هل سبق لك أن حاولت دمج نظام ملاحة، لتكتشف لاحقًا أنه لا يوفر أي معلومات عن الموقع على الإطلاق؟
يحدث ذلك عندما يخلط الناس بين وحدة القياس بالقصور الذاتي (IMU) ونظام الملاحة بالقصور الذاتي (INS). قد يبدو الأمر معقدًا، لكن العواقب وخيمة: اختيار أجهزة خاطئة، وهدر للميزانية، وأنظمة لا تعمل كما هو متوقع. ما الحل؟ فهم الفروقات الأساسية بين IMU وINS، ووظيفة كل منهما. سيرشدك هذا الدليل إلى ذلك بأسلوب مبسط وواضح.
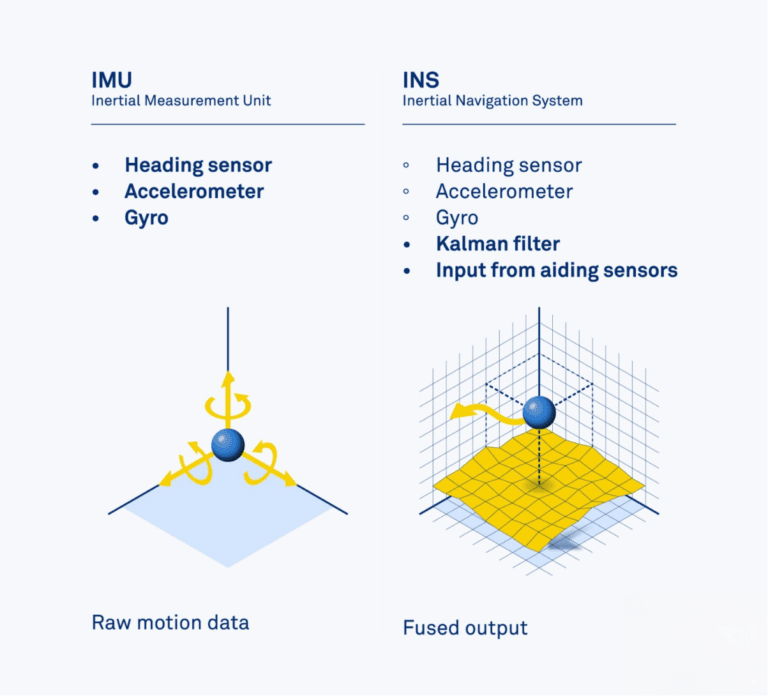
يقيس جهاز IMU الحركة، بينما يستخدم نظام الملاحة بالقصور الذاتي (INS) بيانات IMU لحساب الموقع والاتجاه بمرور الوقت - IMU هو جهاز استشعار، وINS هو نظام.
دعونا نزيل الالتباس - خطوة بخطوة.
جدول المحتويات

ما هو جهاز IMU؟
وحدة القياس بالقصور الذاتي (IMU) هي جهاز استشعار يقيس التسارع والسرعة الزاوية . تُصنع عادةً بتقنيات MEMS أو FOG أو HRG، وتتضمن مقاييس تسارع وجيروسكوبات ، وأحيانًا مقاييس مغناطيسية لا تُوفر هذه الوحدات، بمفردها، معلومات ، إلا عند دمجها مع معالجة إضافية. تتفاوت دقة وحدات القياس بالقصور الذاتي، بدءًا من الأنواع التجارية منخفضة التكلفة وصولًا إلى أجهزة الاستشعار التكتيكية والملاحية مثل GMS400 من GuideNav.

