جدول المحتويات
- ما هي IMU؟
- ما هي المكونات الأساسية لIMU؟
- ما هي التطبيقات الشائعة لـ IMU؟
- لماذا تعتبر IMU مهمة في أنظمة الملاحة وتحديد المواقع.
- MEMS IMU : نظرة عامة على MEMS IMU وتطبيقاتها.
- FOG IMU : جيروسكوب الألياف الضوئية IMU – حالات الاستخدام في التطبيقات عالية الدقة
- جيروسكوبات MEMS وFOG – مقارنة مختصرة
- عدم الاستقرار التحيز
- التحيز الأولي
- النطاق والقرار
- عامل القياس وخطأ القياس
- الضوضاء وكثافة الضوضاء
- عرض النطاق الترددي ومعدل العينة
- المشي العشوائي
- العوامل التي يجب مراعاتها (مواصفات الأداء، البيئة، الحجم، التكلفة).
- فهم متطلبات التطبيق الخاص بك (على سبيل المثال، الصناعية، والالكترونيات الاستهلاكية، والسيارات).
- الأخطاء الشائعة التي يجب تجنبها عند اختيار IMU.
مقدمة
وحدات القياس بالقصور الذاتي (IMUs) هي العمود الفقري لأنظمة الملاحة الحديثة. سواء في الطائرات أو الصواريخ أو السيارات ذاتية القيادة أو حتى هاتفك الذكي، تلعب هذه المستشعرات دورًا محوريًا في قياس الحركة والاتجاه دون الحاجة إلى مراجع خارجية مثل نظام تحديد المواقع العالمي (GPS). على مدى العقدين الماضيين، أدى تطوير تكنولوجيا الأنظمة الكهروميكانيكية الدقيقة إلى تقليل حجمها وتكلفتها بشكل كبير، مما يجعلها لا غنى عنها في مجموعة واسعة من الصناعات.
في هذا الدليل الشامل، سوف أطلعك على أساسيات وحدات IMU، بما في ذلك كيفية عملها، والأنواع المختلفة من أجهزة الاستشعار التي تستخدمها، وسبب أهمية مقاييس أدائها. من أحدث ابتكارات الطيران إلى الإلكترونيات الاستهلاكية، يعد فهم ما هو IMU وكيفية عمل IMU أمرًا بالغ الأهمية لأي شخص مشارك في تصميم أنظمة التكنولوجيا الفائقة أو تحسينها. بحلول نهاية هذه المقالة، ستكون مجهزًا جيدًا بالمعرفة اللازمة لاختيار وحدة IMU المناسبة لمشروعك، مما يضمن قدرتك على تلبية المتطلبات الأكثر تطلبًا.
ما هي وحدة القياس بالقصور الذاتي (IMU)/ما هي IMU؟
وحدة القياس بالقصور الذاتي (IMU) هي نظام استشعار يقيس التسارع والسرعة الزاوية والمجالات المغناطيسية غالبًا لتحديد اتجاه الجسم وحركته في الفضاء. وهي تتضمن عادةً مقاييس التسارع، والجيروسكوبات، وأحيانًا مقاييس المغناطيسية. تعمل هذه المكونات معًا لتوفير بيانات مهمة للملاحة والاستقرار والتحكم في مجموعة واسعة من التطبيقات، بدءًا من الطيران والروبوتات وحتى الهواتف الذكية والمركبات ذاتية القيادة. تعد وحدات IMU ضرورية في الأنظمة التي تتطلب بيانات دقيقة للحركة والتوجيه.
دعونا نستكشف عالم IMUs بالتفصيل.
ما هي بيانات استشعار IMU؟
تتكون بيانات مستشعر IMU من إشارات من ثلاثة أجهزة استشعار أساسية:
- مقاييس التسارع : قياس التسارع الخطي على طول المحاور X وY وZ.
- الجيروسكوبات : قياس سرعة الدوران أو السرعة الزاوية حول نفس المحاور.
- أجهزة قياس المغناطيسية (اختياري): قم بقياس المجال المغناطيسي للمساعدة في تحديد الاتجاه في الفضاء، مما يوفر وظيفة تشبه البوصلة.
يوفر كل مستشعر من مستشعرات IMU هذه دفقًا من بيانات IMU التي، عند دمجها ومعالجتها، تعطي صورة كاملة لحركة الكائن واتجاهه. عادة، يتم استخدام هذه البيانات لاستخلاص مقاييس مهمة مثل:
- التسارع : التغير الخطي في السرعة.
- السرعة الزاوية : معدل الدوران حول محور .
- الاتجاه : الموضع الدوراني لجسم ما في الفضاء ثلاثي الأبعاد.
تلعب دقة ودقة بيانات مستشعر IMU دورًا محوريًا في الأنظمة التي تتطلب التتبع والتنقل في الوقت الفعلي. عند استخدامها في تطبيقات الفضاء أو الدفاع أو الصناعة، يمكن للبيانات توجيه مركبة فضائية أو طائرة أو نظام آلي بدقة متناهية.
ما هي المكونات الأساسية لIMU؟ /ما هو مستشعر IMU؟
عندما نتحدث عن وحدة القياس بالقصور الذاتي (IMU) ، فإننا نشير في الواقع إلى مجموعة من أجهزة الاستشعار الأساسية المتعددة، كل منها يخدم وظيفة حاسمة في قياس الحركة والاتجاه. تشتمل مستشعرات IMU الأساسية على مقاييس التسارع ، والجيروسكوبات ، وفي كثير من الحالات، مقاييس المغناطيسية . تعمل هذه المستشعرات معًا لتمنحنا فهمًا شاملاً لحركة الجسم في الفضاء. دعونا نحلل كيف يساهم كل من هذه المستشعرات في وظائف IMU الشاملة.
الوظيفة الأساسية لـ IMU واضحة ومباشرة: فهي تقيس مدى سرعة تحرك الجسم (التسارع الخطي) وكيفية دورانه (السرعة الزاوية). ثم يتم استخدام هذه البيانات لحساب الموقع والسرعة والاتجاه مع مرور الوقت. فكر في الأمر على أنه "الإحساس بالتوازن" الداخلي للآلات. سواء كان الأمر يتعلق بتوجيه طائرة بدون طيار في الهواء، أو مساعدة سيارة ذاتية القيادة على التنقل، أو تثبيت شاشة الهاتف الذكي، تضمن وحدة IMU أن تظل الأنظمة على علم بتحركاتها في جميع الأوقات.
مقياس التسارع IMU: ماذا يقيس مقياس التسارع؟
مقياس التسارع التسارع الخطي على طول محور واحد أو أكثر. بعبارات بسيطة، يخبرك بمدى سرعة تسارع شيء ما أو تباطؤه. وهذا ضروري لحساب السرعة والتغيرات في الموقع مع مرور الوقت. على سبيل المثال، في السيارة، يقيس مقياس التسارع القوى أثناء زيادة سرعة السيارة، أو تباطؤها، أو الانعطافات الحادة.
من خلال خبرتي، تعتبر مقاييس التسارع هي العمود الفقري لتتبع الحركة في معظم الأنظمة. سواء كنت تعمل مع الطائرات بدون طيار (المركبات الجوية بدون طيار)، أو الهواتف الذكية، أو المعدات الصناعية، توفر مقاييس التسارع البيانات الأساسية اللازمة لحساب الحركة.
جيروسكوب IMU: ماذا يقيس الجيروسكوب؟
جيروسكوب IMU السرعة الزاوية - وهي في الأساس مدى سرعة دوران الجسم حول محاوره . إذا سبق لك أن رأيت قمة تدور على طاولة، فإن هذا الدوران هو بالضبط ما يكتشفه الجيروسكوب. يساعدنا هذا المستشعر في تحديد اتجاه الجهاز، وهو أمر مفيد بشكل خاص في تثبيت الأنظمة أو تتبع الحركة الدورانية الدقيقة للكائن.
