وحدات القياس بالقصور الذاتي (IMUs) بمثابة العمود الفقري الصامت للملاحة الحديثة. فهي تستشعر كل حركة ودوران وتسارع، وتُزوّد الطائرات المسيّرة والسفن والمركبات البرية وأنظمة الفضاء الجوي ببيانات حيوية. ومع ذلك، ورغم دورها المحوري، غالبًا ما يُساء فهم وحدات القياس بالقصور الذاتي أو يُساء استخدامها. فالأخطاء البسيطة في مرحلة التكامل قد تتفاقم لتتحول إلى إخفاقات تشغيلية جسيمة، ما يؤدي إلى الانحراف أو عدم الاستقرار أو حتى فشل المهمة. والحقيقة أن دمج وحدات القياس بالقصور الذاتي ليس مجرد عملية توصيل وتشغيل بسيطة، بل يتطلب دقة وانضباطًا وتخطيطًا مُسبقًا.
قد تؤدي أخطاء دمج وحدة القياس بالقصور الذاتي (IMU) إلى الإضرار بموثوقية الملاحة. فمن عدم المحاذاة والاهتزاز إلى ضعف المعايرة والاعتماد المفرط على دمج البيانات الحسية، غالبًا ما يكرر المهندسون نفس الأخطاء. في هذا الدليل، نستعرض أكثر عشرة أخطاء شيوعًا في دمج وحدة القياس بالقصور الذاتي، ونشرح عواقبها، ونقدم حلولًا متخصصة يمكنك تطبيقها في مشاريعك.
جدول المحتويات
عدم المحاذاة أثناء التركيب
خطأ:
أحيانًا يقوم المهندسون بتركيب وحدات القياس بالقصور الذاتي (IMUs) "بشكل كافٍ" بالنسبة للإطار المرجعي للمنصة دون محاذاة دقيقة. قد تبدو بضع درجات من الخطأ طفيفة، ولكن في مجال الملاحة، تتراكم هذه الانحرافات لتصبح أخطاءً جسيمة.
تأثير:
يؤدي عدم محاذاة المحاور إلى تحيز منهجي في تقديرات الوضع والسرعة. وعلى مدار المهمات الطويلة، يتسبب ذلك في زيادة الانحراف، لا سيما في العمليات التي لا يتوفر فيها نظام تحديد المواقع العالمي (GPS) حيث تكون وحدة القياس بالقصور الذاتي (IMU) هي المصدر الوحيد للمعلومات الصحيحة. وقد تنحرف الطائرة بدون طيار ببطء عن مسارها، أو قد تُخطئ المركبة الروبوتية في تقدير اتجاهها.
