كخبير متمرس في أنظمة القصور الذاتي، أستطيع أن أقول إن التوجيه بالقصور الذاتي هو تقنية أساسية في العديد من التطبيقات عالية الدقة، من الصواريخ العسكرية والمركبات الفضائية إلى المركبات الجوية بدون طيار (UAVs) والروبوتات . فهو يوفر وسيلة ملاحية موثوقة ومكتفية بذاتها، خاصة في البيئات التي لا تتوفر فيها إشارات GPS أو لا يمكن الاعتماد عليها.
التوجيه بالقصور الذاتي هو أسلوب ملاحي يسمح لجسم ما - مثل صاروخ أو طائرة أو مركبة فضائية أو حتى روبوت - بتحديد موقعه واتجاهه دون الحاجة إلى مراجع خارجية مثل نظام تحديد المواقع العالمي (GPS) أو الرادار أو المنارات. ويعتمد على أجهزة استشعار بالقصور الذاتي ، مثل الجيروسكوبات ومقاييس التسارع ، لقياس التغيرات في السرعة والاتجاه، والتي يتم استخدامها بعد ذلك لحساب موضع الجسم ومساره.
يستكشف هذا الدليل مكوناته وتطبيقاته الأساسية. دعونا نتعمق في أساسيات التوجيه بالقصور الذاتي، مستفيدين من سنوات خبرتنا لتسليط الضوء على كيفية تحقيق هذه التكنولوجيا لملاحة قوية ودقيقة.
جدول المحتويات
ما هو التوجيه بالقصور الذاتي، وما هي المكونات الرئيسية؟
من خلال خبرتي في العمل مع العديد من العملاء في مجالات الطيران والدفاع والروبوتات، أعلم أن أداء أي نظام توجيه بالقصور الذاتي يعتمد على المكونات التي يتكون منها. فيما يلي الأجزاء الرئيسية التي أعتمد عليها في الأنظمة التي عملنا معها:
| عنصر | وصف | وظيفة |
|---|---|---|
| وحدة القياس بالقصور الذاتي (IMU) | يتكون قلب النظام عادةً من الجيروسكوبات ومقاييس التسارع. | يقيس الحركة الدورانية والخطية لتحديد الاتجاه والموضع. |
| الجيروسكوبات | أجهزة استشعار تقيس الحركة الدورانية على طول ثلاثة محاور (الميل، والالتفاف، والانعراج). | تتبع اتجاه الكائن، والتأكد من بقائه في المسار الصحيح. |
| مقاييس التسارع | أجهزة استشعار تقيس التسارع الخطي على طول محاور مختلفة. | قياس التغيرات في السرعة، مما يساعد على حساب الموقع والسرعة. |
| خوارزميات الملاحة | الخوارزميات الرياضية التي تعالج بيانات IMU لحساب الموقع والسرعة والاتجاه. | دمج بيانات الاستشعار لتحديث تقديرات الموقع في الوقت الحقيقي. |
| نظام التحكم | نظام يقوم بضبط حركة الكائن بناءً على الموضع والاتجاه المحسوبين. | يضمن أن الكائن يتبع مسارًا محددًا مسبقًا أو يتكيف مع الأهداف الجديدة. |
| مزود الطاقة | يوفر الطاقة لأجهزة الاستشعار بالقصور الذاتي ونظام التحكم. | يحافظ على تشغيل النظام، غالبًا باستخدام البطاريات الموجودة على متن الطائرة أو وحدات إدارة الطاقة. |
| آليات تقديم الملاحظات (اختياري) | يمكن دمج الأنظمة الخارجية مثل GNSS أو مقاييس المغناطيسية أو البارومترات لتصحيح الانحراف والأخطاء. | ساعد في تصحيح أي انحراف في نظام القصور الذاتي وتحسين الدقة على المدى الطويل. |
كيف تعمل هذه المكونات معًا?
