لماذا لا تستطيع وحدة القياس بالقصور الذاتي (IMU) قياس الزوايا مباشرة؟
يُحافظ نظام تحديد المواقع العالمي (INS) على ثبات الروبوتات الزراعية عند انقطاع إشارات نظام الملاحة العالمي (GNSS). بفضل ثبات انحياز الجيروسكوب، وانخفاض الانحراف، ودمج المستشعرات باستخدام قياس مسافة العجلات ومحاذاة الجاذبية، تستطيع الجرارات ذاتية القيادة الحفاظ على دقة الصفوف حتى تحت مظلات الأشجار، أو داخل الحظائر، أو بالقرب من الهياكل المعدنية.
التعامل مع انقطاعات نظام الملاحة العالمي عبر الأقمار الصناعية (GNSS) في الروبوتات الزراعية: استراتيجيات تقدير الخطأ من معهد الملاحة الدولي (INS)
يُحافظ نظام تحديد المواقع العالمي (INS) على ثبات الروبوتات الزراعية عند انقطاع إشارات نظام الملاحة العالمي (GNSS). بفضل ثبات انحياز الجيروسكوب، وانخفاض الانحراف، ودمج المستشعرات باستخدام قياس مسافة العجلات ومحاذاة الجاذبية، تستطيع الجرارات ذاتية القيادة الحفاظ على دقة الصفوف حتى تحت مظلات الأشجار، أو داخل الحظائر، أو بالقرب من الهياكل المعدنية.
كيفية التعامل مع انحراف درجة حرارة جيروسكوب IMU؟

يُعدّ انحراف درجة حرارة وحدة القياس بالقصور الذاتي (IMU) سببًا رئيسيًا لتدهور دقة الأنظمة بالقصور الذاتي. من خلال تحسين الأجهزة، والمعايرة الحرارية الكاملة، والتعويض المباشر، يمكن للمهندسين تقليل الانحراف بشكل كبير وضمان أداء مستقر للوضع.
كيف تؤثر الجيروسكوبات ومقاييس التسارع على أداء وحدة قياس القصور الذاتي (IMU)

تعتمد وحدة قياس القصور الذاتي (IMU) المستقرة على دمج بيانات الجيروسكوب ومقياس التسارع. تنحرف الجيروسكوبات، وتُصدر مقاييس التسارع ضوضاء، ويجمع مرشح مكمل بينهما لتوفير تقدير دقيق وخفيف الوزن للاتجاه في الوقت الفعلي.
مقياس التسارع الكوارتزي مقابل مقياس التسارع MEMS

توفر مقاييس التسارع الكوارتزية دقة واستقرارًا فائقين على المدى الطويل، بينما تتميز مقاييس التسارع الكهروميكانيكية الدقيقة (MEMS) بصغر حجمها ومتانتها وفعاليتها من حيث التكلفة. يعتمد الاختيار الأمثل على متطلبات دقة مشروعك وميزانيتك والظروف البيئية المحيطة.
لماذا تحدد ظروف الاختبار المعنى الحقيقي لمواصفات وحدة القياس بالقصور الذاتي (IMU)
تُحدد ظروف اختبار وحدة القياس بالقصور الذاتي (IMU) مدى واقعية وموثوقية مواصفاتها. فدرجة الحرارة والاهتزاز والمدة والترشيح كلها عوامل تُؤثر على ما يُذكر في ورقة البيانات، وما يُقدمه المستشعر فعلياً.
تطبيق وحدة القياس بالقصور الذاتي الكهروميكانيكية الدقيقة (MEMS IMU) في روبوتات فحص خطوط الأنابيب
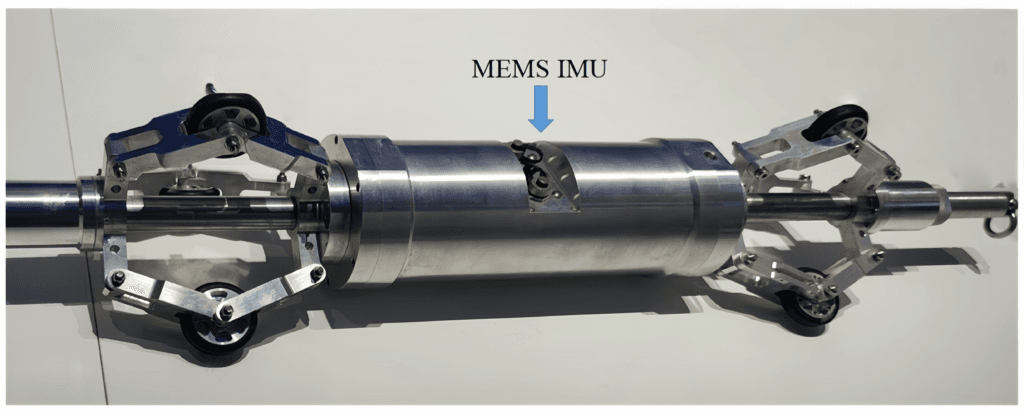
توفر وحدات القياس بالقصور الذاتي بتقنية MEMS نظام ملاحة دقيقًا بالقصور الذاتي لروبوتات فحص خطوط الأنابيب العاملة في بيئات تفتقر إلى نظام الملاحة العالمي عبر الأقمار الصناعية (GNSS). ومن خلال توفير بيانات مستقرة عن الوضع والسرعة والموقع، تضمن هذه الوحدات رسم خرائط موثوقة للعيوب، والتحكم السلس في المسار، والتشغيل المستمر في خطوط الأنابيب المحصورة تحت الأرض أو تحت سطح البحر.
المخاطر الخفية في استخدام وحدات القياس بالقصور الذاتي MEMS عالية الدقة: ما يجب على كل مُكامل معرفته

توفر وحدات القياس بالقصور الذاتي الكهروميكانيكية الدقيقة (MEMS IMUs) أداءً لا مثيل له في استشعار الحركة، ولكن بشرط استخدامها بشكل صحيح. يكشف هذا عن أربعة أخطاء استخدام جوهرية تؤدي غالبًا إلى فقدان الدقة، وكيفية تجنبها عند دمجها في التطبيقات العملية.
مزايا وعيوب وحدة القياس بالقصور الذاتي MEMS من هانيويل HG1930
يُعدّ جهاز Honeywell HG1930 وحدة قياس بالقصور الذاتي (IMU) صغيرة الحجم وعالية الأداء، مصممة للاستخدامات التكتيكية، وتتميز بأداء موثوق وتصميم متين، مما يجعلها مثالية للطائرات بدون طيار والروبوتات وأنظمة الدفاع. يوفر هذا الجهاز دقة ثابتة في البيئات القاسية، ولكنه يأتي بتكلفة أعلى ويخضع لقيود التصدير.
نظرة على تقنية تحديد الموقع القائمة على نظام الملاحة بالقصور الذاتي (INS) المستخدمة في القيادة الذاتية
تحقق المركبات ذاتية القيادة دقة تصل إلى مستوى السنتيمتر من خلال تكامل GNSS/INS ورسم خرائط LiDAR والإدراك البصري، مع وحدات IMU عالية الدقة التي تشكل جوهر تحديد الموقع عند فشل إشارات GPS.