
وحدة قياس القصور الذاتي (IMU) موثوقة عالميًا
وحدة قياس القصور الذاتي
أكثر من 15000 نظام IMU قيد التشغيل في أكثر من 35 دولة
حلول مخصصة تحظى بثقة كبرى الشركات العالمية
صُممت حلول وحدات القياس بالقصور الذاتي (IMU) من GuideNav لتقديم أداء استثنائي في تطبيقات الفضاء والدفاع والصناعة. سواء كنت بحاجة إلى وحدة MEMS IMU صغيرة الحجم واقتصادية التكلفة، أو وحدة FOG IMU فائقة الدقة، فإننا نوفر لك أحدث التقنيات الموثوقة في أصعب الظروف.
نموذج وحدة قياس القصور الذاتي (IMU) المميز من Guidenav والمبني على تقنية MEMS
نماذج MEMS IMU المميزة
- فعال من حيث التكلفة
- نطاق الجيروسكوب: ± 500 درجة/ثانية
- عدم استقرار الانحياز: ≤ 2 درجة مئوية/ساعة
- ثبات الانحياز: ≤ 10°/ساعة
- الوزن: ≤ 10 غرام
- البروتوكول: UART

- وحدة قياس القصور الذاتي MEMS ذات 10 محاور
- نطاق الجيروسكوب: ± 450 درجة/ثانية
- عدم استقرار الانحياز: ≤ 2°/ساعة
- ثبات الانحياز: ≤ 4°/ساعة
- الوزن: ≤ 40 غرام
- البروتوكول: SPI
- وحدة قياس القصور الذاتي MEMS ذات 10 محاور
- نطاق الجيروسكوب: ± 450 درجة/ثانية
- عدم استقرار الانحياز: ≤ 0.8 درجة مئوية/ساعة
- ثبات الانحياز: ≤ 3°/ساعة
- الوزن: ≤ 40 غرام
- البروتوكول: SPI

- دقة متوسطة إلى عالية
- نطاق الجيروسكوب: ± 320 درجة/ثانية
- عدم استقرار الانحياز: ≤ 0.4 درجة مئوية/ساعة
- ثبات الانحياز: ≤ 2 درجة/ساعة
- الوزن: ≤ 10 غرام
- البروتوكول: RS422

- نطاق جيروسكوب واسع
- نطاق الجيروسكوب: ± 2000 درجة/ثانية
- عدم استقرار الانحياز: ≤ 3 درجة مئوية/ساعة
- ثبات الانحياز: ≤ 10°/ساعة
- الوزن: ≤ 30 غرام
- البروتوكول: UART

- صلب كالبندقية حتى 20000 غرام
- نطاق الجيروسكوب: حتى 6000 درجة/ثانية
- عدم استقرار الانحياز: ≤ 3°/ساعة
- ثبات الانحياز: ≤ 10°/ساعة
- الوزن: ≤ 50 غرام
- البروتوكول: UART

- دقة عالية
- نطاق الجيروسكوب: ± 450 درجة/ثانية
- عدم استقرار الانحياز: ≤ 0.2 درجة مئوية/ساعة
- ثبات الانحياز: ≤ 1 درجة مئوية/ساعة
- الوزن: ≤ 40 غرام
- البروتوكول: RS422

- دقة فائقة
- نطاق الجيروسكوب: ± 400 درجة/ثانية
- عدم استقرار الانحياز: ≤ 0.1 درجة مئوية/ساعة
- ثبات الانحياز: ≤ 0.5 درجة/ساعة
- الوزن: ≤ 55 غرام
- البروتوكول: RS422
وحدة قياس القصور الذاتي القائمة على الألياف الضوئية من Guidenav
نماذج IMU المميزة للضباب

- دقة متوسطة
- استقرار الانحياز (10 ثوانٍ) ≤ 0.1 درجة مئوية/ساعة
- المشي العشوائي الزاوي الجيروسكوبي: ≤0.02 درجة/√h
- نطاق ± 500 درجة/ثانية
- الوزن: أقل من 900 غرام
- دقة متوسطة إلى عالية
- استقرار الانحياز (10 ثوانٍ) ≤ 0.05 درجة مئوية/ساعة
- المشي العشوائي الزاوي الجيروسكوبي: ≤0.005 درجة/√h
- نطاق ± 500 درجة/ثانية
- الوزن: أقل من 1200 غرام

- دقة عالية
- استقرار الانحياز (10 ثوانٍ) ≤ 0.01 درجة مئوية/ساعة
- المشي العشوائي الزاوي الجيروسكوبي: ≤0.0005 درجة/√س
- نطاق ± 300 درجة/ثانية
- الوزن: أقل من 5000 غرام
- دقة فائقة
- استقرار الانحياز (10 ثوانٍ) ≤ 0.005 درجة مئوية/ساعة
- المشي العشوائي الزاوي الجيروسكوبي: ≤0.0003 درجة/√س
- نطاق ± 500 درجة/ثانية
- الوزن: أقل من 5000 غرام
احصل على حلك المخصص الآن
يستحق مشروعك حلاً مصمماً خصيصاً وفقاً لمواصفاتك الدقيقة. ولضمان توفير أفضل وحدات قياس القصور الذاتي (IMU) التي تلبي احتياجاتك، ندعوك لمشاركة المعايير المحددة ومتطلبات الأداء لتطبيقاتك. سواءً كانت الدقة أو الاستقرار أو قيود الحجم، فإن فريقنا على أتم الاستعداد لمساعدتك في إيجاد الحل الأمثل.
