الملاحة تحت الماء صعبة للغاية. فبدون إشارات نظام تحديد المواقع العالمي (GPS)، تعتمد المركبات تحت الماء كليًا على أجهزة استشعار بالقصور الذاتي لتتبع مواقعها. ويمكن أن يتراكم أي انحراف طفيف في الدقيقة ليُسبب كيلومترات من الخطأ على مدار المهام الطويلة. وبالنسبة للمشغلين الذين يرسمون خرائط خطوط الأنابيب أو يستكشفون المياه العميقة، قد تؤدي هذه الانحرافات إلى ضياع المهام وزيادة التكاليف وتعريض السلامة للخطر. ولذلك، يُعد الاختيار بين جيروسكوبات الألياف الضوئية (FOG) ووحدات قياس القصور الذاتي (IMUs) من الأنظمة الكهروميكانيكية الصغرى (MEMS) أمرًا بالغ الأهمية.
تحافظ جيروسكوبات FOG على انجراف منخفض للغاية واستقرار طويل الأمد في ظل ظروف بحرية محرومة من نظام GNSS، بينما توفر وحدات IMUs MEMS بدائل مدمجة ومنخفضة الطاقة ومناسبة بشكل أفضل لعمليات التفتيش قصيرة المدة والمنصات الحساسة للتكلفة.
لا يدور الجدل بين أنظمة FOG وMEMS حول أيهما أحدث، بل حول أيهما يتحمل حقًا ظروف الملاحة تحت الماء القاسية. بمقارنة أداء كل منهما من حيث الدقة، والمرونة البيئية، وتحمل الاهتزازات، ومعامل كفاءة الطاقة (SWaP)، وعوامل دورة الحياة، يمكننا تحديد مواطن تفوق كل تقنية ومواطن قصورها. يساعد هذا المنظور المنظم المشغلين على اختيار المستشعر المناسب للمهمة تحت الماء المناسبة.
جدول المحتويات
الدقة والانحراف خلال المهام الطويلة الأمد: أي مستشعر يعمل بشكل أفضل؟
أداء FOG
تستغل مستشعرات الضباب والضباب (FOG) تأثير سانياك لقياس السرعة الزاوية، بغض النظر عن الأجزاء الميكانيكية. يوفر هذا التصميم معدلات انجراف منخفضة للغاية ، غالبًا أقل من 0.05 درجة/ساعة، مما يجعلها مستقرة للغاية للمهام التي تستغرق من 6 إلى 10 ساعات أو أكثر. في رسم الخرائط تحت سطح البحر أو فحص خطوط الأنابيب، تحافظ المركبات ذاتية القيادة تحت الماء (AUVs) المجهزة بـ FOG على تقديرات دقيقة للاتجاهات دون الحاجة إلى تحديثات خارجية مستمرة، مما يضمن دقة المسح وكفاءة المهام.
أداء MEMS
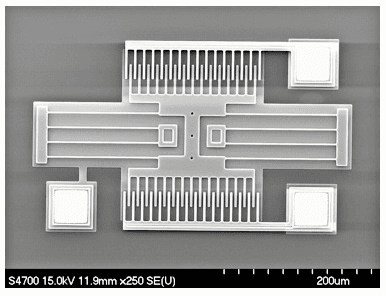
تقيس جيروسكوبات الأنظمة الكهروميكانيكية الصغرى (MEMS) الدوران من خلال هياكل اهتزازية. ورغم التحسينات، لا يزال عدم استقرار انحيازها يتراوح بين 1 و10 درجات/ساعة ، مما يؤدي إلى أخطاء تراكمية كبيرة في البيئات التي لا تدعم نظام الملاحة العالمي عبر الأقمار الصناعية (GNSS). تستطيع وحدات الأنظمة الكهروميكانيكية الصغرى (MEMS) تنفيذ غوصات قصيرة أو مهام تفتيش تستغرق أقل من ساعة، ولكن على مدى فترات طويلة، يتطلب تراكم الانجراف تصحيحًا متكررًا عبر أجهزة قياس المسافة (DVLs) وأجهزة قياس المسافة عبر الطوربيدات (USBLs) أو المنارات الصوتية. يحد هذا الاعتماد من استقلالية العمليات في أعماق البحار.
مقارنة
FOG : استقرار لا مثيل له، مناسب للمسوحات طويلة الأمد.
MEMS : مناسب فقط للمهام قصيرة المدى والمحدودة بالوقت.
الحكم : FOG هو الخيار الأفضل عندما تكون الدقة بمرور الوقت أمرًا بالغ الأهمية.