لقد رأيت الجيروسكوبات تلعب دورًا حيويًا في أنظمة الملاحة، خاصة في تطبيقات الفضاء الجوي. عندما تكون الدقة أمرًا أساسيًا، يضمن الجيروسكوب عالي الجودة تتبع الاتجاه بدقة، حتى عندما تدخل العوامل الخارجية - مثل الاضطراب - في الاعتبار.
مقياس المغناطيسية IMU: ماذا يقيس مقياس المغناطيسية؟
وأخيرًا، مقياس المغناطيسية المجال المغناطيسي حول الجهاز، والذي يُستخدم عادةً لتحديد الاتجاه أو الاتجاه بالنسبة للمجال المغناطيسي للأرض. فكر في الأمر كبوصلة إلكترونية. في حين أن الجيروسكوبات ومقاييس التسارع تساعد في تتبع الحركة، فإن مقياس المغناطيسية يعزز دقة التوجيه من خلال توفير معلومات الاتجاه المتعلقة بالشمال المغناطيسي.
لقد وجدت أن مقياس المغناطيسية مهم بشكل خاص في التطبيقات التي تكون فيها إشارات GPS ضعيفة أو غير متوفرة. على سبيل المثال، في البيئات الحضرية الكثيفة، تحت الأرض أو تحت الماء، يعد الحصول على إحساس دقيق بالاتجاه أمرًا بالغ الأهمية، ويضمن مقياس المغناطيسية أنك لن "تضيع" أبدًا.
ما هي التطبيقات الشائعة لـ IMU؟
لا تقتصر وحدات IMU على مجال واحد محدد فحسب، بل يتم استخدامها عبر مجموعة واسعة من الصناعات. يعد تعدد استخداماتها أحد الأسباب الرئيسية التي جعلتها جزءًا لا يتجزأ من التكنولوجيا الحديثة. ، رأيت وحدات IMU مستخدمة في كل شيء بدءًا من الطيران والسيارات وحتى الإلكترونيات الاستهلاكية والروبوتات والدفاع /الجيش . وإليك كيفية تأثيرها على كل قطاع:
الدفاع / العسكرية
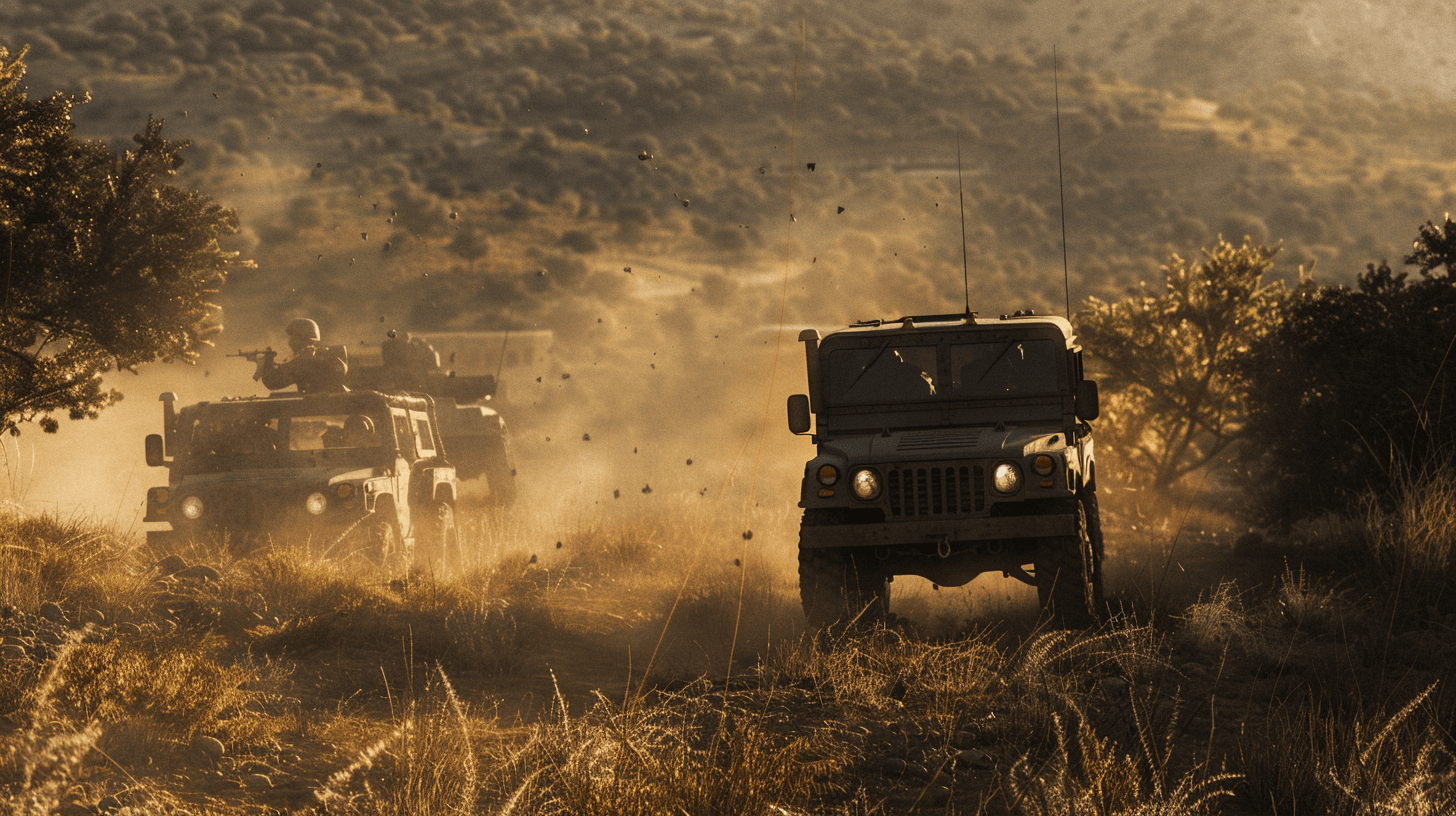
هذه صناعة تثبت فيها وحدات IMU قيمتها حقًا. في التطبيقات الدفاعية والعسكرية، فإن الحاجة إلى الملاحة الدقيقة والاستقرار أمر غير قابل للتفاوض. من أنظمة توجيه الصواريخ إلى المركبات الجوية بدون طيار (UAVs) وحتى الأجهزة التي يرتديها الجنود ، تلعب وحدات IMU دورًا أساسيًا في ضمان سير العمليات بدقة وفعالية.
لقد شاركت في العديد من المشاريع المتعلقة بالدفاع، ويمكنني أن أخبرك بشكل مباشر أن وحدات IMU مهمة جدًا في البيئات التي لا يكون فيها الفشل خيارًا. على سبيل المثال، في أنظمة الصواريخ، توفر IMU ردود فعل في الوقت الفعلي حول السرعة والدوران، مما يضمن إصابة الصاروخ لهدفه بدقة. في الطائرات بدون طيار، حيث يمكن أن تكون إشارات نظام تحديد المواقع العالمي (GPS) غير موثوقة أو مشوشة، توفر وحدات IMU الملاحة بالقصور الذاتي اللازمة لإبقاء المركبة في مسارها.
