وحدات القياس بالقصور الذاتي (IMUs) هي ركائز الملاحة الحديثة. فهي تستشعر كل حركة ودوران وتسارع، وتُزوّد الطائرات بدون طيار والسفن والمركبات البرية وأنظمة الفضاء ببيانات حيوية. ومع ذلك، ورغم دورها الحاسم، غالبًا ما يُساء فهم وحدات القياس بالقصور الذاتي أو استخدامها. قد تتفاقم الأخطاء الصغيرة في مرحلة الدمج لتتحول إلى أعطال تشغيلية جسيمة، مما يؤدي إلى انحراف أو عدم استقرار أو حتى فقدان المهمة. في الحقيقة، لا يقتصر دمج وحدات القياس بالقصور الذاتي على مجرد "توصيل وتشغيل". بل يتطلب دقة وانضباطًا واستبصارًا.
يمكن لأخطاء دمج وحدات القياس بالقصور الذاتي (IMU) أن تُضعف موثوقية الملاحة. بدءًا من سوء المحاذاة والاهتزاز، وصولًا إلى ضعف المعايرة والاعتماد المفرط على دمج المستشعرات، غالبًا ما يكرر المهندسون الأخطاء نفسها. في هذا الدليل، نستكشف الأخطاء العشرة الأكثر شيوعًا في دمج وحدات القياس بالقصور الذاتي (IMU)، ونشرح عواقبها، ونقدم حلولًا احترافية يُمكنك تطبيقها في مشاريعك الخاصة.
جدول المحتويات
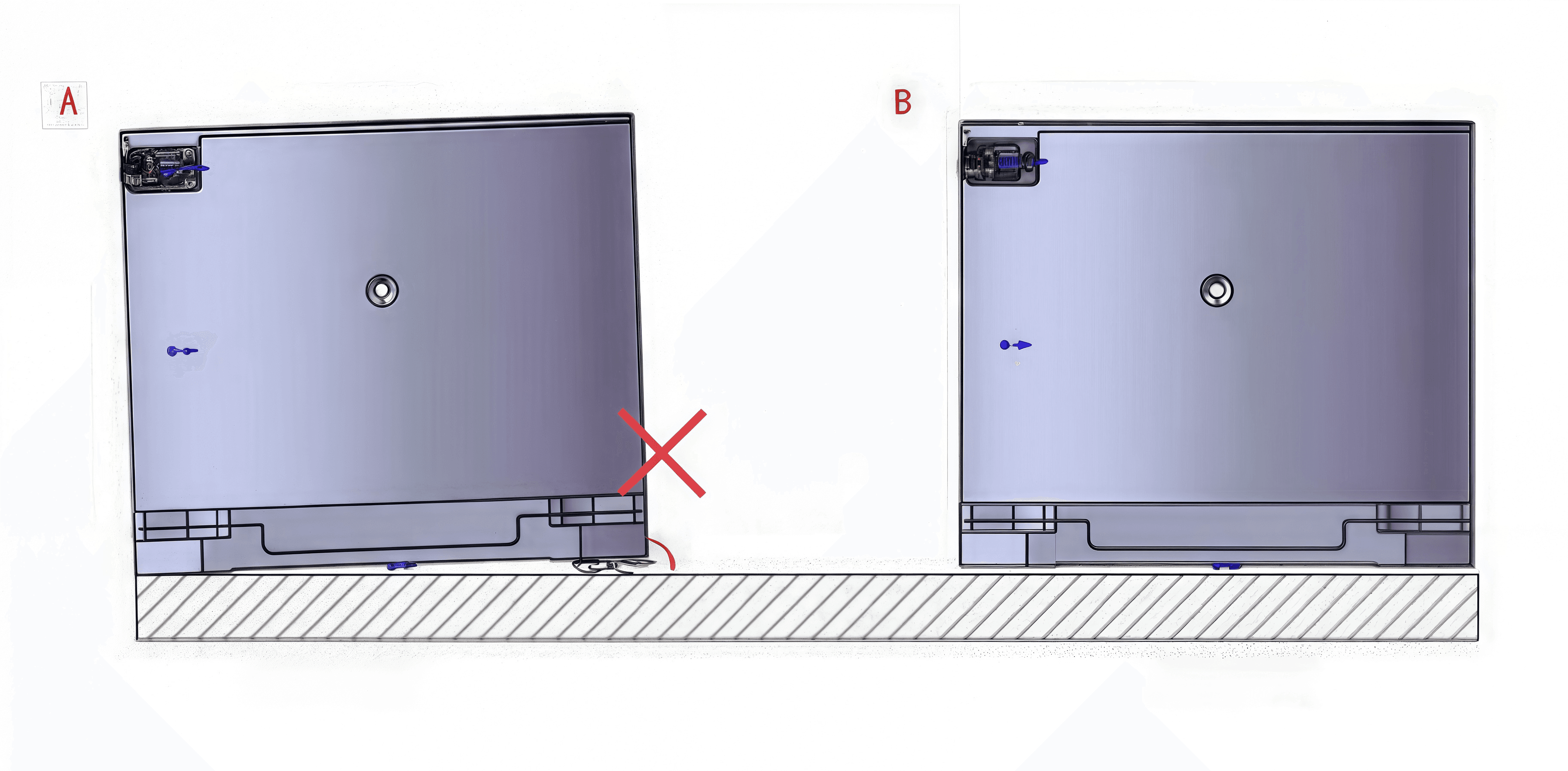
عدم المحاذاة أثناء التثبيت
خطأ:
يقوم المهندسون أحيانًا بتركيب وحدات قياس القصور الذاتي (IMUs) قريبةً بما يكفي من الإطار المرجعي للمنصة دون محاذاة دقيقة. قد تبدو بعض درجات الخطأ بسيطة، لكن في الملاحة، تتفاقم هذه الانحرافات لتصبح أخطاءً جسيمة.