ما هو نظام التأمين الوطني (INS)؟
نظام الملاحة بالقصور الذاتي (INS) هو نظام متكامل يستخدم بيانات وحدة القياس بالقصور الذاتي (IMU) لحساب الموقع والسرعة والاتجاه في الوقت الفعلي. ويتضمن عادةً ما يلي:
- وحدة قياس القصور الذاتي المدمجة
- معالج قوي مدمج
- خوارزميات دمج البيانات الحسية (مثل مرشح كالمان )
- في كثير من الأحيان، تُستخدم وحدة GNSS للمساعدة في
يقوم نظام الملاحة بالقصور الذاتي (INS) بدمج مخرجات وحدة القياس بالقصور الذاتي (IMU) في الوقت الفعلي لتوفير حل ملاحة مستمر. وبفضل ذلك، يمكنه العمل حتى في بيئات تفتقر إلى إشارات نظام الملاحة العالمي عبر الأقمار الصناعية (GNSS) لفترة محدودة، مما يجعله أساسيًا في مهام الفضاء والطيران والملاحة البحرية والمهام ذاتية التشغيل . وتُعد أنظمة مثل GFS120 وGUIDE2D من GuideNav أمثلة على هذا التكامل.
ما الفرق بين وحدات القياس بالقصور الذاتي (IMUs) وأنظمة الملاحة بالقصور الذاتي (INSs)؟
يبسط معظم الناس الأمر بقولهم: "نظام الملاحة بالقصور الذاتي هو مجرد وحدة قياس بالقصور الذاتي مزودة بوحدة GNSS". من الناحية الفنية، هذه بداية - لكنها بعيدة كل البعد عن الصورة الكاملة.
نعم، يتضمن نظام الملاحة بالقصور الذاتي (INS) وحدة قياس بالقصور الذاتي (IMU) في جوهره. ولكنه يدمج أيضًا معالجًا، ونظام تحديد المواقع العالمي عبر الأقمار الصناعية (GNSS) (غالبًا مع دعم RTK أو SBAS)، وأحيانًا مستشعرات مساعدة خارجية مثل مشفرات العجلات، ومستشعرات سرعة الهواء، ومقاييس الارتفاع البارومترية، أو أجهزة قياس سرعة دوبلر (DVL) . تُمكّن هذه الإضافات نظام الملاحة بالقصور الذاتي من دمج البيانات في الوقت الفعلي، مما يوفر ليس فقط بيانات الحركة، بل أيضًا تقديرات عالية الدقة للموقع والسرعة والاتجاه.
يمكن تشبيه وحدة القياس بالقصور الذاتي (IMU) بمقياس حرارة، فهي تعرض البيانات الأولية. أما نظام الملاحة بالقصور الذاتي (INS) فهو بمثابة تقرير الطقس: مُصفّى، ومُدمج، وجاهز للاستخدام.
| ميزة | وحدة القياس بالقصور الذاتي | INS |
|---|---|---|
| الوظيفة الأساسية | يقيس التسارع والدوران | يحسب الموقع الكامل والسرعة والاتجاه |
| عناصر | مقياس التسارع، الجيروسكوب | وحدة قياس القصور الذاتي (IMU) + نظام تحديد المواقع العالمي عبر الأقمار الصناعية (GNSS) + معالج + مستشعرات اختيارية |
| الناتج | بيانات الحركة الخام | بيانات الملاحة المدمجة (في الوقت الفعلي) |
| دعم نظام تحديد المواقع العالمي عبر الأقمار الصناعية (GNSS) | لا أحد | مدمج (RTK/SBAS اختياري) |
| المساعدة الخارجية | غير قابل للتطبيق | عداد المسافات، وعداد سرعة السيارة، وعداد سرعة الهواء، ومقياس الارتفاع، إلخ. |
هل يمكنك الملاحة باستخدام وحدة قياس القصور الذاتي (IMU) فقط؟
تخيّل وحدة قياس القصور الذاتي (IMU) كأنك تشعر بالحركة وعيناك مغمضتان. يمكنك أن تدرك أنك تتحرك للأمام أو تستدير، لكنك لا تعرف أين أنت. هذا ما يحدث عندما تحاول التنقل باستخدام وحدة قياس القصور الذاتي فقط.
بالتأكيد، يمكنك حساب التسارع بمرور الوقت لتقدير الموقع. لكن الأخطاء الصغيرة تتراكم بسرعة، لتتحول إلى أخطاء جسيمة في غضون ثوانٍ. يُسمى هذا الانحراف، وهو ما يجعل وحدات القياس بالقصور الذاتي المستقلة غير موثوقة للملاحة.