وحتى على مستوى الجنود، يتم تضمين وحدات IMU في الأجهزة التكتيكية لتتبع الحركة والموقع في غياب نظام تحديد المواقع العالمي (GPS)، مما يساعد على توفير الوعي الظرفي في التضاريس المعقدة مثل البيئات الحضرية الكثيفة أو تحت الأرض. تعد وحدات IMU عامل تمكين رئيسي لاعتماد الحرب الحديثة المتزايد على الأنظمة المستقلة وشبه المستقلة.
الفضاء الجوي

في مجال الفضاء الجوي، لا يمكن المبالغة في أهمية وحدات IMU. سواء في الطائرات أو المركبات الفضائية أو الطائرات بدون طيار، توفر وحدات IMU البيانات الهامة اللازمة للملاحة والتحكم والاستقرار. إنها في الأساس العمود الفقري لأنظمة الطيار الآلي، مما يضمن مسارات طيران سلسة وهبوطًا دقيقًا.
عندما عملت مع عملاء في مجال الطيران، فإنهم غالبًا ما يطلبون وحدات IMU عالية الأداء يمكنها العمل في البيئات القاسية، مثل الارتفاعات العالية أو حتى الفضاء الخارجي. تحافظ وحدة IMU على مسار الطائرة، وتتكيف مع الاضطرابات أو قص الرياح أو القوى الخارجية الأخرى. في استكشاف الفضاء، تعد وحدات IMU ضرورية للحفاظ على اتجاه الأقمار الصناعية والمركبات الجوالة، حيث لا يوجد نظام تحديد المواقع العالمي (GPS) يمكن الاعتماد عليه.
السيارات

مع ظهور المركبات ذاتية القيادة، أصبحت وحدات IMU ضرورية في صناعة السيارات. تعتمد السيارات ذاتية القيادة على وحدات IMU لفهم موقعها وحركتها دون تدخل بشري. تساعد وحدة IMU السيارة على اتخاذ قرارات حاسمة في الوقت الفعلي، سواء كانت تكتشف متى يجب إبطاء السرعة أو اتخاذ منعطف حاد بأمان.
في تطوير أنظمة مساعدة السائق المتقدمة (ADAS) ، تلعب وحدات IMU دورًا محوريًا من خلال تغذية البيانات إلى الأنظمة الموجودة على متن الطائرة. لقد رأيت وحدات IMU تستخدم في التحكم في الثبات، حيث تساعد في اكتشاف وتصحيح الانعطاف الزائد أو الناقص، وفي أنظمة المكابح الأوتوماتيكية، حيث يعد التباطؤ السريع أمرًا حيويًا لتجنب وقوع الحوادث.
الالكترونيات الاستهلاكية

في مجال الإلكترونيات الاستهلاكية، تتمتع وحدات IMU بحضور أكثر دقة ولكن بنفس القدر من الأهمية. فهي موجودة في هاتفك الذكي، مما يضمن دورانًا سلسًا للشاشة أو تشغيل الألعاب القائمة على الحركة. في أجهزة تتبع اللياقة البدنية والساعات الذكية، تقوم وحدات IMU بتتبع الحركة ومراقبة النشاط وحساب الخطوات أو السعرات الحرارية المحروقة.
في العديد من المشاريع التي تتضمن التكنولوجيا القابلة للارتداء، رأيت بنفسي مدى مساهمة IMU في تجربة المستخدم. تستخدم المستشعرات الموجودة داخل أجهزة اللياقة البدنية مقاييس التسارع والجيروسكوبات لالتقاط الحركات بدقة، سواء كانت المشي أو الجري أو حتى السباحة. وتضمن وحدات IMU أن تعمل هذه الأجهزة بسلاسة، مما يوفر للمستخدمين بيانات دقيقة يعتمدون عليها يوميًا.
الروبوتات
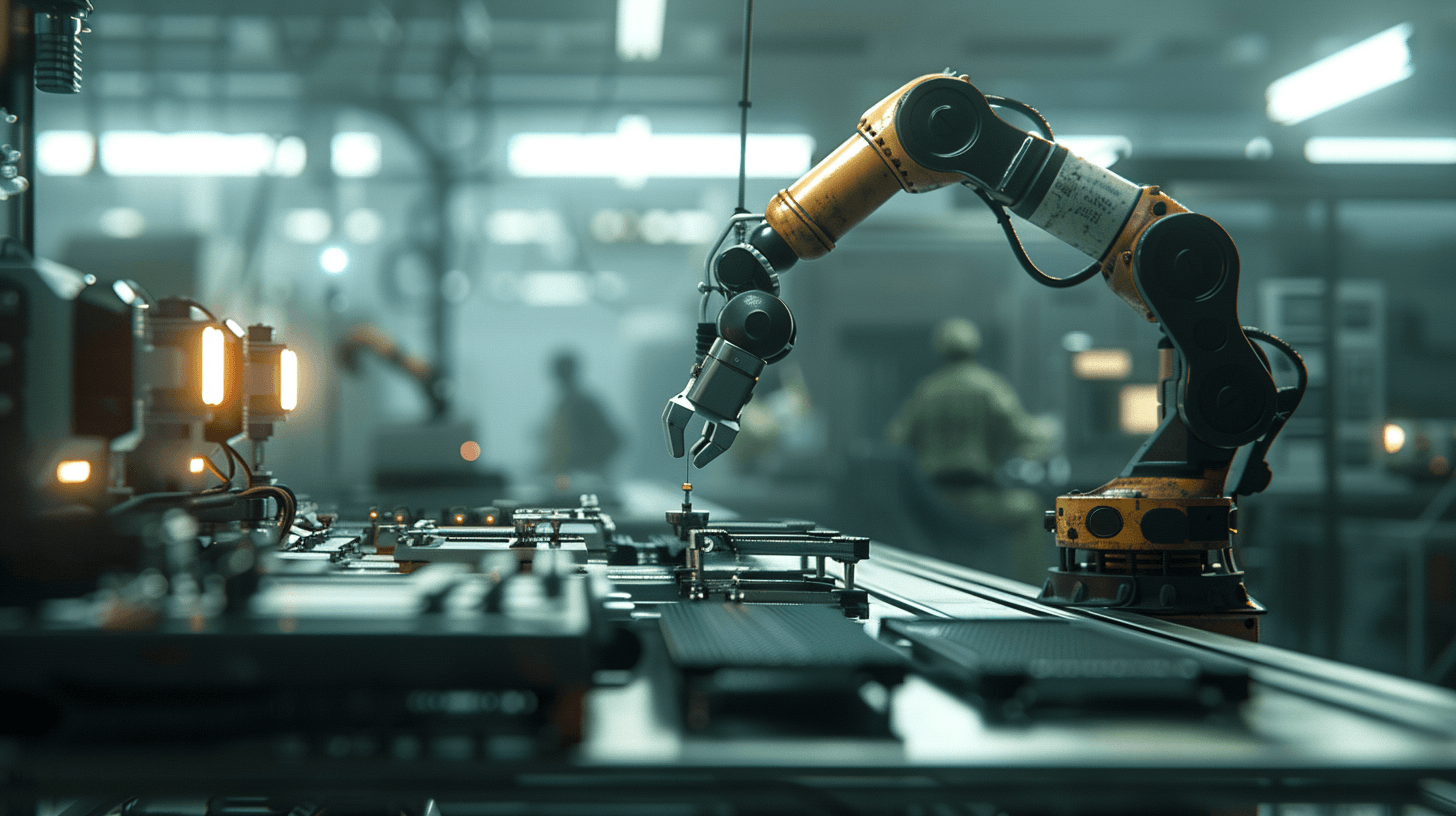
تعتمد الروبوتات، سواء الصناعية منها أو المستقلة، بشكل كبير على وحدات IMU للملاحة والتحكم الدقيقين. في البيئات الصناعية، تسمح وحدات IMU للروبوتات بالتحرك بدقة على خطوط التجميع، والتعامل مع الأجزاء الحساسة بأقصى قدر من الدقة. بالنسبة للروبوتات المستقلة، سواء كانت تتنقل في مستودع أو تستكشف مناطق الكوارث، تضمن وحدات IMU أنها تظل متوازنة وفي المسار الصحيح.