يصلح:
احرص دائمًا على تحديد محاور مرجعية في برنامج التصميم بمساعدة الحاسوب (CAD) ، واستخدم أدوات دقيقة مثل أدوات محاذاة الليزر أثناء التركيب. بعد التركيب، قم بإجراء معايرة للمحاذاة لقياس الانحرافات الصغيرة وتعويضها.
💡نصيحة احترافية: لا تعتمد أبدًا على التفاوتات الميكانيكية وحدها - معايرة ما بعد التكامل هي شبكة الأمان الخاصة بك.
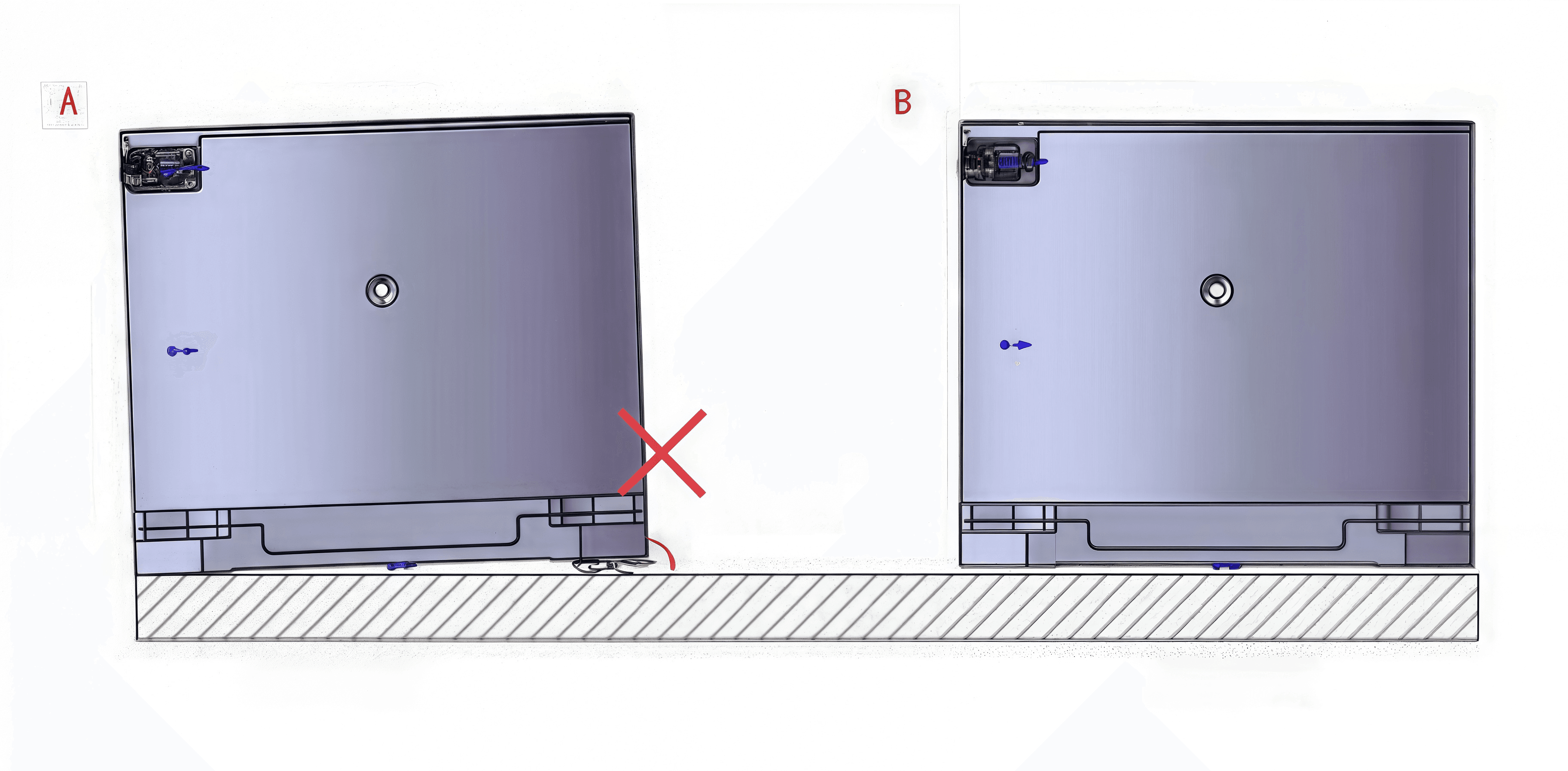
تجاهل عزل الاهتزازات
خطأ:
تركيب وحدة قياس القصور الذاتي (IMU) مباشرة على الهياكل المهتزة مثل أذرع المراوح أو المحركات أو هيكل السيارة، بافتراض أن المرشحات الداخلية للمستشعر ستعوض ذلك.
تأثير:
تُشوّه الاهتزازات إشارات مقياس التسارع وتُنتج معدلات زاوية خاطئة في الجيروسكوبات. والنتيجة هي مخرجات مشوّشة، وفلاتر ملاحة غير مستقرة، واهتزاز ملحوظ في أنظمة التثبيت. في الطائرات أو أنظمة التثبيت المحورية، قد تُؤثر الاهتزازات سلبًا على دقة التوجيه.
يصلح:
استخدم عوازل اهتزاز مضبوطة على الترددات السائدة لمنصتك. اجمع بين التخميد المادي والترشيح الرقمي للتخفيف من التأثيرات المتبقية. تحقق من الأداء تحت أحمال المهمة الحقيقية، وليس فقط في المختبرات.
💡نصيحة احترافية: قم دائمًا بإجراء تحليل طيف الاهتزاز لمنصتك قبل وضع التصميم النهائي للعزل.
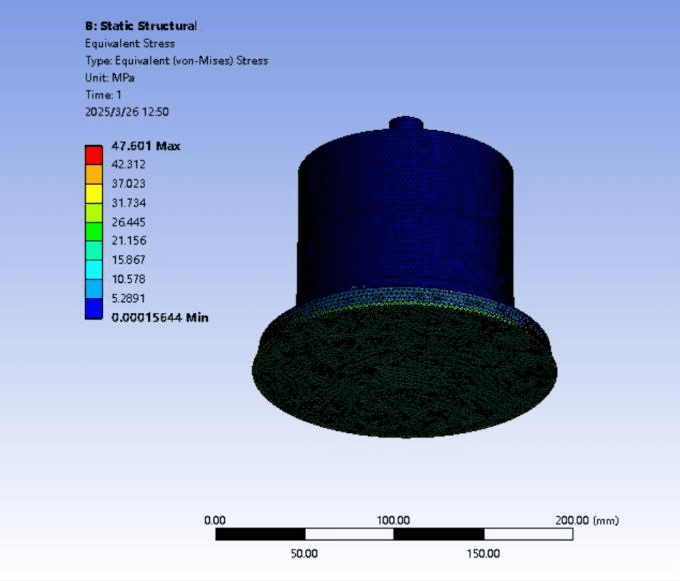
إهمال إدارة الحرارة
خطأ:
بافتراض أن تعويض درجة الحرارة المدمج في وحدة القياس بالقصور الذاتي يحل جميع المشكلات الحرارية.