تأثير:
تُسبب المحاور غير المتوافقة انحيازًا منهجيًا في تقديرات الاتجاه والسرعة. وفي المهمات الطويلة، يؤدي هذا إلى زيادة الانحراف، خاصةً في العمليات التي لا تدعم نظام تحديد المواقع العالمي (GPS) حيث تكون وحدة القياس بالقصور الذاتي (IMU) هي المصدر الوحيد للحقيقة. قد تنحرف طائرة بدون طيار ببطء عن مسارها، أو قد تُخطئ مركبة آلية في تقدير اتجاهها.
يصلح:
حدد دائمًا محاور مرجعية في برنامج CAD ، واستخدم أدوات دقيقة مثل أدوات محاذاة الليزر أثناء التركيب. بعد التركيب، قم بمعايرة المحاذاة لقياس وتعويض الانحرافات الطفيفة.
💡نصيحة احترافية: لا تعتمد أبدًا على التحملات الميكانيكية وحدها - معايرة ما بعد التكامل هي شبكة الأمان الخاصة بك.
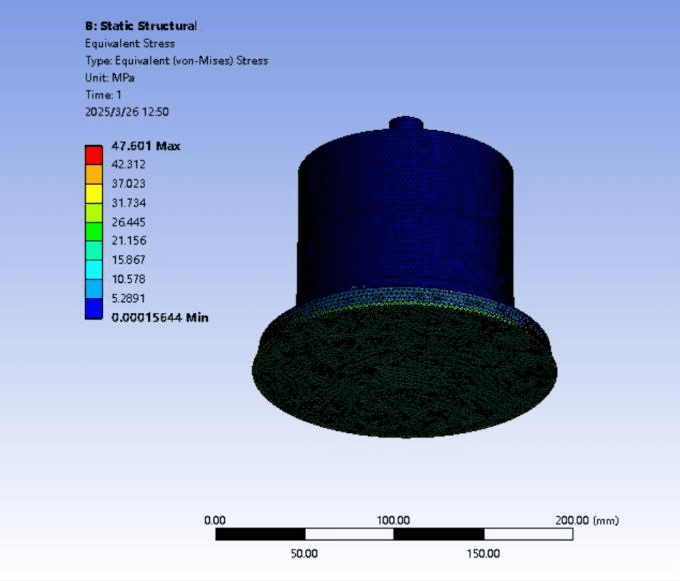
تجاهل عزل الاهتزاز
خطأ:
تركيب وحدة قياس القصور الذاتي مباشرة على الهياكل المهتزة مثل أذرع المروحة أو المحركات أو هيكل السيارة، على افتراض أن المرشحات الداخلية للمستشعر ستعوض ذلك.
تأثير:
يُشوّه الاهتزاز إشارات مقياس التسارع ويُنتج معدلات زاوية خاطئة في الجيروسكوبات. والنتيجة هي مخرجات مشوشة، ومرشحات ملاحة غير مستقرة، واهتزاز واضح في أنظمة التثبيت. في الطائرات أو محاور الدوران، قد يُؤثر الاهتزاز سلبًا على دقة التوجيه.