في نظام التوجيه بالقصور الذاتي، يجب أن تعمل المكونات الرئيسية معًا بسلاسة لضمان قدرة النظام على أداء مهام الملاحة والتحكم بدقة وفي الوقت الفعلي. واستنادًا إلى سنوات خبرتي، يعد التآزر بين هذه المكونات أمرًا بالغ الأهمية لتحقيق أداء موثوق. فيما يلي تفصيل لكيفية تفاعل هذه المكونات وعملها معًا:
1. جمع بيانات IMU
في قلب النظام توجد وحدة قياس القصور الذاتي (IMU) ، والتي تتكون من الجيروسكوبات ومقاييس التسارع . تسارع الجسم وحركته الدورانية . اتجاه الجسم (مثل درجة الميل والالتفاف والانعراج)، بينما تقيس مقاييس التسارع التسارع الخطي ، مما يساعد على تتبع التغيرات في السرعة والموضع. تعمل هذه البيانات كأساس لجميع حسابات التنقل اللاحقة.

2. تقوم خوارزميات التنقل بمعالجة البيانات
يتم تمرير البيانات التي تم جمعها بواسطة IMU إلى خوارزميات التنقل ، والتي تستخدم النماذج الرياضية لمعالجة هذه المعلومات. بيانات المستشعر (التسارع ومعدلات الدوران) مع مرور الوقت لحساب موضع الجسم وسرعته واتجاهه . توفر هذه الحسابات بيانات تنقل في الوقت الفعلي تُستخدم للتحكم في النظام وتوجيه الكائن على طول مساره.

3. نظام التحكم يضبط الحركة
واستنادًا إلى مخرجات خوارزميات التنقل، نظام التحكم بإجراء تعديلات في الوقت الفعلي على حركة الكائن. على سبيل المثال، إذا انحرف الجسم عن المسار المطلوب، فسيقوم نظام التحكم بضبط نظام الدفع أو أسطح التحكم (مثل الدفة أو الدفاعات) لتصحيح مساره، مما يضمن بقاء الجسم في المسار المقصود.
4. آليات التغذية الراجعة لتصحيح الانجراف
تم تجهيز العديد من أنظمة التوجيه بالقصور الذاتي أيضًا بآليات التغذية الراجعة ، مثل GNSS (النظام العالمي للملاحة عبر الأقمار الصناعية) أو أجهزة استشعار خارجية أخرى (مثل مقاييس المغناطيسية والبارومترات). تعمل أنظمة التغذية المرتدة هذه جنبًا إلى جنب مع IMU لتصحيح الانحراف والأخطاء بمرور الوقت. خاصة في المهمات طويلة الأمد، توفر المستشعرات الخارجية تصحيحات دورية لإعادة معايرة نظام القصور الذاتي، مما يضمن الحفاظ على الدقة على مدى فترات طويلة.
5. يضمن مصدر الطاقة استقرار النظام
مصدر الطاقة أمرًا بالغ الأهمية لتشغيل جميع مكونات النظام. فهو يضمن أن وحدة IMU ونظام التحكم وخوارزميات الملاحة وآليات التغذية الراجعة تتلقى تدفقًا مستمرًا للطاقة. تعد الإدارة الفعالة للطاقة أمرًا ضروريًا، خاصة بالنسبة للعمليات طويلة الأمد، كما هو الحال في المركبات الفضائية أو أنظمة توجيه الصواريخ، حيث تعد الموثوقية والاستقرار أمرًا بالغ الأهمية.