جدول المحتويات
قم بتنزيل هذه الصفحة بصيغة PDF
لتوفير وقتك، قمنا أيضًا بإعداد نسخة PDF تحتوي على جميع محتويات هذه الصفحة، ما عليك سوى ترك بريدك الإلكتروني وستحصل على رابط التنزيل على الفور.
تقديم وحدة القياس بالقصور الذاتي (IMU)
ما هي وحدة القياس بالقصور الذاتي؟
وحدة القياس بالقصور الذاتي (IMU) هي جهاز يقيس تسارع الجسم ومعدل دورانه الزاوي، وأحيانًا المجال المغناطيسي، موفرًا بيانات عن حركته واتجاهه. تتكون عادةً من مقاييس تسارع، وجيروسكوبات، وأحيانًا مقاييس مغناطيسية. تُعد وحدات القياس بالقصور الذاتي بالغة الأهمية للأنظمة التي تتطلب ملاحة دقيقة، مثل أنظمة الفضاء والطيران والدفاع والروبوتات، حيث تساعد في الحفاظ على دقة تحديد الموقع والاستقرار دون الاعتماد على مراجع خارجية مثل نظام تحديد المواقع العالمي (GPS).
تطبيقات وحدة القياس بالقصور الذاتي (IMU)
تطبيقات وحدة القياس بالقصور الذاتي (IMU)
01
الفضاء والطيران
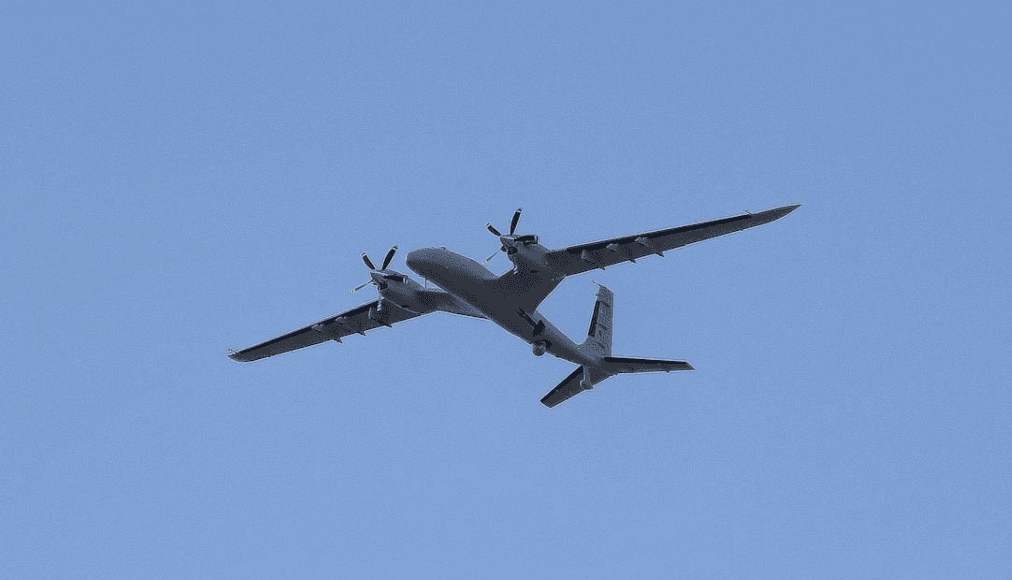
تُعد وحدات القياس بالقصور الذاتي (IMUs) ضرورية لملاحة الطائرات والتحكم بها. فهي تساعد في الحفاظ على اتجاه الطائرة وتوفر بيانات في الوقت الفعلي لأنظمة الطيار الآلي، مما يساعد الطائرات على البقاء على مسارها وتحسين سلامة الطيران.
02
الدفاع والجيش
تُستخدم وحدات القياس بالقصور الذاتي (IMUs) على نطاق واسع في الصواريخ والطائرات المسيّرة والمركبات العسكرية لتوفير تتبع دقيق للحركة والملاحة وتوجيه الأهداف. وهي تُمكّن الأنظمة المستقلة من العمل بدقة حتى في البيئات التي لا تتوفر فيها إشارة نظام تحديد المواقع العالمي (GPS).
03
المركبات ذاتية القيادة والطائرات بدون طيار
في السيارات ذاتية القيادة والطائرات بدون طيار، توفر وحدات القياس بالقصور الذاتي (IMUs) تغذية راجعة مستمرة حول الاتجاه والسرعة والحركة، مما يساعد على استقرار الطيران وضمان الملاحة الدقيقة في البيئات المعقدة.