المتانة البيئية: ما هي التكنولوجيا التي تتحمل الضغوط ودرجات الحرارة القصوى تحت سطح البحر؟
متانة الضباب
تستخدم أجهزة FOG ملفات بصرية وإلكترونيات الحالة الصلبة، مما يجعلها مقاومة بطبيعتها للضغط والملوحة والتغيرات الحرارية الواسعة . ونظرًا لعدم وجود هياكل اهتزازية، فإن الضغط في العمق يكون له تأثير ضئيل على الأداء. ويمكن التنبؤ بتغيرات درجة الحرارة، ويمكن تعويضها من المصنع، مما يضمن دقة ثابتة في تحديد الاتجاه حتى في مياه القطب الشمالي أو المناطق الاستوائية.
متانة الأنظمة الكهروميكانيكية الصغرى
تُبنى مستشعرات الأنظمة الكهروميكانيكية الصغرى (MEMS) على هياكل دقيقة من السيليكون، حساسة للتمدد الحراري والإجهاد وتقلبات الضغط . قد تُؤثر الظروف تحت سطح البحر، وخاصةً التغيرات السريعة في درجات الحرارة أو الملوحة العالية، سلبًا على استقرار انحيازها وخطية عامل المقياس. تُساعد خوارزميات التعويض والتغليف، إلا أن الأنظمة الكهروميكانيكية الصغرى تتطلب عادةً إعادة معايرة نشطة عند تغير الظروف البيئية.
مقارنة
FOG : أكثر قوة في حالة التعرض الطويل الأمد للبيئات تحت سطح البحر.
الأنظمة الكهروميكانيكية الصغرى : حساسة للإجهاد البيئي، وتتطلب تصحيحًا متكررًا.
الحكم : يظل نظام FOG الخيار الموثوق به لمهام أعماق البحار، في حين أن أنظمة MEMS تناسب البيئات الضحلة أو الخاضعة للرقابة.

الاهتزاز والصدمة: أي مستشعر يحافظ على الاستقرار تحت الأحمال الديناميكية؟
استقرار الضباب
جيروسكوبات FOG، الخالية من الأجزاء الميكانيكية المتحركة، أقل حساسيةً للأخطاء الناتجة عن الاهتزازات. في المنصات البحرية، مثل المركبات ذاتية القيادة تحت الماء (AUVs) العاملة بالقرب من تيارات قاع البحر أو المركبات التي تعمل عن بُعد (ROVs) التي تتعامل مع الأدوات، تحافظ جيروسكوبات FOG على ثبات أدائها حتى في ظل الاهتزازات الدقيقة المستمرة أو الصدمات المفاجئة. يضمن تصميمها البصري تأثيرًا ضئيلًا للأحمال الديناميكية على عاملي الانحراف والمقياس، ولذلك تُعتبر جيروسكوبات FOG موثوقة في أنظمة مكافحة الألغام البحرية وأعمال البناء البحرية.
استقرار الأنظمة الكهروميكانيكية الصغرى
على الرغم من بنيتها الدقيقة المتينة، تُعدّ مستشعرات MEMS أكثر عرضة للاهتزازات والضوضاء والصدمات . يمكن للهياكل المهتزة التقاط ترددات غير مرغوب فيها، مما يُسبب قراءات خاطئة لمعدلات الزاوية أو عدم استقرار مؤقت في المخرجات. في حين تُحسّن تقنيات التخميد والترشيح الأداء، غالبًا ما تتطلب جيروسكوبات MEMS معالجة مكثفة للإشارات لتظل صالحة للاستخدام في بيئات عالية الاهتزاز، مثل الطائرات المسيرة التي تعمل بمحركات الدفع تحت الماء.
مقارنة
- FOG : يوفر قراءات مستقرة في ظل الاهتزاز والصدمة المفاجئة، مما يقلل من انتشار الخطأ.
- MEMS : خفيفة الوزن ولكنها عرضة للضوضاء الناجمة عن الاهتزاز، وتتطلب تصفية ثقيلة.
- الحكم : بالنسبة للمنصات المعرضة للاضطرابات أو الاهتزازات الناجمة عن المروحة أو عمليات الأدوات تحت سطح البحر، فإن FOG توفر بوضوح الحل الأكثر استقرارًا وحماية من المهام.
الحجم والوزن والقوة: أي مستشعر يناسب المنصات المقيدة بـ SWaP؟
خصائص FOG SWaP
عادةً ما تأتي مستشعرات الضباب (FOG) مزودةً بملفات بصرية أكبر ومتطلبات طاقة أعلى . حتى مع التصغير الحديث، يمكن أن يزن مستشعر الضباب (FOG) التكتيكي مئات الغرامات ويستهلك طاقةً هائلة. في المركبات ذاتية القيادة (AUV) الصغيرة أو المركبات التي تعمل بالبطاريات المحدودة، قد يقلل هذا من قدرتها على التحمل أو سعة حمولتها. ومع ذلك، بالنسبة للمركبات البحرية متوسطة وكبيرة الحجم، غالبًا ما تُبرر الدقة والثبات الفائقان الفارق بين الحجم والقوة.