تطبيقات التوجيه بالقصور الذاتي
التوجيه العصبي تقنية أساسية في مجموعة واسعة من الصناعات التي تتطلب الملاحة المستقلة والتحكم الدقيق . إن القدرة على العمل دون الاعتماد على إشارات خارجية، مثل نظام تحديد المواقع العالمي (GPS) أو إشارات الراديو، تجعل التوجيه بالقصور الذاتي أمرًا لا غنى عنه في العديد من التطبيقات المهمة. فيما يلي المجالات الرئيسية التي تستخدم فيها أنظمة التوجيه بالقصور الذاتي بشكل شائع:
1. العسكرية والدفاع
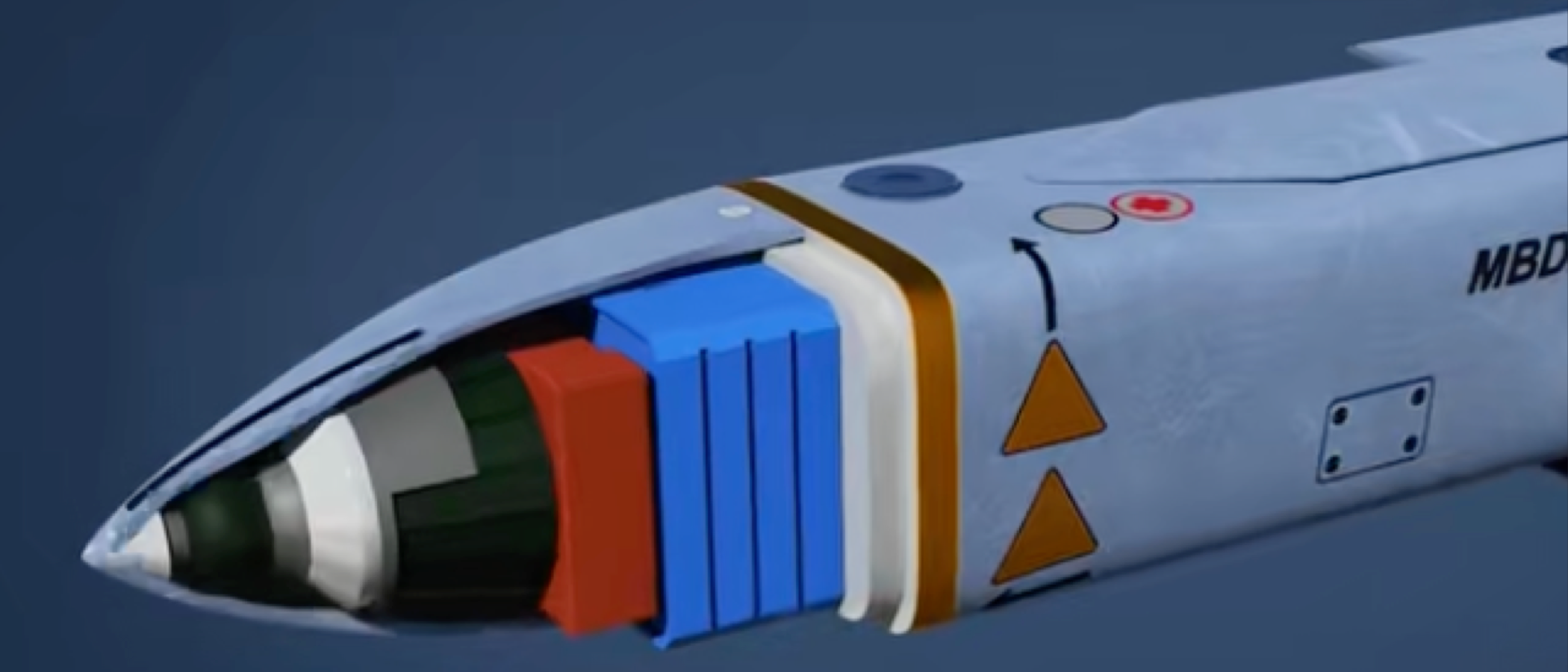
أحد التطبيقات الأكثر شهرة للتوجيه بالقصور الذاتي هو في المجال العسكري والدفاع . تعتبر أنظمة التوجيه بالقصور الذاتي ضرورية لتوجيه الصواريخ والطوربيدات والمركبات الجوية بدون طيار (UAVs) . وتضمن هذه الأنظمة بقاء المقذوفات أو المركبات على المسار الصحيح نحو هدفها، حتى في البيئات التي لا تتوفر فيها إشارات نظام تحديد المواقع العالمي (GPS) أو يتم التشويش عليها عمدًا.