تأثير:
تتضمن المهمات الحقيقية ارتفاعًا سريعًا في درجة الحرارة نتيجةً لارتفاع درجة حرارة الأجهزة الإلكترونية، أو عادم المحرك، أو التعرض لظروف البرد الشديد. وتؤدي هذه العوامل إلى عدم استقرار الانحياز، وانحراف عامل القياس، وتدهور الدقة. وفي الفضاء، قد تكون التغيرات الحرارية كارثية إذا لم تُؤخذ في الحسبان.
يصلح:
صمم نظام التحكم الحراري على مستوى النظام. تشمل الخيارات عزل الهياكل، وإضافة موزعات حرارية، أو حتى سخانات يتم التحكم بها. راقب مستشعرات درجة الحرارة الموجودة على متن المركبة لتتبع الاستقرار خلال جميع مراحل المهمة.
💡نصيحة احترافية: اختبر وحدات القياس بالقصور الذاتي (IMUs) في ظل دورات حرارية واقعية، وليس فقط نقاط درجة حرارة ثابتة.
اختيار درجة الأداء الخاطئة
خطأ:
اختيار وحدة قياس القصور الذاتي (IMU) بناءً على التكلفة أو الحجم أو التوافر فقط، دون مراعاة مدة المهمة أو متطلبات الدقة.
تأثير:
قد تبدو أنظمة MEMS الاستهلاكية مقبولة في الاختبارات القصيرة، لكنها ستنحرف بشكل لا يمكن السيطرة عليه في سيناريوهات تمتد لساعات أو في حال انقطاع إشارة GPS. تُعد أنظمة MEMS التكتيكية أو وحدات IMU بتقنية FOG ضرورية للمهام الجادة، لكن الفرق غالبًا ما تتجاهلها لخفض الميزانية، مما يؤدي إلى عمليات إعادة تصميم مكلفة لاحقًا.
يصلح:
قم بمطابقة أداء وحدة القياس بالقصور الذاتي (عدم استقرار الانحياز، والمشي العشوائي، وعرض النطاق الترددي) مع متطلبات المهمة. استخدم أنظمة MEMS الاستهلاكية للطائرات بدون طيار الهواة، وأنظمة MEMS التكتيكية للطائرات بدون طيار والمركبات الدفاعية، وأنظمة FOG للعمليات البحرية أو الفضائية.
| نوع وحدة القياس بالقصور الذاتي | سوء الاستخدام الشائع | التطبيق الصحيح |
|---|---|---|
| أنظمة MEMS الاستهلاكية | تم اختيارها بسبب التكلفة | الروبوتات القصيرة وغير الحرجة |
| أنظمة MEMS التكتيكية | تم تجاهله بسبب السعر | الطائرات بدون طيار، والمركبات الأرضية غير المأهولة، والمنصات الدفاعية |
| وحدة قياس القصور الذاتي الضبابية | يُعتبر مبالغة | العمليات البحرية، والفضاء الجوي، والعمليات التي لا تتوفر فيها خدمة نظام تحديد المواقع العالمي (GPS) |
💡نصيحة احترافية: قم دائمًا بتقييم تكلفة دورة حياة فشل المهمة مقابل تكلفة المستشعر الأولية.
استراتيجية معايرة ضعيفة
خطأ:
بالاعتماد فقط على معايرة الشركة المصنعة، بافتراض أنها صالحة عالميًا.
تأثير:
تُسبب التفاوتات الميكانيكية وأخطاء التركيب وإجهادات الموصلات انحرافات خاصة بالنظام. وبدون معايرة ثانوية، تُؤدي هذه الأخطاء إلى تدهور أداء الملاحة ونتائج الدمج.
يصلح:
قم بإجراء معايرة على مستوى النظام، مثل اختبارات ستة أوضاع أو توصيف جدول المعدل. قم بتحديث جداول المعايرة في البرامج الثابتة وكرر ذلك دوريًا لضمان الاتساق.