لقد عملت على العديد من الأنظمة الآلية المستقلة حيث كانت وحدات IMU أساسية لتحقيق التوازن والحركة. وبدون وحدات IMU، ستفتقر هذه الأنظمة إلى الدقة المطلوبة للمهام الحرجة مثل التنقل في التضاريس غير المستوية، مما يجعلها أقل فعالية وموثوقية بكثير.
لماذا تعتبر IMU مهمة في أنظمة الملاحة وتحديد المواقع?
في أي نظام يتطلب التنقل أو تحديد المواقع بدقة، تعد وحدة IMU أداة لا غنى عنها. على مر السنين، رأيت الدور الحاسم الذي تلعبه IMUs في إبقاء كل شيء من الطائرات بدون طيار إلى الغواصات على المسار الصحيح. ويكمن جوهر فائدته في قدرته على قياس الحركة دون الاعتماد على مراجع خارجية .
البيئات المرفوضة من نظام تحديد المواقع العالمي (GPS).
أحد أهم جوانب IMU هو قدرتها على العمل في البيئات المرفوضة لنظام تحديد المواقع العالمي (GPS) . سواء كنت تحت الماء أو تحت الأرض أو في منطقة حضرية كثيفة حيث لا يمكن الاعتماد على إشارات GPS، لا يزال بإمكان IMU تتبع الحركة بدقة لا تصدق. لقد رأيت أنظمة تستمر في العمل بسلاسة في هذه البيئات، وذلك بفضل IMU، الذي يقيس التغيرات في السرعة والاتجاه بشكل مستمر.
في مجال الطيران، وخاصة الطائرات بدون طيار أو الطائرات العسكرية بدون طيار، قد يكون الاعتماد على نظام تحديد المواقع (GPS) فقط محفوفًا بالمخاطر. توفر وحدات IMU طبقة إضافية من الموثوقية من خلال توفير التنقل بالقصور الذاتي عند فقدان إشارات GPS أو تشويشها. يعد هذا التكرار أمرًا بالغ الأهمية لكل من التطبيقات المدنية والدفاعية.
تحديد المواقع والاستقرار
يعد الاستقرار مجالًا آخر تتفوق فيه وحدات IMU. تتطلب العديد من الأنظمة، وخاصة في قطاعي الطيران والبحرية، تعديلات في الوقت الفعلي للحفاظ على الاستقرار. سواء كان الأمر يتعلق بالحفاظ على ثبات الطائرة بدون طيار أثناء الطيران أو ضمان بقاء الكاميرا ذات المحورين ثابتة أثناء التقاط اللقطات، فإن IMUs هي التكنولوجيا الموجودة خلف الكواليس مما يجعل كل ذلك ممكنًا.
لقد عملنا مع IMUs في العديد من الأنظمة حيث التصحيحات في الوقت الفعلي ضرورية. على سبيل المثال، في طائرات الهليكوبتر أو الطائرات، تقدم وحدات IMU باستمرار تعليقات إلى الطيار الآلي، مما يساعد في إجراء تعديلات دقيقة للتعويض عن هبوب الرياح أو الاضطرابات.
الدقة والاستقلالية
في الأنظمة ذاتية القيادة، مثل السيارات ذاتية القيادة أو الروبوتات، تعد الحاجة إلى التنقل الدقيق أمرًا بالغ الأهمية. تساعد وحدات IMU هذه الأنظمة على فهم اتجاهها وسرعتها ومسارها، حتى عندما تكون الظروف الخارجية صعبة. ومن خلال تغذية البيانات للتحكم في الخوارزميات، تسمح وحدة IMU لهذه الآلات "بمعرفة" مكانها بالضبط وإلى أين تتجه. هذا الوعي في الوقت الحقيقي هو ما يجعل الاستقلالية الحقيقية ممكنة.
في عملنا مع الأنظمة الذاتية، وخاصة الطائرات بدون طيار، رأينا كيف تساعد وحدات IMU في حساب الموقع بدقة مع مرور الوقت. إلى جانب تقنيات دمج أجهزة الاستشعار، تمكن وحدة IMU هذه الأنظمة من ضبط مساراتها وإبقائها في المسار الصحيح دون تدخل بشري.
كيف تبدو إيمو؟

وحدة القياس بالقصور الذاتي (IMU) هي عادةً جهاز مدمج يدمج عدة أجهزة استشعار لقياس تسارع الجسم، والسرعة الزاوية، وأحيانًا المجالات المغناطيسية. في حين أن المظهر المحدد لوحدة IMU يمكن أن يختلف اعتمادًا على الشركة المصنعة والطراز والاستخدام المقصود، إلا أن هناك بعض الخصائص العامة التي تشترك فيها معظم وحدات IMU.
فيما يلي تفاصيل لما تبدو عليه وحدة IMU عادةً:
1. الحجم والشكل
معظم وحدات القياس بالقصور الذاتي (IMU) صغيرة نسبيًا وغالبًا ما تكون مستطيلة أو مكعبة الشكل. يمكن أن تختلف الأبعاد اعتمادًا على الدقة والتطبيق، ولكن وحدة IMU العامة المستخدمة في الأجهزة الإلكترونية الاستهلاكية قد تكون بحجم عملة معدنية صغيرة أو كتاب ثقاب سميك. يمكن أن تكون وحدات IMU الصناعية أو الفضائية أكبر، وأحيانًا بحجم كمبيوتر محمول صغير أو محرك أقراص ثابتة، اعتمادًا على مدى تعقيد النظام.
2. السكن الخارجي
عادةً ما يتم وضع وحدات IMU في أغلفة متينة ومغلقة غالبًا لحماية المستشعرات الداخلية من العوامل البيئية مثل الرطوبة أو الغبار أو التأثيرات. تكون مادة الغلاف عادةً عبارة عن سبيكة معدنية أو بلاستيك عالي القوة، مما يضمن المتانة في الظروف القاسية (مثل الفضاء الجوي والتطبيقات العسكرية).
- وحدات IMU الصناعية والفضائية بغلاف معدني أكثر قوة لتحمل الظروف القاسية.
- وحدات IMU المخصصة للمستهلكين (المستخدمة في أجهزة مثل الهواتف الذكية أو الطائرات بدون طيار) إلى وضعها في حاويات بلاستيكية أخف وزنًا.
3. الموصلات والمنافذ
تشتمل وحدات IMU عمومًا على موصلات للطاقة وإخراج البيانات وأحيانًا واجهات الاتصال (على سبيل المثال، UART أو I2C أو SPI أو RS-232). تسمح هذه الموصلات لـ IMU بالتفاعل مع الأنظمة الأخرى، سواء كانت وحدة تحكم طيران لطائرة بدون طيار، أو روبوت، أو نظام ملاحة للطائرة.
- بالنسبة للأنظمة الأكثر تعقيدًا، منافذ متعددة للإشارات المختلفة مرئية.
- في بعض الحالات، وحدات IMU اللاسلكية ، مما يقلل الحاجة إلى الموصلات المرئية.
4. وضع المستشعر
عادةً ما تكون المكونات الداخلية لوحدة IMU - مقاييس التسارع والجيروسكوبات ومقاييس المغناطيسية - مدمجة داخل جسم الوحدة. إذا نظرت إلى وحدة IMU تحت المجهر أو في مخطط تفصيلي، فسترى شرائح استشعار صغيرة (MEMS أو أجهزة كهرضغطية) مدمجة داخل الجهاز.