إنها رائعة لتحقيق الاستقرار على المدى القصير، مثل الحفاظ على مستوى الكاميرا، ولكنها ليست مناسبة لتحديد موقعك أو وجهتك. لهذا الغرض، أنت بحاجة إلى نظام الملاحة بالقصور الذاتي (INS).
كيف يقوم نظام الملاحة بالقصور الذاتي (INS) بمعالجة بيانات وحدة القياس بالقصور الذاتي (IMU)؟
على عكس وحدة القياس بالقصور الذاتي (IMU) التي تستشعر الحركة فقط، يقوم نظام الملاحة بالقصور الذاتي (INS) بتفسير تلك الحركة وتحويلها إلى معلومات ملاحية شاملة. يشمل ذلك معرفة موقعك وسرعتك والاتجاه الذي تواجهه. لكن هذا لا يحدث تلقائيًا، بل يتطلب سلسلة من الخطوات المصممة بعناية - تجمع بين الفيزياء والرياضيات والتصحيح الفوري - لتحويل الإشارات الخام إلى معلومات ملاحية موثوقة.
دعونا نستعرض العملية:
1. استشعار الحركة (مدخلات وحدة القياس بالقصور الذاتي)
يبدأ كل شيء بوحدة القياس بالقصور الذاتي (IMU)، التي تقيس باستمرار التسارع (عبر مقاييس التسارع) ومعدل الدوران الزاوي (عبر الجيروسكوبات). وتعكس هذه القيم كيفية تحرك النظام في الفضاء ثلاثي الأبعاد.
➡ هذه الخطوة تمنح نظام الملاحة بالقصور الذاتي (INS) إدراكه الخام للحركة.
2. حساب السرعة والموقع
يقوم نظام الملاحة بالقصور الذاتي (INS) بحساب التسارع للحصول على السرعة، ثم يحسب السرعة لتقدير الموقع مع مرور الوقت. وهذا يحدد للنظام المسافة التي قطعها من نقطة انطلاقه.
➡ هكذا يتتبع نظام الملاحة بالقصور الذاتي الحركة - حتى بدون نظام تحديد المواقع العالمي (GPS).
3. تقدير الاتجاه
من خلال معالجة بيانات الجيروسكوب والرجوع إلى متجهات مثل الجاذبية والمجال المغناطيسي للأرض، يحدد نظام الملاحة بالقصور الذاتي الدوران والانحراف والانعطاف - أي اتجاهك ثلاثي الأبعاد بالكامل.
تساعد هذه الخطوة النظام على فهم كيفية دورانه أو إمالته.
4. تطبيق دمج البيانات الحسية لتحقيق الدقة
تتغير بيانات وحدة القياس بالقصور الذاتي (IMU) وحدها بمرور الوقت. يستخدم نظام الملاحة بالقصور الذاتي (INS) خوارزميات ذكية - مثل مرشحات كالمان - لدمج مدخلات وحدة القياس بالقصور الذاتي مع بيانات المستشعرات الأخرى
- GNSS / RTK / SBAS
- عدادات المسافة للعجلات
- أجهزة استشعار سرعة الهواء أو جهاز قياس سرعة المركبة
- مقياس الارتفاع البارومتري
تُحسّن هذه التصحيحات بشكل كبير من الدقة والاستقرار على المدى الطويل.
➡ يحافظ نظام Fusion على موثوقية النظام، حتى عندما تفقد بعض أجهزة الاستشعار الإشارة.
5. تقديم مخرجات الملاحة في الوقت الفعلي
الناتج النهائي عبارة عن تدفق مستمر وفي الوقت الحقيقي لبيانات الموقع والسرعة والاتجاه - يتم تحديثها عدة مرات في الثانية، وهي جاهزة للاستخدام من قبل وحدات التحكم في الطيران أو الطيار الآلي أو أنظمة رسم الخرائط.
