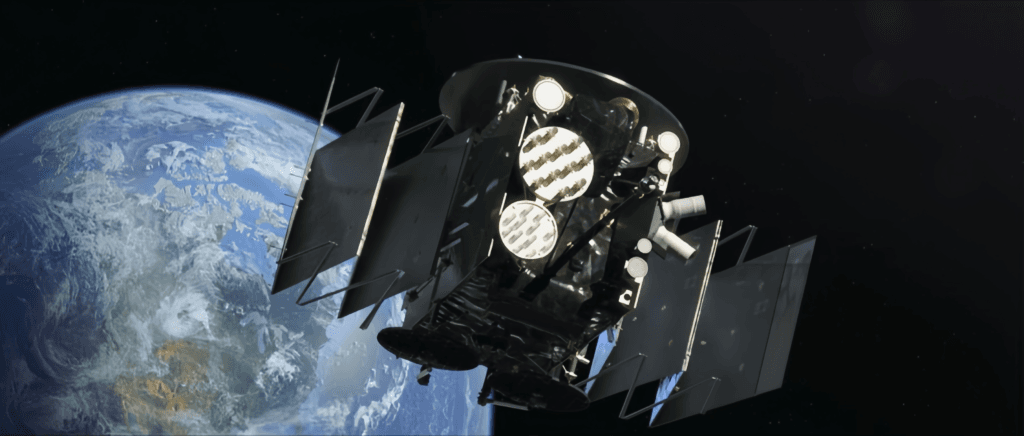
تتفوق جيروسكوبات الألياف الضوئية على أنظمة MEMS من خلال توفير استقرار طويل الأمد، ومقاومة للإشعاع، ودقة موثوقة لسنوات. وهي ضرورية للأقمار الصناعية، والأبراج، ومسبارات الفضاء العميق حيث لا يمكن المساس بالدقة.
كيف يُعيد دمج أجهزة الاستشعار المتعددة تعريف أنظمة الملاحة بالقصور الذاتي

دقة الملاحة بالقصور الذاتي محدودة في نهاية المطاف بمدى جودة نمذجة أخطاء المستشعر وتعويضها. من انحراف التحيز إلى المشي العشوائي، يتطلب التخفيف الفعال مزيجًا من تصميم الأجهزة، وإجراءات المعايرة، والتصحيح الخوارزمي الفوري.
أفضل 10 موردي وحدات القياس بالقصور الذاتي (IMU) من FOG في عام 2025

اكتشف أفضل 10 موردي وحدات IMU للألياف البصرية لعام 2025، بما في ذلك هانيويل، وإكسيل، وجايد ناف، وغيرها. قارن بين انحراف التحيز، ومراقبة الصادرات، والأداء التكتيكي لتطبيقات الطيران والدفاع.