04
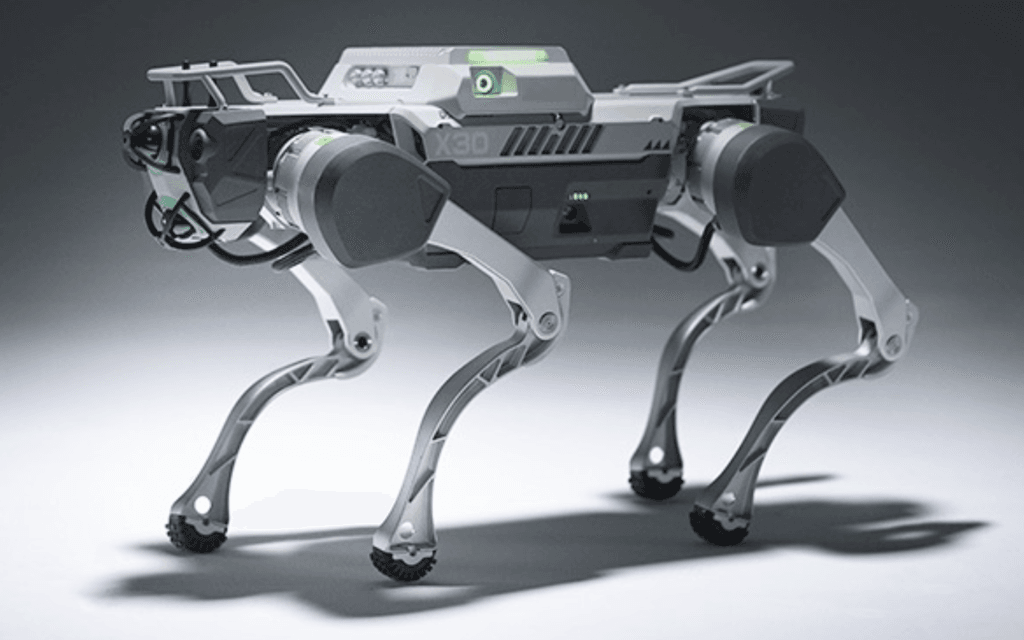
الروبوتات
تُعد وحدات القياس بالقصور الذاتي (IMUs) بالغة الأهمية في مجال الروبوتات للتحكم الدقيق في الحركة. فهي تُستخدم في الروبوتات لتتبع الموقع والاتجاه، مما يُمكّن من الحركة الفعالة والذاتية في الروبوتات الصناعية والطبية والخدمية.
05
المسح الجيوفيزيائي
في مجال الاستكشاف الجيوفيزيائي، تُستخدم وحدات القياس بالقصور الذاتي (IMUs) في المعدات للكشف عن الحركات الزلزالية وقياسها، مما يوفر بيانات قيّمة للبحث العلمي واستكشاف الموارد.


لماذا وحدة قياس القصور الذاتي
لماذا نختار وحدة قياس القصور الذاتي (IMU) بدلاً من الجيروسكوب فقط؟
بينما تقيس كل من وحدات القياس بالقصور الذاتي (IMUs) والجيروسكوبات السرعة الزاوية، توفر وحدة القياس بالقصور الذاتي حلاً أكثر شمولاً من خلال دمج مستشعرات متعددة لتقديم نطاق أوسع من بيانات الحركة والاتجاه. إليك الأسباب الرئيسية
تتبع الحركة الشامل:
في حين أن الجيروسكوب يقيس السرعة الزاوية فقط، فإن وحدة القياس بالقصور الذاتي (IMU) تجمع بين مقاييس التسارع وأحيانًا مقاييس المغناطيسية لتتبع كل من التسارع الخطي والدوران الزاوي، مما يوفر ملف تعريف كامل للحركة ثلاثية الأبعاد.تحديد المواقع بدقة أكبر:
قد تعاني الجيروسكوبات من الانحراف بمرور الوقت. تعمل وحدة القياس بالقصور الذاتي (IMU) على تصحيح هذا الانحراف باستخدام بيانات مقياس التسارع، مما يوفر توجيهًا وتحديدًا أكثر استقرارًا ودقة على مدى فترات أطول.أداء أفضل في البيئات التي لا تتوفر فيها إشارة نظام تحديد المواقع العالمي (GPS):
تعتبر وحدات القياس بالقصور الذاتي (IMUs) مثالية للتطبيقات التي لا يتوفر فيها نظام تحديد المواقع العالمي (GPS)، مثل الأماكن المغلقة أو تحت الماء أو في الفضاء، لأنها تقيس كلاً من التسارع والدوران، مما يوفر بيانات ملاحة كاملة.تصميم نظام مبسط:
تقوم وحدة القياس بالقصور الذاتي (IMU) بدمج أجهزة استشعار متعددة في وحدة واحدة مدمجة، مما يقلل من تعقيد النظام والحاجة إلى مقاييس تسارع وجيروسكوبات منفصلة.




