أجهزة الاستشعار بالقصور الذاتي، بطبيعتها، غير مثالية. فالانحراف في الانحياز، والحركة العشوائية، والحساسية الحرارية ليست حالات شاذة، بل هي سلوكيات متوقعة. المهم ليس التخلص من هذه الأخطاء، بل إدارتها.
على مر السنين، تعلمتُ أن الملاحة بالقصور الذاتي الموثوقة لا تعتمد على مواصفات المستشعر وحدها، بل على مدى فهمك لهذه العيوب وكيفية معالجتها. سواءً كنت تستخدم تقنية MEMS أو FOG، فإن النجاح يتوقف على ما يحدث بعد أن يبدأ المستشعر في إرسال البيانات.
الملاحة بالقصور الذاتي في نهاية المطاف على مدى جودة نمذجة أخطاء المستشعرات وتعويضها. بدءًا من انحراف الانحياز وصولًا إلى المشي العشوائي ، يتطلب التخفيف الفعال مزيجًا من تصميم الأجهزة، وإجراءات المعايرة، والتصحيح الخوارزمي في الوقت الفعلي.
لا يقتصر نظام الملاحة بالقصور الذاتي على المكونات المادية فحسب. فبينما يحدد أداء المكونات المادية الحد الأدنى، فإن الحد الأقصى يتحدد بمدى فعالية إدارة الأخطاء.
جدول المحتويات
لماذا يُعدّ تعويض الأخطاء هو العائق الحقيقي في أنظمة الملاحة بالقصور الذاتي؟
لا تتعطل أنظمة الملاحة بالقصور الذاتي عادةً فجأة، بل تتدهور تدريجيًا . فما يبدأ بانحراف طفيف في الجيروسكوب أو خلل بسيط في مقياس التسارع، يتحول ببطء إلى خطأ متزايد في الاتجاه والسرعة والموقع . لقد رأيت الذاتي تنحرف من دقة أقل من متر إلى حالة غير قابلة للاستخدام في غضون دقائق ، ليس بسبب عطل في المستشعرات، بل بسبب عدم معالجة الخطأ .
مهما بلغت دقة وحدة القياس بالقصور الذاتي (IMU) على الورق، فإن نظام الملاحة بالقصور الذاتي (INS) غير المُعَوَّض سيُعاني من الانحراف دائمًا . وفي البيئات التي لا تتوفر فيها إشارات نظام الملاحة العالمي عبر الأقمار الصناعية (GNSS) ، يُصبح هذا الانحراف عاملًا حاسمًا في نجاح المهمة. التعويض الفعال ليس ميزة إضافية، بل هو أساس نظام الملاحة بالقصور الذاتي الموثوق .
تصنيف أخطاء نظام الملاحة بالقصور الذاتي: ما يمكنك نمذجته مقابل ما لا يمكنك نمذجته
عند العمل مع أنظمة الملاحة بالقصور الذاتي، فإن أول ما أدرسه هو كيفية تغير الأخطاء بمرور الوقت. بعضها يمكن التنبؤ به، والبعض الآخر لا يمكن التنبؤ به. وهذا الاختلاف مهم للغاية عند تحديد التعويض.
الأخطاء المنهجية: يمكن التنبؤ بها وتصحيحها
هذه النتائج قابلة للتكرار عبر الزمن ودرجات الحرارة المختلفة إذا لم يتم تصحيحها:
- الانحراف في الجيروسكوبات ومقاييس التسارع
- اللاخطية في عامل المقياس
- انحرافات طفيفة بين محاور المستشعر
- حساسية حرارية تُغير الناتج تبعًا للبيئة
بفضل إجراءات المعايرة الدقيقة، يمكن عادةً قياس هذه الأخطاء مرة واحدة وتعويضها باستمرار - طالما بقيت ظروفك ضمن الحدود المسموح بها.