أنواع أجهزة الاستشعار في IMU
عندما يتعلق الأمر بوحدات القياس بالقصور الذاتي (IMUs)، فإن أجهزة الاستشعار الموجودة بداخلها هي التي تدفع الأداء حقًا. على مر السنين، رأينا العديد من أنواع أجهزة الاستشعار المستخدمة في وحدات IMU، ولكن MEMS و FOG تبرز بسبب تطبيقها الواسع عبر الصناعات. يأتي كل نوع من أجهزة الاستشعار مزودًا بنقاط القوة والضعف الخاصة به، اعتمادًا على التطبيق والبيئة التي يتم استخدامه فيها. أدناه، سأقوم بتحليل كل من وحدات MEMS IMU و FOG IMUs ، ثم مقارنة الاثنين من حيث الأداء والتكلفة والموثوقية.
MEMS IMU: نظرة عامة على MEMS IMU وتطبيقاتها
الأنظمة الكهروميكانيكية الدقيقة، أو MEMS IMUs ، ثورة في عالم أجهزة الاستشعار. باستخدام مكونات ميكانيكية صغيرة على رقائق السيليكون، تسمح تقنية MEMS بوحدات IMU متكاملة للغاية تجمع بين مقاييس التسارع والجيروسكوبات وأحيانًا مقاييس المغناطيسية في حزمة واحدة صغيرة وبأسعار معقولة. ولهذا السبب ستجد وحدات MEMS IMU في كل جهاز استهلاكي تقريبًا اليوم، بدءًا من الهواتف الذكية وحتى أجهزة تتبع اللياقة البدنية. في الواقع، لقد أصبحت منتشرة جدًا لدرجة أنه من الصعب تخيل الإلكترونيات الحديثة بدونها.
تحظى مستشعرات MEMS بشعبية لأنها تحقق التوازن بين الأداء والحجم والتكلفة. إنها صغيرة الحجم وموفرة للطاقة، مما يجعلها مثالية للأجهزة التي تكون المساحة فيها مرتفعة. لقد عملت في العديد من المشاريع حيث تم استخدام وحدات IMU المستندة إلى MEMS في الإلكترونيات الاستهلاكية ، والتكنولوجيا القابلة للارتداء ، وأنظمة السيارات - وهي المجالات التي تحتاج فيها إلى دقة جيدة ولكن ليس بالضرورة أعلى دقة متوفرة في السوق.
ومع ذلك، فإن وحدات IMU MEMS لها حدودها. على الرغم من أنها فعالة في العديد من التطبيقات، إلا أنها تميل إلى الانحراف بمرور الوقت ويمكن أن تتأثر بالظروف البيئية مثل تقلبات درجات الحرارة. على سبيل المثال، في أنظمة سلامة السيارات ، تعمل وحدات MEMS IMU بشكل جيد في المهام قصيرة المدى مثل اكتشاف المنعطفات الحادة أو التوقف المفاجئ، ولكنها قد تواجه صعوبات في البيئات الأكثر تطلبًا مثل الفضاء الجوي، حيث تعد الدقة على مدى فترات طويلة أمرًا بالغ الأهمية. ومن هنا نبدأ في النظر إلى التقنيات الأخرى، مثل وحدات FOG IMU، عندما تكون الدقة العالية ضرورية.
FOG IMU: جيروسكوب الألياف الضوئية IMU - حالات الاستخدام في التطبيقات عالية الدقة
عندما نحتاج إلى تجاوز الأنظمة الكهروميكانيكية الدقيقة (MEMS) من حيث الأداء والدقة، يأتي دور جيروسكوبات الألياف الضوئية (FOG) غالبًا ما تُستخدم وحدات FOG IMU في الفضاء الجوي والدفاع والمجالات الأخرى حيث يمكن أن يؤدي حتى أصغر خطأ في القياس إلى عواقب وخيمة. تُعرف هذه المستشعرات بدقتها العالية واستقرارها على المدى الطويل، وهي خصائص تعتبر حاسمة في البيئات التي يمكن أن تؤثر فيها القوى الخارجية مثل الاهتزاز أو تغيرات درجة الحرارة بشدة على الأداء.
على عكس MEMS، تستخدم وحدات FOG IMUs خصائص الضوء لاكتشاف التغيرات في السرعة الزاوية. يتم تمرير شعاع من الضوء عبر ملفات من الألياف الضوئية، وعندما تدور وحدة IMU، يتغير هذا المسار، مما يسمح للنظام بقياس الدوران بدقة لا تصدق. الميزة الرئيسية لتقنية الضباب هي عدم وجود أجزاء متحركة. وهذا يعني عددًا أقل من المكونات التي يمكن أن تتآكل بمرور الوقت، وهذا هو السبب في أن وحدات FOG IMU موثوقة للغاية وتميل إلى الاستمرار لفترة أطول من الأنظمة المعتمدة على MEMS.
تعد وحدات FOG IMU مثالية لأنظمة توجيه الصواريخ والمركبات الجوية بدون طيار (UAVs) وحتى الملاحة عبر الأقمار الصناعية . من خلال خبرتي في العمل مع مشاريع الفضاء الجوي عالية الدقة، غالبًا ما نلجأ إلى وحدات FOG IMU عندما نحتاج إلى نظام يمكنه العمل بشكل لا تشوبه شائبة في البيئات التي لا يتوفر فيها نظام تحديد المواقع العالمي (GPS) أو في ظل الظروف القاسية. تعتبر نقطة السعر لأنظمة FOG أعلى، ولكن بالنسبة للتطبيقات المهمة حيث لا يكون الفشل خيارًا، فهي تستحق كل قرش.
MEMS وجيروسكوبات الضباب – مقارنة موجزة
الآن، دعونا نلقي نظرة على كيفية تكديس MEMS و FOG على مر السنين، أتيحت لي الفرصة للعمل مع كلتا التقنيتين، ومن الواضح أن لكل منهما مكانه اعتمادًا على حالة الاستخدام.
- الدقة : هذا هو المكان الذي يتألق فيه الضباب بوضوح. تعد جيروسكوبات الضباب أكثر دقة بكثير، خاصة على مدار فترات طويلة. إنها تظهر الحد الأدنى من الانحراف، مما يجعلها مثالية للتطبيقات التي تتطلب دقة عالية مستدامة، كما هو الحال في الفضاء الجوي أو الدفاع. من ناحية أخرى، توفر جيروسكوبات MEMS دقة جيدة ولكنها قد تعاني من الانحراف بمرور الوقت، مما يعني أنها تحتاج إلى إعادة المعايرة في كثير من الأحيان في المهام عالية الدقة.
- الحجم والتكلفة : تعد وحدات IMUs MEMS أكثر إحكاما وفعالية من حيث التكلفة من وحدات FOG IMUs. وهذا يجعلها الخيار الواضح للإلكترونيات الاستهلاكية والسيارات والتطبيقات التجارية الأخرى حيث يعد الحجم والميزانية من العوامل الحاسمة. أنظمة الضباب، على الرغم من أنها أكثر تكلفة وأكبر حجمًا، تُفضل عندما تكون الدقة المطلقة مطلوبة، ولا يمكن المساس بالأداء.
- المتانة : من حيث المتانة، تتمتع أنظمة الضباب بميزة خاصة في البيئات القاسية. نظرًا لأنها لا تحتوي على أجزاء متحركة، فهي أقل عرضة للتآكل، مما يجعلها مثالية لعمليات النشر طويلة المدى في الظروف القاسية. تعتبر الأنظمة الكهروميكانيكية الدقيقة، بمكوناتها الميكانيكية، متينة بما يكفي لمعظم التطبيقات الاستهلاكية والصناعية ولكنها تميل إلى التحلل بشكل أسرع في ظل الظروف القاسية.
