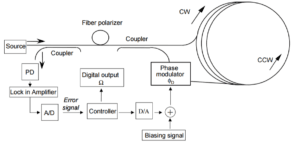
ضبابية الدائرة المفتوحة أم المغلقة؟ فهم الفرق
تتميز أجهزة قياس التذبذب البصري ذات الحلقة المفتوحة بصغر حجمها وانخفاض تكلفتها، مع دقة متوسطة (1-10 درجة/ساعة) مناسبة للطائرات بدون طيار والروبوتات. أما أجهزة قياس التذبذب البصري ذات الحلقة المغلقة فتتميز بدقة فائقة (0.001-0.1 درجة/ساعة)، مما يجعلها ضرورية في الغواصات والصواريخ وأنظمة الفضاء الجوي.

أفضل 10 موردين لأنظمة MEMS INS في عام 2025
تشمل قائمة أفضل 10 موردين لأنظمة MEMS INS في عام 2025 كلاً من Honeywell و Analog Devices و GuideNav و Safran و TDK InvenSense و STMicroelectronics و Sensonor و Silicon Sensing Systems و Aceinna و SBG Systems.
تقنية FOG مقابل تقنية MEMS في الملاحة تحت سطح البحر: أيهما أفضل؟ (الجزء الثاني)
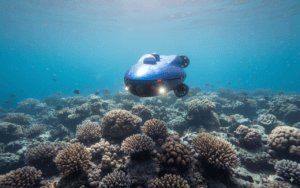
تحافظ الجيروسكوبات FOG على انحراف منخفض للغاية واستقرار طويل الأمد في ظل ظروف تحت سطح البحر التي تفتقر إلى نظام GNSS، بينما توفر وحدات القياس بالقصور الذاتي MEMS بدائل مدمجة ومنخفضة الطاقة تناسب عمليات الفحص قصيرة المدة والمنصات الحساسة للتكلفة.

تقنية الضبابية مقابل تقنية الأنظمة الكهروميكانيكية الدقيقة في الملاحة تحت سطح البحر: أيهما أفضل؟ (الجزء الأول)
تحافظ الجيروسكوبات FOG على انحراف منخفض للغاية واستقرار طويل الأمد في ظل ظروف تحت سطح البحر التي تفتقر إلى نظام GNSS، بينما توفر وحدات القياس بالقصور الذاتي MEMS بدائل مدمجة ومنخفضة الطاقة تناسب عمليات الفحص قصيرة المدة والمنصات الحساسة للتكلفة.
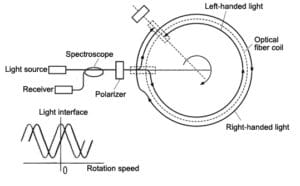
مقارنة بين تقنية FOG وتقنية RLG: تقييم الدقة والموثوقية وتكاليف دورة الحياة
تُعدّ كل من تقنية الجيروسكوب FOG وتقنية الجيروسكوب RLG من التقنيات الراسخة في مجال الملاحة الدفاعية. ولكن عند مقارنة المشترين لهما من منظور التوريد، تُقدّم تقنية FOG التوازن الأمثل بين الأداء والموثوقية وتكلفة دورة الحياة في جميع المهام تقريبًا باستثناء مهام الردع الاستراتيجي.
كيفية اختيار نظام إدارة متكامل، فعال، ويدعمك
قد يؤدي اختيار الجيروسكوب الليفي البصري الخاطئ إلى تأخير المشاريع وزيادة التكاليف. لذا، ينظر المشترون الأذكياء إلى ما هو أبعد من مجرد المواصفات الفنية، ويختارون جيروسكوبًا ليفي بصريًا يتكامل بسلاسة، ويؤدي وظيفته بثبات، ويأتي مع ضمان خدمة طويلة الأمد وضمان التسليم.