الأخطاء العشوائية: غير متوقعة، ولكن يمكن تحديد خصائصها
ثمّة أخطاء لا يمكن إزالتها، بل يمكن فقط نمذجتها. وتشمل هذه الأخطاء ما يلي:
- المشي العشوائي الزاوي (ARW)
- المشي العشوائي بالسرعة (VRW)
- ضوضاء بيضاء من المستشعر
- التشوهات الناتجة عن الاهتزاز، وخاصة في المنصات المتنقلة
الخلاصة: تُحل الأخطاء المنهجية في المختبر، بينما تُحارب الأخطاء العشوائية في الميدان.
كيف تنتشر أخطاء نظام معلومات الملاحة (INS) بمرور الوقت؟
قبل الخوض في موضوع التعويض، من الضروري فهم كيفية عمل الأخطاء داخل نظام الملاحة بالقصور الذاتي. فهي لا تظهر فجأة، بل تتفاقم وتتراكم وتتفاعل مع ديناميكيات النظام بطرق غالباً ما يتم التقليل من شأنها. دعونا نحلل كيفية حدوث ذلك.
الأخطاء الصغيرة لا تبقى صغيرة.
في نظام الملاحة بالقصور الذاتي، حتى أدنى انحراف في الجيروسكوب أو خطأ تسارع بسيط (ميكرو-g) سيتفاقم مع مرور الوقت. ذلك لأن نظام الملاحة بالقصور الذاتي يعمل عن طريق دمج بيانات المستشعرات، مما يعني أن أي خطأ يتراكم في كل خطوة.
التكامل هو عامل مضاعف.
يؤثر الانحراف في الاتجاه على السرعة، ثم يؤثر خطأ السرعة على الموقع. هذا التفاعل المتسلسل هو السبب في أن نظامًا بمواصفات تبدو جيدة على الورق قد ينحرف مئات الأمتار بعد 30 دقيقة من انقطاع إشارة نظام تحديد المواقع العالمي (GNSS).
ملف تعريف الحركة مهم للغاية.
تؤثر طريقة حركة النظام على نوع الأخطاء السائدة. ففي المنصات الثابتة، يطغى الانحياز طويل الأمد والانحراف الحراري. أما في الأنظمة عالية الديناميكية - كالطائرات المسيّرة والصواريخ والمركبات الجوالة السريعة - يصبح عدم الخطية في عامل المقياس والتأخير الزمني أكثر أهمية من الانحياز نفسه.
تُضخّم المهمات الطويلة كل شيء.
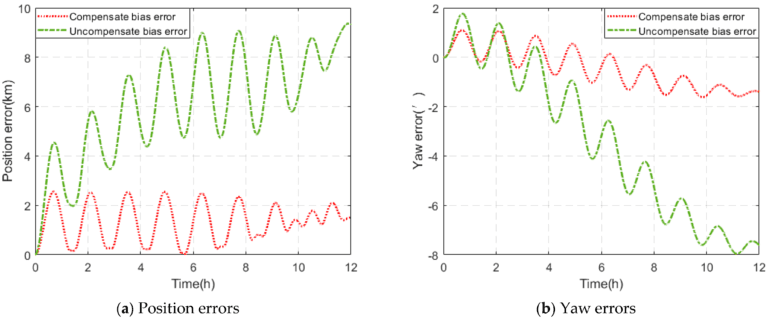
سواء كان الأمر يتعلق بمسار مسح مدته 12 ساعة أو رحلة صاروخية مدتها دقيقتان، فكلما طالت مدة تشغيل نظام الملاحة بالقصور الذاتي الخاص بك دون تصحيح، زادت أهمية نمذجة الأخطاء.
نمذجة أخطاء المستشعرات من أجل التعويض الفعال
قبل أن تتمكن من تصحيح أي شيء في نظام الملاحة بالقصور الذاتي، عليك أن تفهم ما تقوم بتصحيحه. إن انحياز المستشعر وانحرافه وتشويشه ليست عيوبًا، بل هي سلوكيات. وما لم تقم بنمذجتها بشكل صحيح، فإن استراتيجية التعويض الخاصة بك ستكون مجرد تخمين.