المعايير الرئيسية لوحدة القياس بالقصور الذاتي (IMU)
المواصفات الرئيسية لوحدة القياس بالقصور الذاتي (IMU)
عدم استقرار الانحياز (الجيروسكوب)
: يقيس مدى استقرار الجيروسكوب بمرور الوقت دون مدخلات خارجية، ويُعطى عادةً بوحدة °/ساعة. تشير القيم المنخفضة إلى استقرار أعلى، وهو أمر بالغ الأهمية للتطبيقات الدقيقة مثل الملاحة والتوجيه.الانحراف العشوائي الزاوي
إلى مستوى التشويش في قياسات السرعة الزاوية، ويُقاس بوحدة °/√h. ويضمن انخفاض الانحراف العشوائي أداءً أفضل في العمليات طويلة الأمد.نطاق القياس
أقصى تسارع (g) أو معدل دوران (°/s) يمكن لوحدة القياس بالقصور الذاتي (IMU) قياسه. ويتيح النطاق الأوسع لها التعامل مع بيئات أكثر ديناميكية.عرض النطاق الترددي
مدى سرعة استجابة وحدة القياس بالقصور الذاتي للتغيرات، ويتم قياسه عادةً بالهرتز. يدعم عرض النطاق الترددي الأعلى التطبيقات التي تتطلب تحديثات سريعة للبيانات، مثل الطائرات بدون طيار أو الروبوتات.القدرة على تحمل الظروف البيئية
نطاق درجة حرارة التشغيل ومقاومة الاهتزاز أو الصدمات. وهذا يضمن أداء وحدة القياس بالقصور الذاتي (IMU) بشكل موثوق في الظروف القاسية مثل تطبيقات الفضاء أو التطبيقات العسكرية.
وحدة قياس القصور الذاتي بتقنية MEMS مقابل وحدة قياس القصور الذاتي بالألياف الضوئية: أيهما أفضل؟
اختيار وحدات القياس بالقصور الذاتي (IMU) من نوع MEMS أو الجيروسكوب الليفي البصري (FOG) على متطلبات مشروعك الخاصة. تتميز وحدات MEMS القياسية بصغر حجمها وانخفاض تكلفتها، وهي مثالية للتطبيقات التي تتطلب دقة متوسطة. مع ذلك، تُمكّن التطورات التكنولوجية وحدات MEMS عالية الدقة من تحقيق عدم استقرار في الانحراف يصل إلى 0.1 درجة/ساعة، مما يجعلها مناسبة لبعض التطبيقات العسكرية والفضائية التي كانت تعتمد تقليديًا على وحدات FOG.
مع ذلك، تظل وحدات قياس القصور الذاتي FOG الخيار الأمثل للتطبيقات التي تتطلب دقة فائقة، واستقرارًا طويل الأمد، وموثوقية عالية في البيئات القاسية. فيما يلي مقارنة تفصيلية لمساعدتك في اتخاذ القرار:
| ميزة | وحدة قياس القصور الذاتي MEMS | وحدة قياس القصور الذاتي الضبابية |
|---|---|---|
| دقة | توفر وحدات القياس بالقصور الذاتي (IMU) القياسية بتقنية MEMS دقة متوسطة. أما وحدات القياس بالقصور الذاتي عالية الدقة بتقنية MEMS، فيمكنها تحقيق عدم استقرار في الانحياز يصل إلى 0.1 درجة/ساعة، وهو ما يضاهي وحدات القياس بالقصور الذاتي بتقنية FOG للمبتدئين. | توفر دقة فائقة مع عدم استقرار الانحياز يصل إلى 0.001 درجة/ساعة، مما يجعلها مثالية للعمليات طويلة الأمد والحساسة للمهمة. |
| الحجم والوزن | تتميز هذه الأجهزة بصغر حجمها وخفة وزنها، مما يجعلها مناسبة للأنظمة ذات القيود الصارمة على الحجم والوزن، مثل الطائرات بدون طيار أو الروبوتات. | أكبر حجماً وأثقل وزناً، مصممة للأنظمة التي تفوق فيها الأداء اعتبارات الحجم. |
| التسامح البيئي | مقاومة محسّنة للصدمات والاهتزازات وتغيرات درجات الحرارة، خاصة في تصميمات الأنظمة الكهروميكانيكية الدقيقة المتقدمة. موثوقة لمعظم التطبيقات الصناعية والعسكرية. | موثوقية استثنائية في ظل الظروف القاسية، بما في ذلك الصدمات العالية والاهتزازات ومتطلبات التشغيل المطولة. |
| يكلف | تُعدّ أكثر فعالية من حيث التكلفة، لا سيما في التطبيقات التي تكفي فيها الدقة القياسية. كما أن وحدات القياس بالقصور الذاتي MEMS عالية الدقة أقل تكلفة من وحدات القياس بالقصور الذاتي FOG للحصول على دقة مماثلة. | ارتفاع التكلفة بسبب التكنولوجيا البصرية المعقدة، ولكنه مبرر بالنسبة للأنظمة التي تتطلب استقرارًا ودقة لا مثيل لهما. |
| التطبيقات | مناسب للملاحة العامة في الطائرات بدون طيار والروبوتات والأنظمة الصناعيةوبعض التطبيقات العسكرية إذا تم استخدام أنظمة MEMS عالية الدقة. | مفضل للاستخدام في مجال الطيران والفضاء، والصواريخ، والغواصات، وأنظمة الدفاع الحيوية التي تتطلب استقرارًا طويل الأمد ودقة فائقة. |
تقديم وحدة القياس بالقصور الذاتي (IMU)
سداسية المحاور مقابل
وحدة قياس القصور الذاتي تساعية المحاور
عند البحث عن وحدات القياس بالقصور الذاتي (IMUs)، ستصادف مصطلحات مثل "وحدة قياس بالقصور الذاتي سداسية المحاور" و"وحدة قياس بالقصور الذاتي تساعية المحاور". تشير هذه المصطلحات إلى عدد ونوع المستشعرات المدمجة في الجهاز. إن فهم الفرق بين وحدات القياس بالقصور الذاتي سداسية المحاور وتساعية المحاور يساعدك على اختيار المستشعر المناسب لتطبيقك المحدد.