- استهلاك الطاقة : تعد وحدات MEMS IMU أكثر كفاءة في استخدام الطاقة، ولهذا السبب توجد غالبًا في الأجهزة الإلكترونية المحمولة مثل الهواتف الذكية وأجهزة تتبع اللياقة البدنية. من ناحية أخرى، تستهلك وحدات FOG IMU المزيد من الطاقة بسبب الأنظمة البصرية التي تستخدمها، مما يجعلها أقل ملاءمة لتطبيقات الطاقة المنخفضة ولكنها مقبولة تمامًا في مجالات مثل الفضاء الجوي أو الدفاع، حيث الطاقة ليست محدودة.
شرح مواصفات أداء IMU
عندما يتعلق الأمر باختيار وحدة القياس بالقصور الذاتي (IMU) المناسبة لأي تطبيق معين، فإن فهم مواصفات أدائها أمر بالغ الأهمية. تحدد هذه المواصفات مدى جودة أداء IMU في ظروف العالم الحقيقي، خاصة عندما تكون الدقة والاستقرار من المتطلبات الأساسية. على مر السنين، رأينا بشكل مباشر كيف يمكن لعوامل أداء معينة، مثل عدم استقرار التحيز أو كثافة الضوضاء، أن تؤدي إلى نجاح المشروع أو فشله - خاصة في مجالات مثل الفضاء الجوي والدفاع والروبوتات عالية الدقة. دعنا نتعرف على بعض المواصفات الأساسية التي تحتاج إلى تقييم بعناية.
1. عدم الاستقرار المتحيز
يعد عدم استقرار التحيز أحد تلك العوامل التي غالبًا ما يتم التغاضي عنها ولكن لها تأثير كبير في التطبيقات عالية الدقة . في الأساس، يشير عدم استقرار التحيز إلى الاختلافات الصغيرة والعشوائية في خرج المستشعر عندما يجب أن تكون قراءته صفرًا. بعبارات بسيطة، إنه "انجراف" IMU عندما يكون ثابتًا.
في التطبيقات العملية، يعد عدم استقرار التحيز مهمًا لأنه يؤثر على مدى قدرة النظام على الحفاظ على الدقة بمرور الوقت. تخيل نظام توجيه صاروخي أو قمر صناعي يعمل في الفضاء. وكلاهما يعتمد على بيانات دقيقة للغاية على مدى فترات طويلة. يمكن أن يؤدي أي انحراف ناتج عن عدم استقرار التحيز إلى أخطاء تراكمية خطيرة، مما يؤدي إلى انحراف النظام عن مساره. ولهذا السبب، عند العمل مع العملاء في مجال الطيران، نولي دائمًا أهمية كبيرة لعدم الاستقرار المنخفض التحيز - خاصة بالنسبة للمهام طويلة الأمد حيث يمكن أن يكون لأصغر الأخطاء عواقب وخيمة.
2. التحيز الأولي
يعد التحيز الأولي عاملاً حاسماً آخر يؤثر بشكل مباشر على دقة IMU على المدى الطويل. يشير هذا إلى خطأ إزاحة المستشعر في لحظة بدء التشغيل. في الأساس، هذا هو الخطأ الأساسي الموجود قبل إجراء أي قياسات. إذا كان الانحياز الأولي مرتفعًا جدًا، فسيؤثر ذلك على دقة جميع القراءات اللاحقة، مما يجعل النظام بأكمله عرضة للأخطاء.
وهذا مهم بشكل خاص للتطبيقات التي تحتاج فيها وحدة IMU إلى التشغيل لفترات طويلة دون إعادة المعايرة. في أنظمة مثل المركبات ذاتية القيادة أو الطائرات بدون طيار، يجب أن توفر وحدة IMU بيانات دقيقة طوال مدة التشغيل. حتى الانحياز الأولي البسيط يمكن أن يؤدي إلى أخطاء كبيرة بمرور الوقت إذا لم يتم أخذه في الاعتبار. ولهذا السبب، في الأنظمة عالية الدقة، نوصي دائمًا بمعايرة وحدة IMU عند بدء التشغيل لتصحيح الانحياز الأولي قبل أن يصبح مشكلة.
3. النطاق والقرار
عند اختيار وحدة IMU، النطاق والدقة من المواصفات التي يجب دائمًا أخذها في الاعتبار معًا. النطاق الحد الأقصى للتسارع القابل للقياس أو السرعة الزاوية، في حين أن الدقة هي أصغر تغيير يمكن للمستشعر اكتشافه.
إذا كنت تعمل في مشروع ستواجه فيه وحدة IMU قوى عالية، كما هو الحال في نظام اكتشاف حوادث السيارات أو تطبيقات الفضاء الجوي عالية السرعة، فإن وجود مستشعر ذو نطاق كبير أمر بالغ الأهمية. يحتاج النظام إلى التعامل مع الظروف القاسية دون تشبع المستشعر. من ناحية أخرى، إذا تم استخدام IMU في المعدات الموجهة بدقة، مثل الروبوتات الجراحية أو الطائرات بدون طيار، فمن الضروري الحصول على دقة عالية لالتقاط أصغر التغييرات في الحركة.
غالبًا ما نحتاج إلى تحقيق التوازن الصحيح بين النطاق والدقة اعتمادًا على التطبيق. في بعض الحالات، يضحي النطاق الأوسع بالدقة، مما يعني أنه قد يتم تفويت التفاصيل الدقيقة. ومع ذلك، بالنسبة لبعض المشاريع التي تكون فيها الدقة هي الأولوية القصوى، فإننا نعطي الأولوية للدقة الأعلى، حتى لو كان ذلك يعني العمل ضمن نطاق أكثر محدودية.
4. عامل القياس وخطأ القياس
عامل القياس هو في الأساس النسبة بين مخرجات IMU والمدخلات المادية الفعلية. من الناحية المثالية، يجب أن يكون هذا تطابقًا مثاليًا، ولكن في الواقع، كل مستشعر لديه درجة من خطأ المقياس ، وهو الانحراف عن هذه النسبة المثالية.
لماذا يهم هذا؟ لأن عامل القياس يؤثر بشكل مباشر على دقة القياس . عندما يكون خطأ المقياس مرتفعًا جدًا، فإنه يؤدي إلى تحريف القراءات، مما يؤدي إلى إدخال بيانات غير دقيقة إلى النظام. على سبيل المثال، في نظام الطيار الآلي للطائرة بدون طيار، إذا كان عامل القياس معطلاً، فقد يعتقد النظام أنها تحلق في مستوى الطائرة بينما، في الواقع، تميل ببطء إلى جانب واحد. مع مرور الوقت، تتراكم هذه الأخطاء، مما يتسبب في انحراف الطائرة بدون طيار عن مسارها.
عندما نقوم بتطوير أنظمة تكون فيها الدقة أولوية قصوى، فإننا نضمن أن وحدات IMU التي نختارها بها خطأ منخفض النطاق واستقرار عامل النطاق العالي. وبهذه الطريقة، نعلم أن القياسات التي نعتمد عليها دقيقة ومتسقة، حتى على مدى فترات طويلة من التشغيل.
5. الضوضاء وكثافة الضوضاء
الضوضاء سمة متأصلة في أي مستشعر، ووحدات IMU ليست استثناءً. يشير إلى التقلبات العشوائية في خرج المستشعر والتي يمكن أن تحجب الإشارة الفعلية. كثافة الضوضاء مستوى هذه الضوضاء عبر نطاق ترددي محدد.