💡نصيحة احترافية: تعامل مع المعايرة كخطوة صيانة دورية، وليس كعملية مصنع لمرة واحدة.
واجهة غير كافية ومعالجة بيانات غير مناسبة
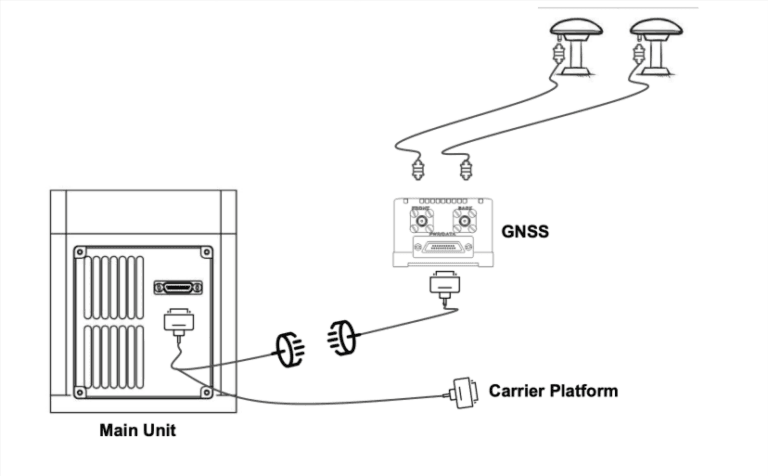
خطأ:
معدلات أخذ العينات غير الصحيحة، أو تجاهل زمن الاستجابة، أو الفشل في مزامنة البيانات مع أجهزة الاستشعار الأخرى.
تأثير:
حتى وحدات القياس بالقصور الذاتي عالية الجودة تصبح غير موثوقة إذا تأخرت بياناتها أو لم تكن متطابقة. ويفشل دمج البيانات مع أنظمة الملاحة عبر الأقمار الصناعية أو تقنية الليدار أو الرؤية عندما لا تتطابق الطوابع الزمنية.
يصلح:
صمم مسارات بيانات قوية. استخدم نبضات في الثانية أو طوابع زمنية للأجهزة للحفاظ على تزامن كل شيء. تحقق من زمن الاستجابة الشامل من المستشعر إلى المعالج.
💡نصيحة احترافية: فكر في مزامنة الوقت كجزء من جودة المستشعر - وليس كأمر ثانوي.
تجاهل التداخل المغناطيسي والكهرومغناطيسي
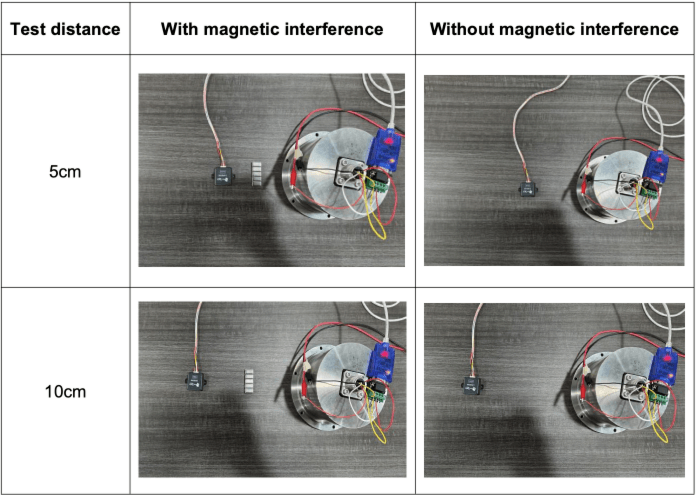
خطأ:
تركيب وحدات القياس بالقصور الذاتي (IMUs) بالقرب من المحركات أو كابلات التيار العالي أو هوائيات الترددات اللاسلكية.
تأثير:
تُشوّه المجالات المغناطيسية إشارات مقياس التسارع والجيروسكوب. ويتداخل التشويش الكهرومغناطيسي مع إلكترونيات المستشعرات، مما يُسبب قراءات خاطئة. وهذا شائعٌ بشكلٍ خاص في أنظمة تثبيت الكاميرات في الطائرات بدون طيار، حيث تدفع التصاميم المدمجة المستشعرات إلى الاقتراب بشكلٍ خطير من المحركات.
يصلح:
ضع وحدات القياس بالقصور الذاتي (IMUs) بعيدًا عن مصادر التداخل الكهرومغناطيسي. استخدم حاويات محمية، وكابلات مزدوجة مجدولة، واتباع ممارسات التأريض. اختبرها تحت الحمل الكهربائي الكامل للكشف عن التداخل الخفي.