| ميزة | وحدة قياس بالقصور الذاتي سداسية المحاور | وحدة قياس بالقصور الذاتي ذات تسعة محاور |
|---|---|---|
| عناصر |
مقياس تسارع ثلاثي المحاور، جيروسكوب ثلاثي المحاور |
مقياس تسارع ثلاثي المحاور، جيروسكوب ثلاثي المحاور، مقياس مغناطيسي ثلاثي المحاور |
| الوظائف | يقيس التسارع الخطي والسرعة الزاوية | يقيس التسارع الخطي والسرعة الزاوية والاتجاه المطلق |
| دقة | جيد لتحقيق الاستقرار على المدى القصير | دقة محسّنة مع تقليل الانحراف بمرور الوقت |
| التطبيقات | الطائرات بدون طيار، والروبوتات، والإلكترونيات الاستهلاكية | أنظمة الملاحة، الواقع المعزز، المركبات ذاتية القيادة |
| يكلف | بشكل عام، أسعارها معقولة أكثر | عادة ما تكون أعلى بسبب المستشعر الإضافي |
معايرة وحدة القياس بالقصور الذاتي
ما هي معايرة وحدة القياس بالقصور الذاتي؟
يُعدّ ضبط وحدة القياس بالقصور الذاتي (IMU) بشكل صحيح أمرًا بالغ الأهمية لضمان أدائها بالدقة المطلوبة لتطبيقها المحدد. فبدون الضبط، قد تكون البيانات الواردة من وحدة القياس بالقصور الذاتي غير متسقة، مما يؤدي إلى خلل في أداء النظام. وقد يؤثر ذلك على دقة الملاحة في الطائرات المسيّرة، وتتبع المسار في تطبيقات الفضاء، أو استقرار الروبوتات.
تتكون وحدات القياس بالقصور الذاتي (IMUs) عادةً من مقاييس التسارع، والجيروسكوبات، وأحيانًا مقاييس المغناطيسية. قد يعاني كل مستشعر من هذه المستشعرات من مصادر خطأ مختلفة، مثل تقلبات درجة الحرارة، والإجهاد الميكانيكي، أو تفاوتات التصنيع. تساعد طرق المعايرة في التخفيف من هذه المشكلات لضمان إخراج بيانات دقيقة وموثوقة.
وحدة القياس بالقصور الذاتي مقابل نظام مرجعية الاتجاه والحركة مقابل نظام الملاحة بالقصور الذاتي
وحدة القياس بالقصور الذاتي (IMU) مقابل نظام تحديد الموقع والاتجاه (AHRS) مقابل نظام الملاحة بالقصور الذاتي (INS): ما الفرق؟
- وحدة القياس بالقصور الذاتي (IMU): تقيس التسارع والسرعة الزاوية. وهي توفر بيانات أولية عن الحركة ولكنها لا تحسب الاتجاه أو الموقع.
- نظام AHRS (نظام مرجعي للوضع والاتجاه): يتوسع في نظام IMU من خلال توفير معلومات التوجيه في الوقت الحقيقي (الميل، والدوران، والانعراج) ومعلومات الاتجاه، وغالبًا ما يتم ذلك عن طريق دمج أجهزة قياس المغناطيسية ونظام تحديد المواقع العالمي (GPS).
- نظام الملاحة بالقصور الذاتي (INS): يجمع بين وظائف وحدة القياس بالقصور الذاتي (IMU) والخوارزميات المتقدمة لتوفير بيانات الموقع والسرعة والاتجاه دون الاعتماد على مراجع خارجية مثل نظام تحديد المواقع العالمي (GPS).