أعتمد عادةً على أربع طرق رئيسية للنمذجة. تستهدف كل طريقة منها أنواعًا مختلفة من الأخطاء، ومعًا، فإنها تعطيك صورة واضحة عن كيفية تصرف نظامك - ليس فقط في المختبر، ولكن أيضًا في الميدان.
| أسلوب النمذجة | الغرض الرئيسي | أنواع الأخطاء التي تمت معالجتها | لماذا يهم ذلك |
|---|---|---|---|
| تباين ألان | حلل كيف يتطور تشويش المستشعر بمرور الوقت | ARW، عدم استقرار الانحياز، الانحراف العشوائي | ضروري لضبط المرشحات وتصنيف المستشعرات |
| معايرة بستة أوضاع | تقدير الانحيازات الثابتة وعدم التوافق | الانحياز، عامل المقياس، عدم محاذاة المحور | يُمكّن من إزالة الأخطاء الثابتة بدقة |
| المعايرة الحرارية | تباين مخرجات الخريطة عبر درجات الحرارة | الانحياز الناتج عن درجة الحرارة وانحراف الكسب | أمر بالغ الأهمية للمنصات الخارجية والمتنقلة في العالم الحقيقي |
| تحليل كثافة القدرة الطيفية | فهم ضوضاء المستشعر حسب التردد | ضوضاء بيضاء، تجوال منخفض التردد | يُسهم في تصميم المرشح دون كبح الحركة الحقيقية |
نصيحة: اجمع بين ثلاث من هذه الطرق على الأقل قبل الاعتماد على نظام الملاحة بالقصور الذاتي (INS) في أي مهمة طويلة الأمد أو محرومة من نظام الملاحة العالمي عبر الأقمار الصناعية (GNSS).
تقنيات تخفيف الأخطاء القائمة على الأجهزة
لا يمكن للبرمجيات الجيدة أن تُنقذ الأجهزة المعيبة. في أنظمة الملاحة بالقصور الذاتي، تؤثر خيارات التصميم الميكانيكي والحراري والكهربائي بشكل مباشر على الاستقرار طويل الأمد . هذه هي التقنيات الأساسية التي أعتمد عليها لبناء منصات أنظمة الملاحة بالقصور الذاتي المتينة.
- يُعد عزل الاهتزازات أمراً ضرورياً.
تُنتج الاهتزازات الميكانيكية غير المُفلترة إشارات حركة خاطئة. ويمكن تقليل الضوضاء عالية التردد بشكل كبير باستخدام عوازل مضبوطة أو حوامل مستشعرات مُخمدة بشكل صحيح، خاصة في المركبات المجنزرة أو الطائرات المروحية.
- يضمن التناسق الحراري صحة عملية المعايرة.
يتغير خرج المستشعر بتغير درجة الحرارة. ويمكن للعزل السلبي أو التسخين النشط أن يساعد في الحفاظ على درجة حرارة التشغيل ضمن النطاق الذي قمت بمعايرته.
- يتحول ضجيج الطاقة إلى ضجيج إشارة.
يُسبب تموج الجهد والتداخل الكهرومغناطيسي تشويشًا طفيفًا ومستمرًا للإشارات التناظرية والرقمية. لذا، أحرص دائمًا على استخدام مصادر طاقة نقية، ومنظمات جهد منخفضة الضوضاء، وفصل دقيق بين الإشارات التناظرية والرقمية.
- تؤثر دقة التركيب على المحاذاة.
حتى أدنى انحرافات ميكانيكية قد تؤدي إلى أخطاء كبيرة في تحديد الاتجاه والسرعة. لذا، استخدم دعامات صلبة مصنعة بدقة، وتحكم بعناية في اتجاه وحدة القياس بالقصور الذاتي وعزم الدوران.