في التطبيقات عالية الدقة، مثل الروبوتات أو الملاحة عبر الأقمار الصناعية، يعد تقليل الضوضاء أمرًا بالغ الأهمية. إذا كان مستوى الضوضاء مرتفعًا جدًا، يصبح من الصعب التمييز بين الحركات الصغيرة الحقيقية والتقلبات العشوائية في البيانات. هذا هو المكان الذي تصبح فيه كثافة الضوضاء أحد المواصفات الأساسية، خاصة في البيئات الديناميكية حيث يجب التقاط الحركات الدقيقة بدقة.
على سبيل المثال، في الروبوتات الجراحية التي تعتمد على دقة أقل من المليمتر، يمكن أن تؤدي مستويات الضوضاء العالية إلى حدوث أخطاء قد تعرض العملية بأكملها للخطر. لقد تعلمنا من التجربة أنه حتى الكميات الصغيرة من الضوضاء يمكن أن تتحول إلى مشكلات أكبر عندما تكون الدقة أمرًا حيويًا. يضمن اختيار وحدة IMU ذات كثافة ضوضاء منخفضة قدرة المستشعر على التقاط أصغر التغييرات دون أي تداخل.
6. عرض النطاق الترددي ومعدل العينة
عرض النطاق الترددي إلى نطاق الترددات التي يمكن لـ IMU قياسها بدقة، في حين أن معدل العينة هو عدد المرات التي تجري فيها IMU القياسات. تحدد هذه المعلمات معًا مدى قدرة المستشعر على التقاط الأحداث الديناميكية سريعة الحركة.
بالنسبة للتطبيقات عالية السرعة - فكر في الطائرات بدون طيار أو المركبات المستقلة التي تتنقل عبر بيئات معقدة - تعد معدلات العينات الأعلى وعرض النطاق الترددي الأوسع أمرًا بالغ الأهمية. قد يؤدي معدل العينة المنخفض إلى تفويت تفاصيل مهمة في السيناريوهات سريعة الحركة، مما يؤدي إلى استجابات متأخرة أو غير صحيحة من النظام. تخيل سيارة ذاتية القيادة لا تلتقط انحرافًا مفاجئًا بسبب انخفاض معدل العينات، فقد يكون الأمر كارثيًا.
في المقابل، في التطبيقات الأقل ديناميكية، مثل مراقبة الصحة الهيكلية، لا يلزم أن يكون عرض النطاق الترددي ومعدل العينة مرتفعين. المفتاح هنا هو مطابقة مواصفات IMU مع المتطلبات التشغيلية للنظام. لقد وجدنا في كثير من الأحيان أن معدل العينة المنخفض جدًا يؤدي إلى فقدان التفاصيل، في حين أن المعدل المرتفع جدًا يمكن أن يؤدي إلى إرباك النظام ببيانات غير ضرورية. وتحقيق هذا التوازن أمر بالغ الأهمية.
7. المشي العشوائي
المشي العشوائي الأخطاء العشوائية الصغيرة التي تتراكم في مخرجات IMU بمرور الوقت. على الرغم من أن كل خطأ قد يبدو غير مهم في حد ذاته، إلا أنه عند تجميعه، يمكن أن يؤدي إلى انحراف النظام بعيدًا عن موضعه أو اتجاهه الحقيقي.
خلال المهام طويلة المدى، مثل تلك التي تتضمن الطائرات بدون طيار أو الأقمار الصناعية ، يمكن أن يؤدي المشي العشوائي إلى حدوث أخطاء موضعية كبيرة. لقد رأيت حالات أدى فيها السير العشوائي البسيط في مستشعر IMU إلى انحراف أنظمة الملاحة بعيدًا عن مسارها بعد بضع ساعات فقط من التشغيل. في هذه الأنواع من المشاريع، يعد اختيار وحدة IMU ذات مسيرة عشوائية منخفضة أمرًا بالغ الأهمية للحفاظ على الدقة على المدى الطويل.
يصبح السير العشوائي مشكلة بشكل خاص في البيئات التي لا يتوفر فيها نظام تحديد المواقع العالمي (GPS)، حيث لا تستطيع وحدة IMU الاعتماد على مراجع خارجية لتصحيح انحرافها. ولهذا السبب نوصي دائمًا باختبار وتقييم أداء المشي العشوائي لوحدة IMU قبل نشرها في أي نظام عالي الدقة وطويل الأمد.
كيفية اختيار IMU المناسب لتطبيقك
قد يكون اختيار وحدة القياس بالقصور الذاتي (IMU) أمرًا صعبًا. على مر السنين، رأينا بشكل مباشر كيف يمكن أن يؤدي اختيار وحدة IMU الخاطئة إلى تأخير كبير في المشروع، أو تجاوز التكاليف، أو حتى الفشل. المفتاح هو فهم الاحتياجات المحددة لتطبيقك ومواءمتها مع مواصفات أداء IMU. لا توجد وحدة IMU مقاس واحد يناسب الجميع، حيث يتطلب كل مشروع دراسة متأنية لعدة عوامل. دعنا نحلل ما يجب أن تنظر إليه عند اختيار أفضل IMU لاحتياجاتك.
العوامل التي يجب مراعاتها: مواصفات الأداء والبيئة والحجم والتكلفة
أول شيء ننظر إليه دائمًا هو مواصفات الأداء . لم يتم تصميم جميع وحدات IMU بنفس الطريقة، ويعد فهم المواصفات أمرًا بالغ الأهمية لضمان قدرة IMU على التعامل مع متطلبات مشروعك. تتوافق المواصفات الأساسية مثل عدم استقرار التحيز وكثافة الضوضاء ومعدل العينة والنطاق مع متطلبات التطبيق الخاص بك. على سبيل المثال، إذا كنت تعمل في مشروع فضائي عالي الدقة ، فستحتاج إلى وحدة IMU ذات الحد الأدنى من انحراف التحيز والاستقرار العالي. من ناحية أخرى، إذا كانت وحدة IMU ستستخدم في تصنيع جهاز إلكتروني استهلاكي، فقد تعطي الأولوية للتكلفة والحجم على حساب الدقة القصوى.
ولا تقل أهمية عن ذلك البيئة التي ستعمل فيها وحدة IMU. هل سيتعرض لدرجات حرارة شديدة أو اهتزازات أو رطوبة؟ في تطبيقات الدفاع أو الفضاء الجوي، حيث يمكن استخدام IMU في بيئات قاسية أو غير متوقعة، تصبح المتانة عاملاً رئيسياً. تم تصميم وحدات IMU القوية لتحمل هذه الظروف، ولكنها تأتي بتكلفة أعلى ومساحة أكبر. على الجانب الآخر، بالنسبة للبيئات الأكثر تحكمًا، مثل داخل المصنع أو جهاز المستهلك، قد تتمكن من استخدام وحدة IMU أخف وزنًا وأقل تكلفة دون التضحية بالأداء.
الحجم والتكلفة من العوامل الحاسمة، خاصة عند التعامل مع التطبيقات المدمجة أو الحساسة للتكلفة. إذا كنت تقوم بتطوير جهاز يمكن ارتداؤه أو طائرة بدون طيار صغيرة الحجم، على سبيل المثال، فإن حجم IMU واستهلاك الطاقة يمثلان اهتمامات بالغة الأهمية. لقد عملنا في العديد من المشاريع حيث كانت قيود المساحة غير قابلة للتفاوض، وكان اختيار IMU أصغر حجمًا يعتمد على MEMS هو القرار الصحيح. لكن تذكر أن المقايضة مع وحدات IMU الأصغر والأرخص غالبًا ما تكون في الأداء - خاصة من حيث الاستقرار والدقة على المدى الطويل.