يصلح:
استخدم عوازل اهتزاز مُعدّلة على الترددات السائدة لمنصتك. اجمع بين التخميد المادي والفلترة الرقمية للتخفيف من الآثار المتبقية. تحقق من الأداء تحت أحمال المهام الفعلية، وليس فقط على طاولات المختبر.
💡نصيحة احترافية: قم دائمًا بإجراء تحليل طيف الاهتزاز لمنصتك قبل الانتهاء من تصميم العزل.
الإشراف على الإدارة الحرارية
خطأ:
بافتراض أن تعويض درجة الحرارة المدمج في وحدة قياس القصور الذاتي يحل جميع المشكلات الحرارية.
تأثير:
تتضمن المهمات الحقيقية تسخينًا سريعًا ناتجًا عن الإلكترونيات، أو عوادم المحركات، أو ظروف النقع البارد. يؤدي ذلك إلى عدم استقرار التحيز، وانحراف عامل المقياس، وانخفاض الدقة. في الفضاء، قد تكون الدورة الحرارية كارثية إذا لم تُؤخذ في الاعتبار.
يصلح:
تصميم نظام تحكم حراري على مستوى النظام. تشمل الخيارات تركيب أغلفة عازلة، أو إضافة موزعات حرارة، أو حتى سخانات مُتحكم بها. راقب أجهزة استشعار درجة الحرارة على متن المركبة لتتبع استقرارها خلال مسار المهمة.
💡نصيحة احترافية: اختبر وحدات IMU تحت دورات حرارية واقعية، وليس فقط نقاط درجة حرارة ثابتة.
اختيار درجة الأداء الخاطئة
خطأ:
يتم اختيار وحدة IMU بناءً على التكلفة أو الحجم أو التوافر فقط، دون مراعاة مدة المهمة أو متطلبات الدقة.
تأثير:
قد تبدو أنظمة MEMS الاستهلاكية مقبولة في الاختبارات القصيرة، لكنها قد تنحرف بشكل لا يمكن السيطرة عليه في سيناريوهات تستغرق ساعات أو في ظروف لا يتوفر فيها نظام تحديد المواقع العالمي (GPS). تُعدّ أنظمة MEMS التكتيكية أو وحدات IMUs FOG ضرورية للمهام الجادة، لكن الفرق غالبًا ما تتجاهلها لخفض الميزانية، مما يؤدي إلى إعادة تصميم مكلفة لاحقًا.
يصلح:
طابق أداء وحدات القياس بالقصور الذاتي (IMU) (عدم استقرار التحيز، والحركة العشوائية، وعرض النطاق الترددي) مع احتياجات المهمة. استخدم أنظمة MEMS الاستهلاكية للطائرات بدون طيار للهواة، وأنظمة MEMS التكتيكية للطائرات بدون طيار والمركبات الدفاعية، وأنظمة FOG للعمليات البحرية أو الفضائية.
| نوع إيمو | سوء الاستخدام الشائع | التطبيق الصحيح |
|---|---|---|
| أنظمة MEMS الاستهلاكية | تم اختياره للتكلفة | الروبوتات القصيرة غير الحرجة |
| الأنظمة الكهروميكانيكية التكتيكية | تم تجاهل السعر | الطائرات بدون طيار، والمركبات البرية غير المأهولة، ومنصات الدفاع |
| الضباب IMU | يُنظر إليه على أنه مبالغة | العمليات البحرية والفضائية والعمليات التي لا تعتمد على نظام تحديد المواقع العالمي (GPS) |
💡نصيحة احترافية: قم دائمًا بتقييم تكلفة دورة حياة فشل المهمة مقابل تكلفة المستشعر الأولية.
استراتيجية المعايرة الضعيفة
خطأ:
الاعتماد فقط على معايرة الشركة المصنعة، على افتراض أنها صالحة عالميًا.
تأثير:
تُسبب التفاوتات الميكانيكية، وأخطاء التركيب، وإجهادات الموصلات انحيازات خاصة بالنظام. وبدون معايرة ثانوية، تُضعف هذه الأخطاء أداء الملاحة ونتائج الاندماج.
يصلح:
قم بإجراء معايرة على مستوى النظام، مثل اختبارات المواضع الستة أو توصيف جدول المعدلات. حدِّث جداول المعايرة في البرنامج الثابت، وكرِّر ذلك دوريًا لضمان الاتساق.
💡نصيحة احترافية: تعامل مع المعايرة كخطوة صيانة متكررة، وليس عملية مصنعية لمرة واحدة.