- استخدم أجهزة استشعار تتناسب مع المهمة.
لا تكتفِ باختيار "أفضل" مستشعر، بل اختر مستشعرًا يناسب هامش الخطأ المسموح به. في حالات انقطاع نظام تحديد المواقع العالمي (GNSS) لفترات طويلة، يُعدّ استقرار الانحياز هو الأهم. أما في المنصات السريعة، فتُعطى الأولوية لانخفاض معدل الخطأ النسبي (ARW) وعرض النطاق الترددي.
خلاصة القول: يبدأ أفضل أداء بالقصور الذاتي قبل وقت طويل من جمع البيانات - يبدأ الأمر بكيفية تثبيت المستشعر على الإطار.
تقنيات التعويض القائمة على البرمجيات
بمجرد استقرار الأجهزة، يتولى البرنامج زمام الأمور. هنا تتم معظم عمليات التحكم في الانحراف ، وهنا أيضاً يستطيع نموذج جيد أن يجعل أداء مستشعر متواضعاً يُضاهي أداء مستشعر ممتاز. إليكم كيف أتعامل مع هذا الأمر عملياً:
- ابدأ بالمعايرة الصحيحة.
استخدم إجراءات ثابتة وديناميكية لقياس الانحياز، ومعامل المقياس، وعدم المحاذاة، والاستجابة لدرجة الحرارة. فبدون خط أساس معايرة جيد، يصبح كل شيء آخر مجرد تخمين.
- استخدم المرشحات التي تتناسب مع ديناميكياتك.
مرشحات كالمان الموسعة (EKF)، أو مرشحات كالمان غير المعطرة (UKF)، أو المرشحات التكميلية - اختر بناءً على نمط حركتك ومصادر المساعدة المتاحة. إن استخدام بنية مرشح خاطئة أسوأ من عدم استخدام أي مرشح على الإطلاق.
- لا مجال للتفاوض بشأن تعويض درجة الحرارة.
سواء كنت تستخدم مستشعر FOG أو MEMS IMU، فإن سلوك المستشعر يتغير بتغير درجة الحرارة. ويمكن للتصحيح الفوري باستخدام مستشعرات درجة الحرارة الداخلية أو الخارجية أن يقلل الانحراف بمقدار عشرة أضعاف.
- تعمل تقنية الترشيح التكيفي على تحسين فرص البقاء.
في المهام متعددة المراحل (مثل الإطلاق، والتحليق، والهبوط)، تتغير خصائص ضوضاء المستشعرات. يتيح ضبط المرشح التكيفي - بناءً على السرعة أو الاهتزاز أو البيانات البيئية - لنظامك التكيف حسب الحاجة.
- يُبقي التصحيح ذو الحلقة المغلقة الأمور ضمن حدودها.
استخدم تحديثات نظام تحديد المواقع العالمي (GNSS) أو عداد المسافة أو مقياس الضغط الجوي أو مقياس المغناطيسية للحد من نمو الخطأ. حتى التصحيح بمعدل منخفض كل بضع ثوانٍ يحسن الأداء بشكل كبير في المهام طويلة الأمد.
الأهم من ذلك كله: لا يمكن للبرمجيات أن تخترع الدقة، لكنها تستطيع حمايتها ، وتحسينها، واستعادتها عند حدوث أي خلل. وهذا تحديدًا ما يجب أن يفعله نظام الملاحة بالقصور الذاتي الجيد.
دور دمج البيانات الحسية في كبح انحراف نظام الملاحة بالقصور الذاتي
حتى أفضل أنظمة الملاحة بالقصور الذاتي ستتعرض للانحراف - ليس هذا عيبًا، بل هو قانون فيزيائي . السؤال الحقيقي هو كيفية الحد من هذا الانحراف باستخدام مستشعرات أخرى. وهنا تبرز أهمية دمج البيانات الحسية كأداة بالغة الأهمية في النظام.