| ميزة | وحدة القياس بالقصور الذاتي | نظام AHRS | INS |
|---|---|---|---|
| غاية | يقيس التسارع والسرعة الزاوية | يوفر معلومات عن التوجيه (الميل، والدوران، والانحراف) والاتجاه في الوقت الفعلي | يوفر بيانات الملاحة الكاملة: الموقع والسرعة والاتجاه |
| أجهزة الاستشعار | مقياس التسارع، الجيروسكوب (وأحيانًا مقياس المغناطيسية) | وحدة قياس القصور الذاتي + مقياس المغناطيسية (وأحيانًا نظام تحديد المواقع العالمي GPS) | وحدة قياس القصور الذاتي + خوارزميات متقدمة (غالباً مع نظام تحديد المواقع العالمي أو مدخلات خارجية) |
| مخرجات البيانات | البيانات الأولية (التسارع، السرعة الزاوية) | التوجيه (الميل، الدوران، الانحراف)، الاتجاه | الموقع والسرعة والاتجاه مع مرور الوقت |
| خارجي | يتطلب أنظمة خارجية (نظام تحديد المواقع العالمي، ومقاييس المغناطيسية) لتحديد الاتجاه الكامل | يستخدم أجهزة قياس المغناطيسية ونظام تحديد المواقع العالمي (GPS) لتصحيح الانحراف | يعمل بشكل مستقل (يمكن تعزيزه بنظام تحديد المواقع العالمي GPS) |
| نوع FOG IMU | نطاق السعر | طلب |
|---|---|---|
| وحدات قياس القصور الذاتي للضبابية (IMUs) للمبتدئين | $10,000 - $30,000 | الاستخدام التجاري أو الصناعي العام، والطائرات بدون طيار، والمركبات ذاتية القيادة الأساسية |
| وحدات قياس القصور الذاتي متوسطة المدى بتقنية FOG | $30,000 - $70,000 | تطبيقات عسكرية، ومجال الطيران، والملاحة البحرية عالية الدقة |
| وحدات قياس القصور الذاتي عالية الجودة بتقنية FOG | $70,000 - $100,000+ | التطبيقات الحيوية (توجيه الصواريخ، والفضاء، وأنظمة الدفاع عالية الدقة) |
ما هو النطاق السعري لوحدات قياس القصور الذاتي FOG IMU؟
نطاق أسعار
وحدة القياس بالقصور الذاتي القائمة على تقنية FOG (IMU)
سعر وحدة القياس بالقصور الذاتي (IMU) القائمة على الجيروسكوب الليفي البصري (FOG) بشكل كبير تبعًا للتطبيق المحدد ومتطلبات الأداء والميزات الإضافية. وتشمل العوامل المؤثرة على السعر ما يلي:
- مواصفات الأداء (مثل الدقة والاستقرار)
- الحجم والوزن واستهلاك الطاقة (SWaP-C)
- حماية البيئة (مثلاً، تقويتها لتحمل الظروف القاسية)
- تخصيص لتلبية احتياجات التطبيقات المحددة
للحصول على معلومات حول أسعار وحدات القياس بالقصور الذاتي MEMS، يرجى زيارة صفحة وحدات القياس بالقصور الذاتي MEMS الخاصة بنا
دليل اختيار وحدة القياس بالقصور الذاتي
كيفية اختيار
وحدة قياس القصور الذاتي؟
الخطوة 1
حدد طلبك
ما هو استخدامك الأساسي؟ (على سبيل المثال، الفضاء، الدفاع، الروبوتات، السيارات، الإلكترونيات الاستهلاكية)
ما هو مستوى الدقة والضبط المطلوب؟ (على سبيل المثال، أقل من درجة، دقة عالية)
الخطوة الثانية
نوع وحدة القياس بالقصور الذاتي: MEMS مقابل FOG
- أنظمة MEMS: بأسعار معقولة، وصغيرة الحجم، ومثالية للدقة المنخفضة إلى المتوسطة.
- FOG: دقة عالية، موثوقية، ومناسب للتطبيقات الصعبة.
الخطوة 3
تحديد متطلبات الدقة
اختر مستوى الدقة المطلوب (على سبيل المثال، الدرجات في الساعة للجيروسكوبات) بناءً على تطبيقك.
الخطوة الرابعة
الحجم والوزن
تأكد من أن وحدة القياس بالقصور الذاتي (IMU) تتناسب مع قيود المساحة والطاقة لنظامك، وخاصة بالنسبة للطائرات بدون طيار أو الأجهزة المحمولة.
الخطوة 5
تقييم الظروف البيئية
اختر وحدة قياس بالقصور الذاتي (IMU) يمكنها تحمل العوامل البيئية مثل درجات الحرارة القصوى والصدمات والاهتزازات.
الخطوة 6
خيارات التخصيص والتكامل
تأكد من أن وحدة القياس بالقصور الذاتي (IMU) تدعم الواجهات المناسبة وإخراج البيانات لضمان التكامل السلس مع نظامك.
مصنّع وحدات القياس بالقصور الذاتي
لماذا تختار جايدناف؟
موثوق به من قبل اللاعبين الرئيسيين
تحظى منتجاتنا المتطورة للملاحة بالقصور الذاتي بثقة كبرى المؤسسات في قطاعات الطيران والدفاع والتجارة والصناعة في أكثر من 25 دولة. إن سمعتنا المتميزة في الموثوقية والدقة هي ما يميزنا.
أداء متميز
تتميز منتجاتنا بأداء فائق مع استقرار ممتاز في الانحياز. صُممت وحدة القياس بالقصور الذاتي (IMU) القائمة على تقنية MEMS لتلبية متطلبات التطبيقات الأكثر تطلبًا، حيث تصل دقة عدم استقرار الانحياز إلى ≤0.1 درجة/ساعة.
أثبتت فعاليتها في البيئات القاسية
تم تصميم حلولنا لتحمل الظروف القاسية، مما يوفر أداءً ثابتاً في البيئات الصعبة.
أداء ممتاز في ظل الاهتزازات
تتفوق تقنية MEMS و FOG IMU الخاصة بنا في بيئات الاهتزاز العالي، مما يضمن الدقة والاستقرار حتى في أكثر بيئات التشغيل تحديًا.
نظام التوصيل والتشغيل
تم تصميم أنظمتنا لسهولة التكامل، حيث تقدم حلولاً جاهزة للاستخدام تعمل على تبسيط عملية التثبيت وتقليل وقت الإعداد، مما يسمح لك بالتركيز على مهمتك.