واجهة غير كافية ومعالجة البيانات
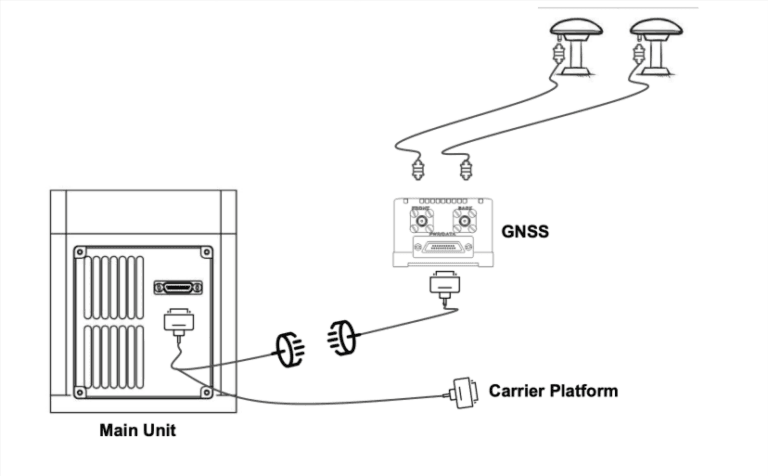
خطأ:
معدلات أخذ العينات غير صحيحة، أو تجاهل زمن الوصول، أو الفشل في مزامنة البيانات مع أجهزة استشعار أخرى.
تأثير:
حتى وحدات القياس بالقصور الذاتي (IMUs) عالية الجودة تصبح غير موثوقة إذا تأخرت بياناتها أو لم تكن متوافقة. يفشل الاندماج مع نظام الملاحة العالمي عبر الأقمار الصناعية (GNSS) أو الليدار (LiDAR ) أو الرؤية عند عدم تطابق الطوابع الزمنية.
يصلح:
صمم أنابيب بيانات متينة. استخدم طوابع زمنية PPS أو طوابع زمنية للأجهزة للحفاظ على مزامنة كل شيء. تحقق من زمن الوصول الشامل من المستشعر إلى المعالج.
💡نصيحة احترافية: فكر في مزامنة الوقت باعتبارها جزءًا من جودة المستشعر، وليس مجرد فكرة ثانوية.
تجاهل التداخل المغناطيسي والتداخل الكهرومغناطيسي
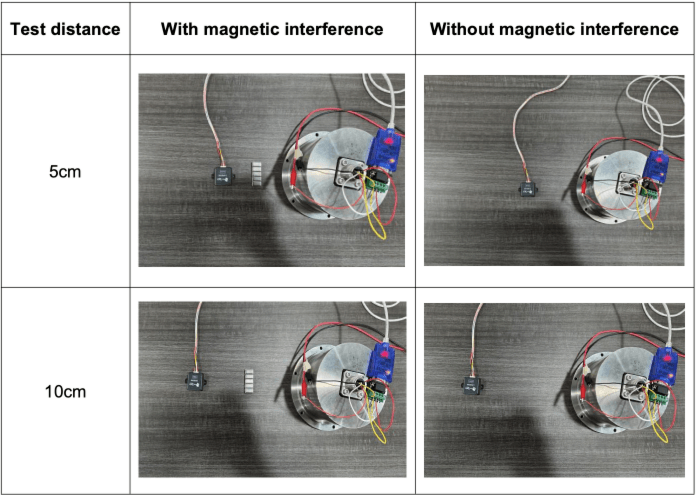
خطأ:
تركيب وحدات IMU بالقرب من المحركات أو الكابلات ذات التيار العالي أو هوائيات التردد اللاسلكي.
تأثير:
تشوّه المجالات المغناطيسية إشارات مقياس التسارع والجيروسكوب. يتداخل ضوضاء التداخل الكهرومغناطيسي مع إلكترونيات المستشعر، مما يُسبب نتائج خاطئة. هذا شائع بشكل خاص في محاور الطائرات بدون طيار، حيث تدفع التصميمات المدمجة المستشعرات إلى الاقتراب بشكل خطير من المحركات.
يصلح:
ضع وحدات القياس بالقصور الذاتي (IMUs) بعيدًا عن مصادر التداخل الكهرومغناطيسي. استخدم علبًا محمية، وكابلات مزدوجة مجدولة، واتّبع إجراءات التأريض. اختبرها تحت حمل كهربائي كامل للكشف عن التداخل الخفي.