💡نصيحة احترافية: يمكن للتصميم الميكانيكي النظيف أن يحل مشاكل التداخل الكهرومغناطيسي بشكل أكثر فعالية من الترشيح المعقد.
عدم مراعاة الانحراف طويل الأمد
خطأ:
التحقق من صحة وحدات القياس بالقصور الذاتي (IMUs) من خلال اختبارات قصيرة المدة، مع تجاهل الانحراف على مدار ساعات أو أيام.
تأثير:
يتراكم عدم استقرار الانحياز، مما يتسبب في خطأ في تحديد الموقع يصل إلى كيلومترات. وتصبح الأنظمة التي تعتمد على وحدات القياس بالقصور الذاتي (الغواصات، والمركبات الفضائية، والطائرات بدون طيار التي تم التشويش على نظام تحديد المواقع العالمي) غير قابلة للاستخدام.
يصلح:
قم بإجراء اختبارات تحمل تحاكي مدة المهمة. اختر وحدات قياس القصور الذاتي التكتيكية أو وحدات قياس القصور الذاتي ذات التذبذب البصري (FOG) لتحقيق استقرار الملاحة على المدى الطويل.
💡نصيحة احترافية: قم دائمًا بتقييم الانحراف على مدار 100 ساعة أو أكثر، وليس فقط 10 دقائق في المختبر.
الاعتماد المفرط على دمج البيانات الحسية
خطأ:
بافتراض أن مرشحات كالمان أو الدمج القائم على الذكاء الاصطناعي يمكنها إصلاح وحدات القياس بالقصور الذاتي الضعيفة.
تأثير:
تؤدي مدخلات المستشعرات الضعيفة إلى تلوث المرشح. فبدلاً من تحسين الدقة، يؤدي الدمج إلى مضاعفة الأخطاء - "مدخلات رديئة، مخرجات رديئة"
يصلح:
ابدأ ببيانات وحدة القياس بالقصور الذاتي (IMU) الموثوقة. يجب أن يُحسّن دمج البيانات الأداء، لا أن يُصلح أعطال المستشعرات. استخدم التكرار حيثما أمكن للتحقق من الإشارات.
💡نصيحة احترافية: وحدة قياس القصور الذاتي الجيدة تقلل من تعقيد المرشح وتزيد من المتانة بشكل كبير.
التقليل من شأن التأهيل البيئي
خطأ:
اختبار وحدات القياس بالقصور الذاتي (IMUs) فقط في ظروف المختبر وافتراض أن نتائج الميدان ستكون هي نفسها.
تأثير:
تتجاوز الرطوبة والغبار والصدمات والظروف الجوية القاسية المواصفات التجارية. وبدون التأهيل المناسب، تفشل وحدات القياس بالقصور الذاتي في المهام الحرجة.
يصلح:
اختر وحدات قياس القصور الذاتي (IMUs) التي تم اختبارها وفقًا لمعيار MIL-STD-810G أو DO-160 أو ما يعادلهما. اطلب بيانات الاختبار، وليس فقط بيانات المواصفات الفنية.
💡نصيحة احترافية: اطلب من البائعين تقارير التأهيل - فالبيانات الحقيقية تتفوق على وعود التسويق.
خاتمة
يُعدّ دمج وحدات القياس بالقصور الذاتي (IMU) فنًا وعلمًا في آنٍ واحد. لا تستطيع أكثر الخوارزميات أو أنظمة التحكم تطورًا التعويض عن سوء التركيب أو المعايرة أو عدم كفاية الاختبار. بتجنب الأخطاء العشرة المذكورة هنا، يستطيع المهندسون إطلاق العنان للإمكانات الحقيقية لوحدات القياس بالقصور الذاتي وبناء أنظمة قادرة على الصمود والازدهار في الميدان.
في جايدناف ، نوفر مجموعة واسعة من وحدات القياس بالقصور الذاتي (IMUs) تتألف من جيروسكوبات عالية الأداء بتقنية MEMS/الألياف الضوئية/الألياف الضوئية المصغرة، ومقاييس تسارع بتقنية MEMS/الكوارتز ، جميعها معتمدة وفقًا لمعايير بيئية صارمة. صُممت منتجاتنا خصيصًا للطائرات بدون طيار، والأنظمة البحرية، والمركبات الدفاعية، ومنصات الفضاء الجوي، حيث لا مجال للفشل. إذا كنت بحاجة إلى وحدة قياس بالقصور الذاتي جاهزة للعمل، فإن خبراءنا على أتم الاستعداد لدعم عملية دمجها.