| طلب | غاية | الفائدة الرئيسية |
|---|---|---|
| التوجيه الصاروخي | يضمن إصابة الصواريخ لأهدافها المقصودة | يوفر الدقة والاستقلالية عن الإشارات الخارجية |
| طوربيدات | يتتبع الأهداف تحت الماء في البيئات التي لا يتوفر فيها نظام تحديد المواقع العالمي (GPS). | تعمل في البيئات تحت الماء وتحت الماء |
| الطائرات بدون طيار (الدرونز) | طيران مستقل للمراقبة والاستطلاع | يعمل في المناطق الحضرية أو المناطق التي لا يتوفر فيها نظام تحديد المواقع العالمي (GPS) حيث قد تكون إشارات الأقمار الصناعية ضعيفة |
2. الفضاء الجوي
في تطبيقات الفضاء الجوي لملاحة المركبات الفضائية ، والتحكم في اتجاه الطائرات ، وتحديد مواقع الأقمار الصناعية . فهو يسمح للمهمات الفضائية بالعمل بشكل مستقل دون الاعتماد على مصادر خارجية، وهو أمر مهم بشكل خاص لاستكشاف الفضاء السحيق أو أنظمة الأقمار الصناعية حيث لا تتوفر إشارات GPS.
| طلب | غاية | الفائدة الرئيسية |
|---|---|---|
| الملاحة الفضائية | يضمن الحركة والتوجه الدقيق في الفضاء | يوفر التحكم الذاتي في الفضاء السحيق |
| التحكم في موقف الطائرات | يحافظ على ميل الطائرة وانحرافها وتدحرجها | يضمن الاستقرار والسيطرة في الاضطرابات |
| تحديد المواقع عبر الأقمار الصناعية | يبقي الأقمار الصناعية في المدار أو على المسار الصحيح | تعمل في الفضاء دون الحاجة إلى GPS |
3. المركبات ذاتية القيادة
يعد التوجيه بالقصور الذاتي عنصرًا حاسمًا في المركبات ذاتية القيادة . سواء كان الأمر يتعلق بالسيارات ذاتية القيادة أو الشاحنات ذاتية القيادة أو الطائرات بدون طيار ، فإن التوجيه بالقصور الذاتي يساعد في الحفاظ على التنقل الدقيق حتى عندما تكون إشارات نظام تحديد المواقع العالمي (GPS) ضعيفة أو معاقة أو غير متوفرة. فهو يتيح تحديد الموقع الدقيق في البيئات الحضرية أو الأماكن الموجودة تحت الأرض حيث لا يمكن الاعتماد على نظام تحديد المواقع العالمي (GPS).
| طلب | غاية | الفائدة الرئيسية |
|---|---|---|
| سيارات ذاتية القيادة | يضمن التنقل المستقل عبر البيئات الحضرية | يوفر تتبعًا فوريًا للموقع بدون نظام تحديد المواقع العالمي (GPS). |
| الشاحنات ذاتية القيادة | تمكن الشاحنات من التنقل على الطرق السريعة أو في المستودعات | يوفر تنقلًا مستقلاً في المناطق التي لا يتوفر فيها نظام تحديد المواقع العالمي (GPS). |
| طائرات بدون طيار | تمكن الطائرات بدون طيار من التنقل بدون نظام تحديد المواقع العالمي (GPS) أو في المناطق المحظورة | يضمن رحلة آمنة ودقيقة في البيئات الحضرية أو الداخلية |
4. الملاحة البحرية وتحت الماء
وتستخدم أنظمة التوجيه بالقصور الذاتي بكثافة في الملاحة البحرية والاستكشاف تحت الماء . الغواصات والمركبات ذاتية التحكم تحت الماء (AUVs) والمركبات التي يتم تشغيلها عن بعد (ROVs) على التوجيه بالقصور الذاتي للتنقل عبر المحيطات العميقة ، حيث لا يمكن لإشارات نظام تحديد المواقع العالمي (GPS) الوصول إليها. توفر هذه الأنظمة تتبعًا دقيقًا للموقع وتعديلات للاتجاه لضمان الحركة والاستكشاف الصحيحين.