💡نصيحة احترافية: يمكن للتصميم الميكانيكي النظيف حل مشاكل التداخل الكهرومغناطيسي بشكل أكثر فعالية من التصفية المعقدة.
عدم مراعاة الانجراف طويل الأمد
خطأ:
التحقق من صحة وحدات قياس القصور الذاتي (IMUs) باستخدام اختبارات قصيرة المدة، وتجاهل الانجراف على مدار ساعات أو أيام.
تأثير:
يتراكم عدم استقرار التحيز، مما يُسبب خطأً في تحديد المواقع يصل إلى كيلومترات. وتصبح الأنظمة التي تعتمد على وحدات القياس بالقصور الذاتي (IMUs) وحدها (الغواصات، والمركبات الفضائية، والطائرات بدون طيار المُعطَّلة بنظام تحديد المواقع العالمي) غير صالحة للاستخدام.
يصلح:
أجرِ اختبارات تحمّل تُحاكي فترات المهمات. اختر وحدات قياس القصور الذاتي التكتيكية أو وحدات قياس القصور الذاتي الضبابية (FOG) لضمان استقرار الملاحة على المدى الطويل.
💡نصيحة احترافية: قم دائمًا بتقييم الانجراف عبر أكثر من 100 ساعة، وليس فقط 10 دقائق في المختبر.
الاعتماد المفرط على دمج المستشعرات
خطأ:
بافتراض أن مرشحات كالمان أو الاندماج القائم على الذكاء الاصطناعي يمكن أن يصلح وحدات القياس بالقصور الذاتي الضعيفة.
تأثير:
مدخلات المستشعر الضعيفة تُلوث المُرشِّح. وبدلًا من تحسين الدقة، يُضاعف الاندماج الأخطاء - "النفايات الداخلة، النفايات الخارجة".
يصلح:
ابدأ ببيانات IMU موثوقة. يُفترض أن يُحسّن الاندماج الأداء، لا أن يُصلح أجهزة الاستشعار التالفة. استخدم التكرار كلما أمكن للتحقق من الإشارات.
💡نصيحة احترافية: تعمل وحدة IMU الجيدة على تقليل تعقيد الفلتر وزيادة المتانة بشكل كبير.
الاستخفاف بالمؤهلات البيئية
خطأ:
اختبار وحدات قياس القصور الذاتي فقط في ظروف المختبر وافتراض أن النتائج الميدانية ستكون هي نفسها.
تأثير:
الرطوبة والغبار والصدمات والطقس القاسي تتجاوز المواصفات التجارية. بدون تأهيل مناسب، تفشل وحدات القياس بالقصور الذاتي في المهام الحرجة.
يصلح:
اختر وحدات قياس القصور الذاتي (IMUs) التي تم اختبارها وفقًا لمعايير MIL-STD-810G أو DO-160 أو ما يعادلها. اطلب بيانات الاختبار، وليس فقط بيانات ورقة البيانات.
💡نصيحة احترافية: اطلب من البائعين تقارير التأهيل - البيانات الحقيقية تتفوق على وعود التسويق.
خاتمة
يُعدّ دمج وحدات القياس بالقصور الذاتي (IMU) فنًا وعلمًا في آنٍ واحد. لا تستطيع أحدث الخوارزميات أو أنظمة التحكم تعويض سوء التركيب أو المعايرة أو الاختبارات غير الكافية. بتجنب الأخطاء العشرة المذكورة هنا، يُمكن للمهندسين إطلاق العنان للإمكانات الحقيقية لوحدات القياس بالقصور الذاتي (IMU) وبناء أنظمة تصمد وتزدهر في الميدان.
في GuideNav ، نوفر مجموعة واسعة من وحدات القياس بالقصور الذاتي (IMUs) المكونة من جيروسكوبات عالية الأداء تعمل بالأنظمة الكهروميكانيكية الصغرى (MEMS) والألياف البصرية والألياف البصرية المصغرة، بالإضافة إلى مقاييس تسارع تعمل بالأنظمة الكهروميكانيكية الصغرى (MEMS) والكوارتز ، وجميعها مؤهلة وفقًا لمعايير بيئية صارمة. منتجاتنا مصممة للطائرات بدون طيار، والأنظمة البحرية، والمركبات الدفاعية، ومنصات الفضاء الجوي حيث لا يكون الأعطال خيارًا. إذا كنت بحاجة إلى وحدة قياس بالقصور الذاتي جاهزة للمهام، فإن خبرائنا على أتم الاستعداد لدعمك في رحلة التكامل.