
أفضل 10 موردين لوحدات قياس القصور الذاتي (IMU) بتقنية FOG في عام 2025
اكتشف أفضل 10 موردين لوحدات قياس القصور الذاتي بالألياف الضوئية في عام 2025، بما في ذلك هانيويل، وإكسيل، وجايد ناف، وغيرها. قارن بين انحراف الانحياز، والتحكم في التصدير، والأداء التكتيكي لتطبيقات الفضاء والدفاع.
مصادر الخطأ وتقنيات التعويض في أنظمة الملاحة بالقصور الذاتي
تعتمد دقة الملاحة بالقصور الذاتي في نهاية المطاف على مدى جودة نمذجة أخطاء المستشعرات وتعويضها. بدءًا من انحراف الانحياز وصولًا إلى المشي العشوائي، يتطلب التخفيف الفعال مزيجًا من تصميم الأجهزة، وإجراءات المعايرة، والتصحيح الخوارزمي في الوقت الفعلي.
شرح وحدات القياس بالقصور الذاتي MEMS ذات 10 محاور: المكونات والفوائد وحالات الاستخدام
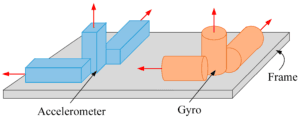
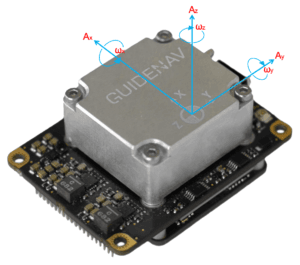
تُقدّم وحدة القياس بالقصور الذاتي MEMS ذات العشرة محاور نقلة نوعية مقارنةً بأجهزة الاستشعار التقليدية ذات الثلاثة أو الستة محاور، وذلك بدمجها الجيروسكوبات ومقاييس التسارع ومقاييس المغناطيسية ومقياس الضغط الجوي في وحدة واحدة مدمجة. يُمكّن هذا الدمج المُحسّن للمستشعرات ليس فقط من تتبع الحركة، بل أيضاً من تحديد الاتجاه والارتفاع بدقة متناهية، وهو أمر بالغ الأهمية لضمان الملاحة والتحكم والاستقرار في البيئات المعقدة أو التي تفتقر إلى نظام تحديد المواقع العالمي (GPS).
كيفية اختيار مقياس التسارع MEMS المناسب؟
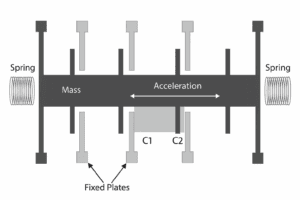
لا يقتصر اختيار مقياس تسارع بتقنية MEMS على البيانات المذكورة في ورقة المواصفات فقط. فعوامل واقعية كالانحراف الحراري، ومقاومة الاهتزاز، وثبات الانحياز في الميدان، غالباً ما تحدد أداء النظام في التطبيقات المهمة. يركز هذا الدليل على ما يهم حقاً في مجالات الدفاع، والفضاء، والروبوتات.
أهم 6 اتجاهات تكنولوجية في وحدات القياس بالقصور الذاتي (IMU) تُشكّل الملاحة التكتيكية في عام 2025
استكشف 6 اتجاهات رئيسية في مجال وحدات القياس بالقصور الذاتي (IMU) - اختراقات MEMS، ودقة FOG، ومعايرة الذكاء الاصطناعي، ومصفوفات IMU، وتحسين SWaP، والملاحة في غياب نظام تحديد المواقع العالمي (GPS) - والتي تعيد تعريف أنظمة التوجيه التكتيكية في عام 2025.
تحليل جهاز EMCORE DSP-3000 FOG: نقاط القوة، حالات الاستخدام، وكيفية مقارنته بالأجهزة الأخرى
قارن بين جيروسكوب الألياف الضوئية EMCORE DSP-3000 و GuideNav GSF30. اكتشف كيف يُقدّم GSF30 أداءً عاليًا في تصميم صغير الحجم ومنخفض الطاقة، مثالي للطائرات بدون طيار، وأنظمة التثبيت، والمنصات المدمجة.