| طلب | غاية | الفائدة الرئيسية |
|---|---|---|
| الغواصات | الملاحة المستقلة تحت الماء | يوفر ملاحة قائمة بذاتها في البيئات المرفوضة لنظام تحديد المواقع العالمي (GPS). |
| AUVs (مركبات ذاتية القيادة تحت الماء) | يتيح الاستكشاف تحت الماء وجمع البيانات | تعمل في المياه العميقة دون الاعتماد على نظام تحديد المواقع العالمي (GPS). |
| ROVs (المركبات التي يتم تشغيلها عن بعد) | يستخدم للتحكم عن بعد والملاحة تحت الماء | يضمن حركات دقيقة لمهام مثل التفتيش والمسح |
5. الروبوتات والأتمتة الصناعية
في الروبوتات والأتمتة الصناعية ، يساعد التوجيه بالقصور الذاتي في الحفاظ على موضع واتجاه الأذرع الآلية، والمركبات الموجهة الآلية ( AGVs ) ، والأنظمة الآلية الأخرى. تعتمد هذه الأنظمة على التوجيه بالقصور الذاتي لتخطيط المسار الدقيق وتتبع الحركة لتنفيذ المهام في المصانع أو المستودعات أو حتى في البيئات الخطرة.
| طلب | غاية | الفائدة الرئيسية |
|---|---|---|
| الأسلحة الروبوتية | يوفر الدقة في مهام مثل التجميع أو التصنيع | تمكن الروبوتات من تنفيذ المهام بشكل مستقل وبدقة عالية |
| AGVs (المركبات الموجهة الآلية) | التنقل بشكل مستقل في المستودعات أو المصانع | يضمن كفاءة الحركة وتتبع المسار في البيئات الداخلية |
| الجراحة الروبوتية | يضمن حركات دقيقة أثناء الجراحة | يوفر إرشادات دقيقة للأدوات الجراحية أثناء العمليات الجراحية البسيطة |
كيف يختلف التوجيه بالقصور الذاتي عن أنظمة الملاحة بالقصور الذاتي?
إن أنظمة التوجيه بالقصور الذاتي والملاحة بالقصور الذاتي هما تقنيتان مرتبطتان ارتباطًا وثيقًا ولكنهما متميزتان وتخدمان أغراضًا مختلفة، ويعد فهم الاختلافات بينهما أمرًا بالغ الأهمية لاختيار النظام المناسب لتطبيقات محددة.
عندما نتحدث عن التوجيه بالقصور الذاتي ، فإننا نركز في المقام الأول على التوجيه والتحكم في حركة جسم ما، مثل صاروخ أو طائرة بدون طيار أو مركبة فضائية. لا تقوم هذه الأنظمة بتتبع موضع الجسم فحسب، بل تقوم أيضًا بتعديل مساره بشكل فعال لضمان بقائه في المسار الصحيح. من ناحية أخرى، تم تصميم أنظمة الملاحة بالقصور الذاتي لتتبع موقع الجسم وسرعته واتجاهه والإبلاغ عنه دون إجراء تصحيحات بالضرورة على حركته. بينما يوفر INS البيانات ، فإنه لا يتحكم بشكل مباشر في حركة الكائن.
من خلال خبرتي، يعد فهم الفروق الوظيفية بين هذه الأنظمة أمرًا أساسيًا لتطبيقها بفعالية في مجالات مثل الدفاع والفضاء والمركبات ذاتية القيادة . يدور التوجيه بالقصور الذاتي حول تصحيح المسار في الوقت الفعلي واكتساب الهدف ، بينما يتعلق التنقل بالقصور الذاتي بتتبع الموقع والحفاظ على إطار مرجعي دقيق بمرور الوقت.