خصائص SWaP MEMS
تتميز وحدات القياس الدقيقة (IMUs) الكهروميكانيكية الصغرى (MEMS) بصغر حجمها وخفتها وكفاءتها في استهلاك الطاقة . يزن العديد من وحدات MEMS التكتيكية أقل من 50 جرامًا وتعمل بطاقة أقل من واط واحد. هذا يجعلها مثالية لطائرات التفتيش الصغيرة بدون طيار، ووحدات الملاحة المحمولة للغواصين، أو الحمولات حيث يكون لكل جرام ومللي أمبير قيمة. يسمح حجمها الصغير بالدمج في هياكل ضيقة، مما يتيح تصميم مركبات مرنة.
مقارنة
- FOG : أكبر حجمًا ويستهلك قدرًا كبيرًا من الطاقة، وهو الأفضل للمنصات التي تحتوي على مساحة كافية وميزانيات طاقة.
- MEMS : تم تحسينها للأنظمة المقيدة بـ SWaP، مما يتيح تصميمات خفيفة الوزن ومنخفضة الطاقة.
- الحكم : عندما تكون الكفاءة والاكتناز من أهم الأولويات، فإن MEMS هو الخيار الطبيعي؛ بالنسبة للمهام التي تعطي الأولوية للدقة على التحمل، يظل FOG هو المعيار.

التكامل مع المساعدات تحت سطح البحر: أي مستشعر يعمل بشكل أفضل مع DVL و USBL؟
تكامل FOG
توفر جيروسكوبات FOG مرجعًا عالي الاستقرار يُحسّن بشكل كبير أداء أنظمة تسجيل سرعة دوبلر (DVLs)، وخط الأساس فائق القصر (USBL)، وخط الأساس الطويل (LBL). ونظرًا لدقة مخرجات FOG مع مرور الوقت، يُمكن لأجهزة الاستشعار المساعدة تحديثها بوتيرة أقل، مما يُقلل من أخطاء الملاحة حتى في حالة تقطع الإشارات الصوتية أو حجبها جزئيًا. هذا التآزر يجعل حلول INS القائمة على FOG المعيارَ المُعتمد للمركبات ذاتية القيادة ذاتية القيادة (AUV) من فئة المسح، والمهام البحرية طويلة المدى.
تكامل MEMS
تعتمد وحدات قياس القصور الذاتي (IMUs) من MEMS بشكل أكبر على المساعدات الخارجية نظرًا لارتفاع معدل انجرافها وعدم استقرار انحيازها . ورغم سهولة دمجها مع DVLs وUSBLs بفضل تصميمها خفيف الوزن والسهل الاستخدام رقميًا، إلا أن الحاجة المتكررة للتصحيحات تزيد من اعتماد النظام على التحديثات الصوتية. في البيئات الصاخبة أو ذات الإشارة المتدهورة، قد تُظهر الملاحة القائمة على MEMS قفزات أو انخفاضًا في جودة تحديد المواقع ما لم تُعزز بخوارزميات دمج مستشعرات متقدمة.
مقارنة
- FOG : يوفر العمود الفقري المستقر لأنظمة المساعدة تحت سطح البحر، مما يقلل الاعتماد على التصحيحات المتكررة.
- MEMS : من السهل دمجها ولكنها تتطلب تحديثات خارجية مستمرة للتعويض عن الانحراف.
- الحكم : بالنسبة للمهام التي قد تكون فيها التحديثات الصوتية غير موثوقة، فإن FOG هو الرهان الأكثر أمانًا؛ يمكن أن تكون أنظمة MEMS كافية عندما تكون المساعدة الخارجية مضمونة ومتكررة.
من استقرار الانجراف إلى المرونة البيئية، وتحمل الاهتزاز، وSWaP، وتكامل النظام، فإن المقارنة حتى الآن توضح أن FOG يتفوق بشكل عام على MEMS في الظروف الصعبة تحت سطح البحر، بينما تظل MEMS خيارًا عمليًا للمهام الأخف والأقصر.
ومع ذلك، فإن الأداء وحده لا يُحدد الحل الأمثل. فالتكلفة، ومتطلبات الصيانة، وجودة البيانات، والتطبيقات المُجرّبة، عوامل حاسمة بنفس القدر عند اختيار مستشعر للمنصات البحرية. في الجزء الثاني، سنواصل هذا الاستكشاف من خلال دراسة اقتصاديات دورة الحياة، والصيانة، وموثوقية رسم الخرائط، وحالات الاستخدام الواقعية، قبل التوصل إلى قرار نهائي بشأن أي التقنيات أكثر صمودًا تحت الماء.