➡ هذا ما يجعل نظام الملاحة بالقصور الذاتي حلاً متكاملاً للملاحة.
تتبع منتجات أنظمة الملاحة بالقصور الذاتي من GuideNav هذا التصميم، حيث تتميز بمحركات دمج مُحسّنة للعمل في ظروف انقطاع إشارات نظام الملاحة العالمي عبر الأقمار الصناعية، والبيئات الديناميكية، والمنصات ذات الاهتزازات العالية. والنتيجة: نظام ملاحة موثوق يمكنك الاعتماد عليه في أصعب الظروف.
متى يكون جهاز IMU كافياً لتطبيقك؟
يكفي استخدام وحدة قياس القصور الذاتي (IMU) إذا كان نظامك يحتاج فقط إلى استشعار الحركة ، وليس حساب الموقع أو الاتجاه بمرور الوقت. إنها مثالية عند الاستجابة للحركة، وليس عند محاولة تتبع الموقع بدقة.
تشمل حالات الاستخدام الشائعة ما يلي:
تثبيت الكاميرا
يكشف عن الاهتزاز أو الميل لمساعدة المحركات على إبقاء الكاميرا ثابتة.
تتبع الإيماءات
في الواقع المعزز/الواقع الافتراضي أو الأجهزة القابلة للارتداء، حيث تتبع الحركة - وليس الموقع الدقيق.
التوجه قصير المدى
تُستخدم في الطائرات بدون طيار أو الروبوتات أثناء بدء التشغيل أو التحليق أو المناورات السريعة.
دعم التحكم في الطيران
توفر وحدات القياس بالقصور الذاتي (IMUs)، المقترنة بنظام الملاحة العالمي عبر الأقمار الصناعية (GNSS) أو التدفق البصري، تغذية راجعة سريعة لتحقيق استقرار الطائرة بدون طيار.
ضع في اعتبارك فقط: وحدات القياس بالقصور الذاتي (IMUs) لا توفر سوى التسارع والدوران الخام. إذا كنت بحاجة إلى معلومات عن الاتجاه أو السرعة، فسيتعين عليك حساب ذلك بنفسك - المرشحات، وتصحيح الانحراف، وغير ذلك.
إذا كان ذلك ضمن إمكانيات نظامك، فإن وحدة القياس بالقصور الذاتي (IMU) هي خفيف الوزن وبأسعار معقولة وفعال .
متى تحتاج فعلاً إلى تأمين صحي كامل؟
أنت بحاجة إلى نظام INS كامل عندما يجب أن يعرف نظامك الموقع والاتجاه بدقة في جميع الأوقات - خاصة في البيئات التي قد يفشل فيها نظام GNSS أو يكون غير متاح.
تشمل حالات الاستخدام النموذجية ما يلي:
- البيئات التي لا تتوفر فيها إشارات نظام تحديد المواقع العالمي (GNSS): مثل الأنفاق، والأماكن المغلقة، وتحت الماء، أو الأزقة الحضرية.
- المنصات عالية الديناميكية: مثل الطائرات بدون طيار والصواريخ والمركبات البرية التي تحتاج إلى تحديثات سريعة ودقيقة
- الملاحة التقديرية: حيث يجب على النظام الحفاظ على الملاحة بين إشارات نظام الملاحة العالمي عبر الأقمار الصناعية (GNSS) أو بدون نظام الملاحة العالمي عبر الأقمار الصناعية على الإطلاق
- المهام التي تتطلب دقة عالية: مثل رسم الخرائط، أو تحديد الأهداف، أو القيادة الذاتية
في هذه الحالات، قد ينحرف جهاز القياس بالقصور الذاتي (IMU) وحده بسرعة، مما يؤدي إلى نتائج غير موثوقة. يحل نظام الملاحة بالقصور الذاتي (INS) هذه المشكلة من خلال دمج بيانات القصور الذاتي مع بيانات نظام الملاحة العالمي عبر الأقمار الصناعية (GNSS) وأجهزة استشعار اختيارية مثل مقياس سرعة الطيران (DVL) أو عدادات المسافة أو مقاييس الارتفاع.