1. الوظيفة الأساسية
- أنظمة التوجيه بالقصور الذاتي (IGS) : تتمثل الوظيفة الأساسية لنظام التوجيه بالقصور الذاتي في التحكم وتوجيه حركة جسم ما (مثل صاروخ أو طائرة بدون طيار أو مركبة فضائية) نحو هدف أو وجهة محددة. إنه يركز على توجيه الكائن من خلال ضبط مساره بشكل مستمر بناءً على البيانات الواردة من أجهزة الاستشعار الداخلية (الجيروسكوبات ومقاييس التسارع في المقام الأول). يقوم النظام بإجراء تصحيحات في الوقت الفعلي لضمان بقاء الجسم على المسار الصحيح نحو هدفه.
- أنظمة الملاحة بالقصور الذاتي (INS) : في المقابل، تم تصميم أنظمة الملاحة بالقصور الذاتي لتوفير تحديد المواقع والتتبع. فهي تحسب بشكل مستمر موضع الجسم وسرعته واتجاهه بناءً على البيانات الواردة من مقاييس التسارع والجيروسكوبات. الهدف الرئيسي من INS هو تتبع مكان وجود الكائن ومدى سرعة حركته، دون مراجع خارجية (على سبيل المثال، GPS). فهو لا يتحكم بشكل مباشر في حركة الجسم، ولكنه يوفر بيانات دقيقة عن الموقع والسرعة .
2. التحكم مقابل التتبع
- أنظمة التوجيه بالقصور الذاتي : لا تقوم هذه الأنظمة بتتبع موضع الجسم واتجاهه فحسب، بل تتحكم أيضًا في حركته . يقوم نظام التوجيه بحساب التعديلات المطلوبة للحفاظ على مسار أو مسار محدد نحو الهدف. على سبيل المثال، في الصاروخ ، يقوم نظام التوجيه بالقصور الذاتي بضبط مسار طيران الصاروخ لضمان وصوله إلى هدفه، وإجراء تصحيحات في الوقت الفعلي لسرعة الصاروخ واتجاهه وارتفاعه.
- أنظمة الملاحة بالقصور الذاتي : من ناحية أخرى، تركز أنظمة INS بشكل أكبر على تحديد المواقع . مكان وجود الجسم والإبلاغ عنه ، وغالبًا ما يتم استخدامه بالاشتراك مع أنظمة أخرى (مثل نظام تحديد المواقع العالمي) للتصحيح. لا يتحكم نظام INS بالضرورة في حركة الكائن، ولكنه يوفر بيانات مهمة للتنقل ، مما يسمح للمشغلين بمعرفة مكان وجود الكائن بالضبط وأين يتجه.
3. أمثلة التطبيق
- أنظمة التوجيه بالقصور الذاتي: توجد هذه عادةً في جيش, استكشاف الفضاء، و المركبات المستقلة. يتم استخدامها لتوجيه المقذوفات (مثل الصواريخ) أو المركبات الفضائية أو الطائرات بدون طيار، مما يضمن بقائها في المسار الصحيح لإصابة هدف أو إكمال المهمة. على سبيل المثال:
- التوجيه الصاروخي وصول الصاروخ إلى هدفه من خلال تعديل مساره باستمرار بناءً على قياسات القصور الذاتي.
- المركبات الفضائية التوجيه بالقصور الذاتي لضبط مسارها والحفاظ على اتجاهها في الفضاء.
- المركبات الجوية بدون طيار (UAVs) على التوجيه بالقصور الذاتي لتتبع الهدف والطيران المستقل .
- أنظمة الملاحة بالقصور الذاتي: تستخدم أنظمة INS بشكل أساسي في الفضاء الجوي, البحرية، و الروبوتاتالتطبيقات، حيث تعد معرفة الموقع الدقيق واتجاه الكائن أمرًا بالغ الأهمية. على سبيل المثال:
- تستخدم الطائرات للملاحة عند الطيران لمسافات طويلة، خاصة عندما تكون خارج تغطية نظام تحديد المواقع العالمي (GPS).