خالٍ من قيود الاتجار الدولي بالأسلحة
منتجاتنا خالية من قيود لوائح الاتجار الدولي بالأسلحة (ITAR)، مما يمنحك ميزة إجراء معاملات دولية أسهل وتقليل العقبات التنظيمية. اختر GuideNav لعمليات عالمية سلسة.
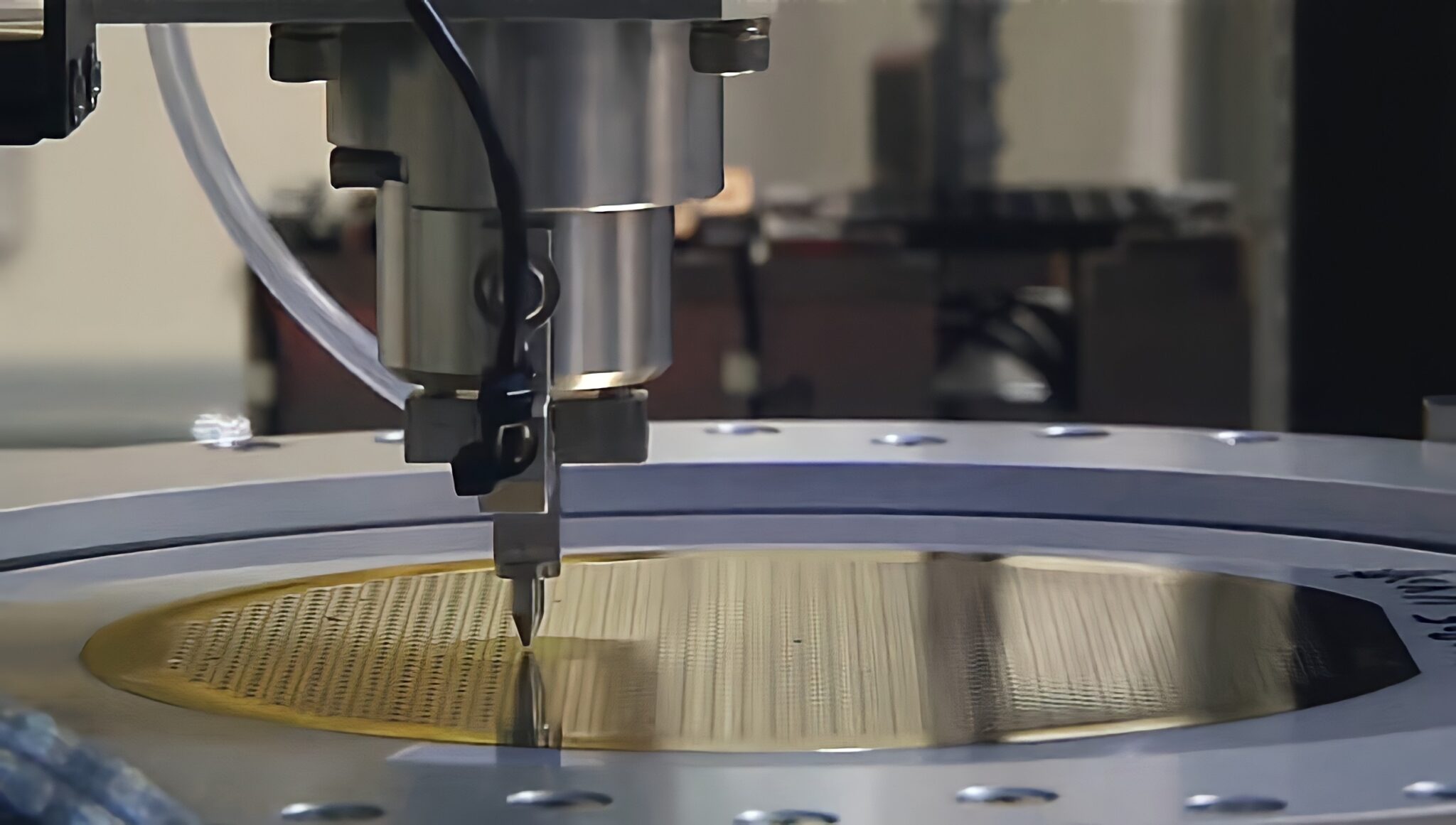
مصنعنا - شاهد بنفسك لتصدق








لماذا تختارنا؟
حلول شاملة لجميع احتياجاتك في مجال الملاحة
تغطية من الدرجة التجارية
استقرار الانحياز: >0.2 درجة/ساعة
الحل: جيروسكوب/وحدة قياس القصور الذاتي/نظام الملاحة بالقصور الذاتي قائم على MEMS
التطبيقات: الملاحة في السيارات، والمركبات الجوية بدون طيار، والنقل، والروبوتات، إلخ.
تغطية من الدرجة التكتيكية
استقرار الانحياز: 0.05 درجة/ساعة - 0.2 درجة/ساعة
الحل: الجيروسكوب/وحدة القياس بالقصور الذاتي/نظام الملاحة بالقصور الذاتي القائم على الألياف الضوئية وأنظمة MEMS
التطبيقات: عمليات المركبات المدرعة، المدفعية المضادة للطائرات، الاستهداف الدقيق، إلخ.
تغطية مستوى الملاحة
استقرار الانحياز: ≤0.05 درجة/ساعة.