ما هي الأخطاء الشائعة في اختيار نظام القياس بالقصور الذاتي (IMU) أو نظام الملاحة بالقصور الذاتي (INS)؟
لنكن صريحين، عندما يتعلق الأمر بأجهزة الاستشعار بالقصور الذاتي، من السهل اتخاذ القرار الخاطئ، خاصةً إذا كنت حديث العهد بهذا المجال. لقد رأيت فرقًا تختار الأداة الخاطئة مرات لا تُحصى. ونادرًا ما يكون السبب هو التكنولوجيا نفسها، بل سوء فهم المشكلة.

وهنا عادةً ما تنحرف الأمور عن مسارها:
الخطأ الأول: الاعتقاد بأن وحدة القياس بالقصور الذاتي (IMU) تحدد موقعك
لا، ليس كذلك. وحدة القياس بالقصور الذاتي (IMU) تخبرك فقط بسرعة حركتك أو دورانك. إذا كنت تأمل في الحصول على إحداثيات فورية مباشرةً، فستصاب بخيبة أمل.
الخطأ الثاني: استخدام وحدة قياس القصور الذاتي (IMU) للمبتدئين في وظيفة تتطلب جهدًا كبيرًا
قد يبدو المستشعر منخفض التكلفة جيدًا على الورق، ولكن بمجرد تثبيته على طائرة بدون طيار أو روبوت سريع الحركة، فإن الضوضاء والانحراف سيدمران بياناتك.
الخطأ الثالث: دفع ثمن نظام الملاحة بالقصور الذاتي (INS) بينما كان من الممكن استخدام وحدة قياس القصور الذاتي (IMU) لتحقيق الغرض
إذا كان كل ما تحتاجه هو تثبيت الكاميرا أو تحديد اتجاهها الأساسي، فإن نظام الملاحة بالقصور الذاتي الكامل يُعدّ مبالغة. لا تُحاول حلّ مشكلة تكلفتها 300 دولار بحلّ تكلفته 3000 دولار.
الخطأ الرابع: نسيان البيئة الواقعية
لا تعكس مواصفات المختبر دائمًا الأداء الميداني. فالاهتزازات العالية، ودرجات الحرارة القصوى، أو أحمال الصدمات قد تؤدي إلى تلف أجهزة الاستشعار الرخيصة بسرعة.
الخطأ رقم 5: التقليل من شأن جهد التكامل
بيانات وحدة القياس بالقصور الذاتي الخام ليست جاهزة للاستخدام الفوري. إذا لم تكن لديك البرامج أو المرشحات أو الخوارزميات المناسبة، حتى أفضل المستشعرات لن تقدم أداءً جيدًا.
ما نوع الدعم الذي يقدمه برنامج GuideNav لاختيار وحدة القياس بالقصور الذاتي/نظام الملاحة بالقصور الذاتي؟
في جايدناف، لا نكتفي بشحن أجهزة الاستشعار فحسب، بل نساعدك في بناء النظام الأمثل . نقدم لكم:
- استشارات فردية حول تقديم الطلبات
- مطابقة أداء وحدة القياس بالقصور الذاتي/نظام الملاحة بالقصور الذاتي
- أدلة تكامل الطائرات بدون طيار والمركبات الأرضية غير المأهولة والأنظمة البحرية
- الوصول إلى ورقة البيانات ومجموعات التقييم
- دعم هندسي سريع الاستجابة
سواء كنت تقوم ببناء طائرة بدون طيار منخفضة الطاقة أو نظام ملاحة محروم من نظام الملاحة العالمي عبر الأقمار الصناعية (GNSS)، فإننا نساعدك في الاختيار بين وحدة قياس القصور الذاتي MEMS أو وحدة قياس القصور الذاتي FOG أو نظام الملاحة بالقصور الذاتي الكامل بناءً على ملف تعريف مهمتك.