- الغواصات نظام INS للملاحة تحت الماء، حيث لا تصل إشارات GPS.
- الروبوتات على INS لتتبع الموقع والحركة المستقلة داخل منطقة محددة.
4. التصحيحات في الوقت الحقيقي
- أنظمة التوجيه بالقصور الذاتي : غالبًا ما يستخدم نظام التوجيه البيانات في الوقت الفعلي لإجراء تصحيحات فورية. يقوم النظام باستمرار بضبط مسار الجسم لضمان وصوله إلى هدفه، وغالبًا ما يتضمن آليات تتبع الهدف وردود (مثل أجهزة الاستشعار الخارجية أو نظام تحديد المواقع العالمي) لتصحيح أي انحرافات.
- أنظمة الملاحة بالقصور الذاتي بيانات الموقع في الوقت الفعلي ، فإنه لا يقوم عادةً بإجراء تعديلات على مسار الجسم. وبدلاً من ذلك، فهو يعتمد على التصحيحات الخارجية (مثل نظام تحديد المواقع العالمي (GPS) والرادار) لتقليل الانحراف الناتج عن عدم دقة أجهزة الاستشعار بمرور الوقت. يتتبع INS الحركة ولكنه لا يعمل كقوة تصحيحية أو توجيهية.
5. تعقيد النظام
- أنظمة التوجيه بالقصور الذاتي : هذه الأنظمة عمومًا أكثر تعقيدًا لأنها لا تحتاج إلى حساب الموقع والاتجاه فحسب، بل تحتاج أيضًا إلى ضبط الحركة . خوارزميات تحكم متقدمة وتكاملًا مع أنظمة التوجيه أو تتبع الأهداف الأخرى. تشتمل أنظمة التوجيه غالبًا على آليات مثل المحركات المؤازرة والتحكم في الدفع وأنظمة التحكم في الطيران لإجراء تصحيحات في الوقت الفعلي.
- أنظمة الملاحة بالقصور الذاتي : أنظمة INS أبسط من حيث المفهوم مقارنة بأنظمة التوجيه. وهي مصممة في المقام الأول لتتبع الحركة والإبلاغ عنها، وغالبًا ما تعتمد على دمج أجهزة الاستشعار لتحسين الدقة. تعتبر أنظمة INS ضرورية للتتبع المستمر للموقع ، لكنها لا تتحكم في حركة الجسم.
ملخص الاختلافات:
| وجه | أنظمة التوجيه بالقصور الذاتي (IGS) | أنظمة الملاحة بالقصور الذاتي (INS) |
|---|---|---|
| الوظيفة الأساسية | يرشد ويتحكم في الحركة | يتتبع الموقع والسرعة والاتجاه |
| يتحكم | يتحكم في حركة الكائن (التصحيحات في الوقت الحقيقي) | لا يتحكم في الحركة، بل يتتبع الوضع فقط |
| التطبيقات | العسكرية (الصواريخ)، الفضاء الجوي (المركبات الفضائية)، الطائرات بدون طيار | الفضاء الجوي والبحرية والروبوتات والمركبات ذاتية القيادة |
| التصحيحات | تعديلات في الوقت الحقيقي على المسار | يوفر البيانات؛ يتطلب تصحيحات خارجية مع مرور الوقت |
| تعقيد | أكثر تعقيدا بسبب ميزات التحكم والتوجيه | أبسط، وخاصة لتتبع الموقف |
| تعليق | غالبًا ما يستخدم ردود الفعل لتعديلات المسار | يعتمد عادة على أجهزة الاستشعار الداخلية والتصحيحات الخارجية في بعض الأحيان |
مستقبل التوجيه بالقصور الذاتي
1. تعزيز الدقة والاستقلالية في الدفاع
في التطبيقات العسكرية ، يُستخدم التوجيه بالقصور الذاتي الصواريخ الموجهة ، والمركبات الجوية بدون طيار (UAVs) ، والطائرات بدون طيار المستقلة . ومع دمج أجهزة الاستشعار وخوارزميات الذكاء الاصطناعي ، ستوفر الأنظمة المستقبلية دقة أعلى واستقلالية أكبر وقدرة على العمل في البيئات التي لا تتوفر فيها الإشارات الخارجية (مثل نظام تحديد المواقع العالمي) أو تكون مشوشة.