نظام الملاحة العالمي عبر الأقمار الصناعية + نظام الملاحة بالقصور الذاتي: الحل الكلاسيكي
عندما يكون نظام GNSS متاحًا، حتى بشكل متقطع، فإنه يوفر تحديثات للموقع المطلق للحد من انحراف نظام الملاحة بالقصور الذاتي.
الأفضل لـ: المهام طويلة الأمد، ورسم الخرائط المتنقلة، والطائرات بدون طيار
الميزة: تصحيحات دقيقة، مرشحات متطورة (EKF)
تحذير: عرضة للتشويش، وانقطاع الإشارة، وتعدد المسارات
تقنية هجينة تجمع بين تقنية الضبابية وتقنية الأنظمة الكهروميكانيكية الدقيقة: تحقيق التوازن بين الدقة والتكلفة
إن الجمع بين تقنية FOG المستقرة وتقنية MEMS سريعة الاستجابة يمنحك أفضل ما في العالمين - انحراف منخفض بالإضافة إلى استجابة سريعة.
الأفضل لـ: الطائرات بدون طيار متوسطة الحجم، والمنصات البحرية، والأنظمة الروبوتية
الميزة: أداء أفضل + حجم ووزن واستهلاك طاقة أقل
تنبيه: يتطلب الأمر تكاملاً دقيقاً ومعايرة متبادلة.
الرؤية / LiDAR + INS: استمرارية بدون نظام تحديد المواقع العالمي عبر الأقمار الصناعية
يمكن أن توفر تقنية تحديد الموقع البصري أو تقنية LiDAR SLAM بيانات الوضع النسبي عندما يكون نظام GNSS غير متاح، كما هو الحال في الأماكن المغلقة أو تحت الأرض.
الأفضل لـ: المركبات ذاتية القيادة، والأنفاق، والمستودعات، والمناجم
الميزة: مكتفٍ ذاتيًا تمامًا
ملاحظة: يلزم وجود خط رؤية مباشر، وحساسية للإضاءة أو كثافة العناصر
التوقيت هو كل شيء. لا يعمل نظام Fusion إلا إذا كانت أجهزة الاستشعار متزامنة. عدم تزامن الطوابع الزمنية يسبب ضرراً أكثر من النفع.
من الناحية العملية: لا يتعلق الاندماج بإضافة المزيد من أجهزة الاستشعار، بل يتعلق بمعرفة أي منها يمكن الوثوق به في الوقت المناسب.
نهج GuideNav في موثوقية أنظمة الملاحة بالقصور الذاتي
بعد كل ما رأيته في الميدان - عبر الطائرات بدون طيار، ومركبات المسح، والأنظمة البحرية - هناك شيء واحد يبقى صحيحًا: الأداء الحقيقي لنظام الملاحة بالقصور الذاتي يأتي من كل شيء حول المستشعر .
في GuideNav، هذا هو بالضبط ما نركز عليه.
- كل وحدة تتم معايرتها بالكامل عبر درجات الحرارة والمحاور ، وليس فقط اختبارها على دفعات.
- نحن نقدم بيانات تباين آلان الحقيقية ودعم ضبط المرشحات - وليس مجرد أوراق المواصفات.
- تأتي نماذجنا من نوع FOG و MEMS مزودة بأدوات تكامل جاهزة للاستخدام الميداني : توقيت مستقر، وواجهات نظيفة، ودعم للدمج.
- ولأننا لا نخضع للوائح ITAR ، فإن أنظمتنا جاهزة للنشر العالمي في برامج الدفاع أو الصناعة أو البحث.
أنت لا تحصل على مجرد جهاز استشعار، بل تحصل على منصة ملاحة يمكنك الوثوق بها عندما تتعطل الأنظمة الأخرى.