الحل: ألياف بصرية وليزر حلقي.
تطبيقات الجيروسكوب/وحدة القياس بالقصور الذاتي/نظام الملاحة بالقصور الذاتي: التوجيه متوسط المدى وبعيد المدى، والطيران العسكري، والأقمار الصناعية.




الأسئلة الشائعة حول وحدة القياس بالقصور الذاتي
إجابات على أسئلتكم
تتمثل الوظائف الأساسية لوحدة القياس بالقصور الذاتي (IMU) في توفير معلومات التوجيه في الوقت الفعلي (مثل زوايا الميل والدوران والانعراج) ومعلومات الحركة (مثل التسارع الخطي والسرعة الزاوية). تساعد هذه البيانات أنظمة مثل الروبوتات والطائرات بدون طيار والأجهزة المحمولة والمركبات الذكية في الملاحة وتحديد المواقع والتحكم.
يوفر نظام تحديد المواقع العالمي (GPS) معلومات الموقع الجغرافي والسرعة المطلقة عبر تحديد المواقع بالأقمار الصناعية، بينما تعتمد وحدة القياس بالقصور الذاتي (IMU) على قياسات المستشعرات الداخلية لتوفير معلومات عن حالة الحركة النسبية وتغيرات الاتجاه. يمكن لوحدات القياس بالقصور الذاتي العمل دون إشارات تحديد المواقع الخارجية، مما يجعلها مفيدة بشكل خاص في البيئات التي تكون فيها إشارات نظام تحديد المواقع العالمي غير متوفرة أو غير موثوقة (مثل الأماكن المغلقة، والأنفاق، أو تحت الماء). عادةً، يؤدي دمج بيانات وحدة القياس بالقصور الذاتي ونظام تحديد المواقع العالمي إلى تحديد مواقع وملاحة أكثر دقة وموثوقية.
تتضمن مخرجات وحدة القياس بالقصور الذاتي (IMU) النموذجية ما يلي:
- بيانات مقياس التسارع ثلاثي المحاور (X، Y، Z)
- بيانات الجيروسكوب ثلاثي المحاور (X، Y، Z)
- (إن وجد) بيانات مقياس المغناطيسية ثلاثي المحاور
- (إن وجدت) بيانات الضغط الجوي والارتفاع
نقدم نوعين رئيسيين من وحدات القياس بالقصور الذاتي (IMUs):
- وحدات قياس القصور الذاتي بتقنية MEMS: أصغر حجمًا وأخف وزنًا وأقل تكلفة، مثالية للتطبيقات متوسطة الدقة. كما نوفر وحدات قياس القصور الذاتي بتقنية MEMS عالية الدقة توفر مستويات دقة تصل إلى 0.1 درجة/ساعة، وهي دقة مماثلة لوحدات قياس الدوران البصري (FOG)للمبتدئين.
- وحدات قياس القصور الذاتي FOG: تتميز بدقة عالية واستقرار، وتستخدم في التطبيقات الصعبة مثل الفضاء والدفاع وأنظمة الملاحة المتطورة.
نعم، وحدات القياس بالقصور الذاتي (IMUs) من GuideNav مناسبة تمامًا للتطبيقات العسكرية. مع التركيز على الدقة العالية والمتانة وإمكانية التخصيص، تلبي وحدات القياس بالقصور الذاتي لدينا المتطلبات الصارمة للعمليات الدفاعية الحساسة، بما في ذلك مهام الاستطلاع والمراقبة والاستطلاع تحت الماء.
نعم، يمكنك استبدال وحدة القياس بالقصور الذاتي (IMU) الحالية لديك بمنتجنا. صُممت وحدة القياس بالقصور الذاتي لدينا لتكون متوافقة مع مجموعة واسعة من الأنظمة والتطبيقات. إليك بعض النقاط الرئيسية التي يجب مراعاتها:
التوافق: يدعم جهاز قياس القصور الذاتي (IMU) الخاص بنا بروتوكولات الاتصال القياسية (مثل SPI وI2C وUART) ويقدم مواصفات مماثلة أو محسّنة مقارنةً بمعظم أجهزة قياس القصور الذاتي الموجودة. وهذا يضمن سهولة دمجه مع نظامك الحالي.
أداء محسّن: توفر وحدة القياس بالقصور الذاتي (IMU) الخاصة بنا دقة أعلى ومستويات ضوضاء أقل واستقرارًا أفضل، مما يمكن أن يعزز الأداء العام لتطبيقك.
ميزات إضافية: اعتمادًا على الطراز، قد تتضمن وحدات القياس بالقصور الذاتي (IMUs) الخاصة بنا أجهزة استشعار إضافية (مثل أجهزة قياس المغناطيسية) وقدرات معالجة بيانات متقدمة، مما يوفر بيانات حركة واتجاه أكثر شمولاً.
الدعم والوثائق: نقدم وثائق مفصلة ودعمًا فنيًا لمساعدتك في عملية الاستبدال، مما يضمن انتقالًا سلسًا دون توقف كبير.
التخصيص: إذا كانت لديك متطلبات محددة، يمكن لفريقنا العمل معك لتخصيص إعدادات وحدة القياس بالقصور الذاتي أو البرامج الثابتة لتناسب احتياجات تطبيقك بشكل أفضل.