ما هي الخطوة التالية:
- صواريخ موجهة ذاتية التحكم بالكامل تصحيحات للمسار في الوقت الفعلي .
- طائرات بدون طيار ذاتية الملاحة قادرة على إكمال المهام دون دعم خارجي.
2. استكشاف الفضاء والتحكم بالأقمار الصناعية
وفي مجال استكشاف الفضاء ، التوجيه بالقصور الذاتي بمثابة حجر الزاوية للمسابير الفضائية المستقلة والملاحة عبر الأقمار الصناعية . وبما أن المهمات الفضائية أصبحت أكثر تعقيدًا وبعدًا، فإن التوجيه بالقصور الذاتي سيوفر تحكمًا متواصلًا في الفضاء السحيق وخارج الغلاف الجوي للأرض.
ما هي الخطوة التالية:
- أنظمة القصور الذاتي المتقدمة للمهام بين الكواكب، مما يضمن إجراء تعديلات دقيقة على المسار.
- المسابر الفضائية المستقلة دون الاعتماد على الأنظمة الأرضية.
3. التكامل مع الذكاء الاصطناعي للأداء التكيفي
أنظمة التوجيه بالقصور الذاتي المستقبلية على دمج الذكاء الاصطناعي والتعلم الآلي ، مما يمكّن الأنظمة من التكيف ديناميكيًا مع البيئات المتغيرة. سيؤدي هذا التكامل إلى تحسين تصحيح أخطاء النظام وتعويض الانحراف وتحسين تعديلات المسار بناءً على البيانات في الوقت الفعلي ومعلمات المهمة.
ما هي الخطوة التالية:
- أنظمة توجيه ذاتية التعلم تعمل على تكييف أدائها بشكل مستمر أثناء الطيران أو الحركة.
- اتخاذ قرارات مدعومة بالذكاء الاصطناعي للطائرات بدون طيار والتطبيقات العسكرية، مما يؤدي إلى تحسين الكفاءة التشغيلية.
4. تحسين المتانة والموثوقية في البيئات القاسية
نظرًا أنظمة التوجيه بالقصور الذاتي في البيئات الصعبة بشكل متزايد، مثل أعماق البحار أو الفضاء ، فإن قوتها ستتحسن بشكل كبير. بفضل المواد المتقدمة والتصميمات المبتكرة ، ستصبح هذه الأنظمة أكثر متانة وموثوقية، وستتحمل درجات الحرارة القصوى وتغيرات الضغط والاهتزازات.
ما هي الخطوة التالية:
- أنظمة القصور الذاتي القوية للغواصات ، واستكشاف الفضاء ، والتطبيقات العسكرية عالية الأداء .
- أنظمة زائدة عن الحاجة لضمان الموثوقية حتى في البيئات الأكثر عدائية.
5. التصغير والتكامل مع الأنظمة الذاتية
وسوف يستمر تصغير أجهزة الاستشعار بالقصور الذاتي، مما يسمح باستخدام أنظمة أصغر وأكثر تكاملاً المركبات ذاتية القيادة ، والروبوتات ، وتكنولوجيا الطائرات بدون طيار . إلى تقليل الوزن والتكلفة فحسب، بل ستعزز أيضًا أداء والملاحة المستقلة .
ما هي الخطوة التالية:
- أنظمة توجيه بالقصور الذاتي أصغر حجمًا مدمجة في المركبات الأرضية المستقلة والطائرات بدون طيار لتحسين الاستقلالية في المناطق التي لا يتوفر فيها نظام تحديد المواقع العالمي (GPS).
- التنقل المستقل في البيئات المعقدة مع التوجيه بالقصور الذاتي في الوقت الحقيقي .