التكلفة تلعب دورًا دائمًا أيضًا. في حين أن وحدات IMU لجيروسكوب الألياف الضوئية المتطورة (FOG) توفر دقة لا مثيل لها، إلا أنها أغلى بكثير من الأنظمة المستندة إلى MEMS. إن فهم المفاضلة بين التكلفة والأداء أمر ضروري. إذا كان تطبيقك يمكنه تحمل بعض الانحراف أو يحتاج إلى إعادة المعايرة بمرور الوقت، فقد تكون وحدة MEMS IMU الأقل تكلفة كافية. ولكن إذا كنت تقوم ببناء شيء مثل نظام توجيه صاروخي أو قمر صناعي، فسوف ترغب في الاستثمار في IMU عالي الأداء الذي يمكنك تحمله.
فهم متطلبات التطبيق الخاص بك
قبل اتخاذ أي قرارات، ننصح دائمًا بالتعمق في المتطلبات المحددة لطلبك . كل صناعة وحالة استخدام لها مجموعة من المتطلبات الخاصة بها، وينبغي اختيار IMU وفقًا لذلك. فيما يلي تحليل سريع لما يجب البحث عنه في القطاعات المختلفة:
- التطبيقات الصناعية : في البيئات الصناعية، غالبًا ما تكون القوة والمتانة أمرًا أساسيًا. يجب أن تتحمل وحدات IMU المستخدمة في الآلات أو التصنيع أو المعدات الثقيلة الاهتزازات والغبار ونطاقات درجات الحرارة الواسعة. أنت أيضًا تريد وحدة IMU يمكنها توفير بيانات في الوقت الفعلي بدقة عالية لتحسين أنظمة الأتمتة والتحكم. لقد وجدنا أنه بالنسبة لمعظم المشاريع الصناعية، يمكن لوحدات MEMS IMU متوسطة المدى أن تصل في كثير من الأحيان إلى النقطة المثالية بين المتانة والأداء.
- الإلكترونيات الاستهلاكية : بالنسبة للأجهزة الاستهلاكية مثل الهواتف الذكية أو أجهزة تتبع اللياقة البدنية أو سماعات الواقع الافتراضي، ينصب التركيز عادةً على التكلفة والحجم واستهلاك الطاقة . لا تحتاج هذه التطبيقات إلى دقة من الدرجة العسكرية، ولكنها تتطلب وحدات IMU صغيرة ومنخفضة الطاقة يمكنها الأداء بشكل متسق. تهيمن وحدات MEMS IMU على هذا المجال لأنها غير مكلفة وموفرة للطاقة، مما يجعلها مثالية للأجهزة التي تعمل بالبطارية. لقد عملنا مع مجموعة من الشركات المصنعة في هذا القطاع ويمكننا أن نقول بثقة أنه بالنسبة لمعظم الأجهزة الإلكترونية الاستهلاكية، فإن أكبر التحديات تكمن في إدارة الطاقة والتكامل - وليس بالضرورة الدقة القصوى.
- السيارات : في عالم السيارات، أصبحت وحدات IMU ذات أهمية متزايدة لأنظمة مساعدة السائق المتقدمة (ADAS) والمركبات ذاتية القيادة. هنا، تعد الدقة والموثوقية أمرًا بالغ الأهمية، ولكن الأمر كذلك بالنسبة لفعالية التكلفة، نظرًا لحجم الصناعة. بالنسبة لهذه التطبيقات، ستحتاج إلى وحدة IMU يمكنها تحمل تقلبات درجات الحرارة والاهتزازات الناتجة عن الطريق مع توفير بيانات مستقرة في الوقت الفعلي. نحن نوصي في كثير من الأحيان بوحدات IMU MEMS من فئة السيارات والتي تم تصميمها خصيصًا لهذه الظروف، مما يحقق التوازن بين التكلفة والموثوقية.
- الفضاء الجوي والدفاع : بالنسبة للفضاء الجوي والدفاع، ليس هناك مجال للخطأ. سواء كنت تقوم بتوجيه صاروخ، أو تثبيت قمر صناعي، أو التنقل في طائرة بدون طيار في بيئات لا يتوفر فيها نظام تحديد المواقع العالمي (GPS)، فأنت بحاجة إلى وحدات IMU عالية الأداء يمكنها توفير البيانات بأقل قدر من الانجراف على مدار فترات طويلة. تُستخدم عادةً جيروسكوب الألياف الضوئية (FOG) أو جيروسكوبات الليزر الحلقي (RLG) في هذه التطبيقات نظرًا لدقتها واستقرارها على المدى الطويل. هذه الأنظمة أكثر تكلفة وأكبر حجمًا، ولكن في البيئات عالية المخاطر، فهي تستحق الاستثمار.
الأخطاء الشائعة التي يجب تجنبها عند اختيار IMU
على مر السنين، رأينا بعض الأخطاء الشائعة التي يرتكبها الأشخاص عند اختيار وحدة IMU. تجنب هذه المخاطر يمكن أن يوفر الوقت والمال على المدى الطويل.
- الإفراط في تحديد IMU أو التقليل من تحديده : إحدى المشكلات الأكثر شيوعًا التي واجهناها هي الميل إلى الإفراط في تحديد IMU أو التقليل من تحديده للمشروع. تختار بعض الفرق أعلى مستوى من IMU في السوق، معتقدة أنها ستغطي جميع القواعد، ولكن هذا غالبًا ما يؤدي إلى تكاليف وتعقيدات غير ضرورية. على الجانب الآخر، قد يؤدي اختيار الخيار الأرخص إلى حدوث مشكلات في الأداء، خاصة في البيئات ذات الطلب المرتفع. من الضروري تحقيق التوازن بين مواصفات IMU والاحتياجات الحقيقية للتطبيق، بدلاً من اختيار التطرف.
- تجاهل العوامل البيئية : لقد رأينا مشاريع تفشل لأن الفرق لم تأخذ في الاعتبار بيئة التشغيل. وحدات IMU حساسة للتغيرات في درجات الحرارة والاهتزازات والظروف الخارجية الأخرى. يمكن أن يؤدي تحديد وحدة IMU غير مصممة للعمل في بيئتك المحددة إلى انحراف المعايرة، أو الفشل، أو البيانات غير الدقيقة. تأكد دائمًا من تصميم وحدة IMU للتعامل مع الظروف التي ستواجهها في الاستخدام الواقعي.
- عدم التفكير في قابلية التوسع في المستقبل : من السهل التركيز على احتياجات المشروع الفورية، ولكن إذا كان التطبيق جزءًا من نظام أو خط إنتاج أكبر، فيجب أخذ قابلية التوسع في الاعتبار. سواء كنت تخطط للتوسع في مهام ذات دقة أعلى أو التكامل مع أنظمة تحكم أكثر تقدمًا، فإن اختيار وحدة IMU يمكنها التوسع حسب المتطلبات المستقبلية يمكن أن يوفر الوقت والموارد لاحقًا.
- التغاضي عن متطلبات معالجة البيانات : الخطأ الذي يحدث غالبًا هو الفشل في مراعاة الحمل الحسابي المطلوب لمعالجة بيانات IMU. تولد وحدات IMU عالية الأداء كمية كبيرة من البيانات التي تحتاج إلى معالجتها في الوقت الفعلي. إذا لم تكن الموارد الحسابية للنظام مستعدة لهذا، فلن يتم تحقيق الإمكانات الكاملة لـ IMU. تأكد من أن التطبيق الخاص بك لديه قوة المعالجة والخوارزميات اللازمة للتعامل مع البيانات الواردة.