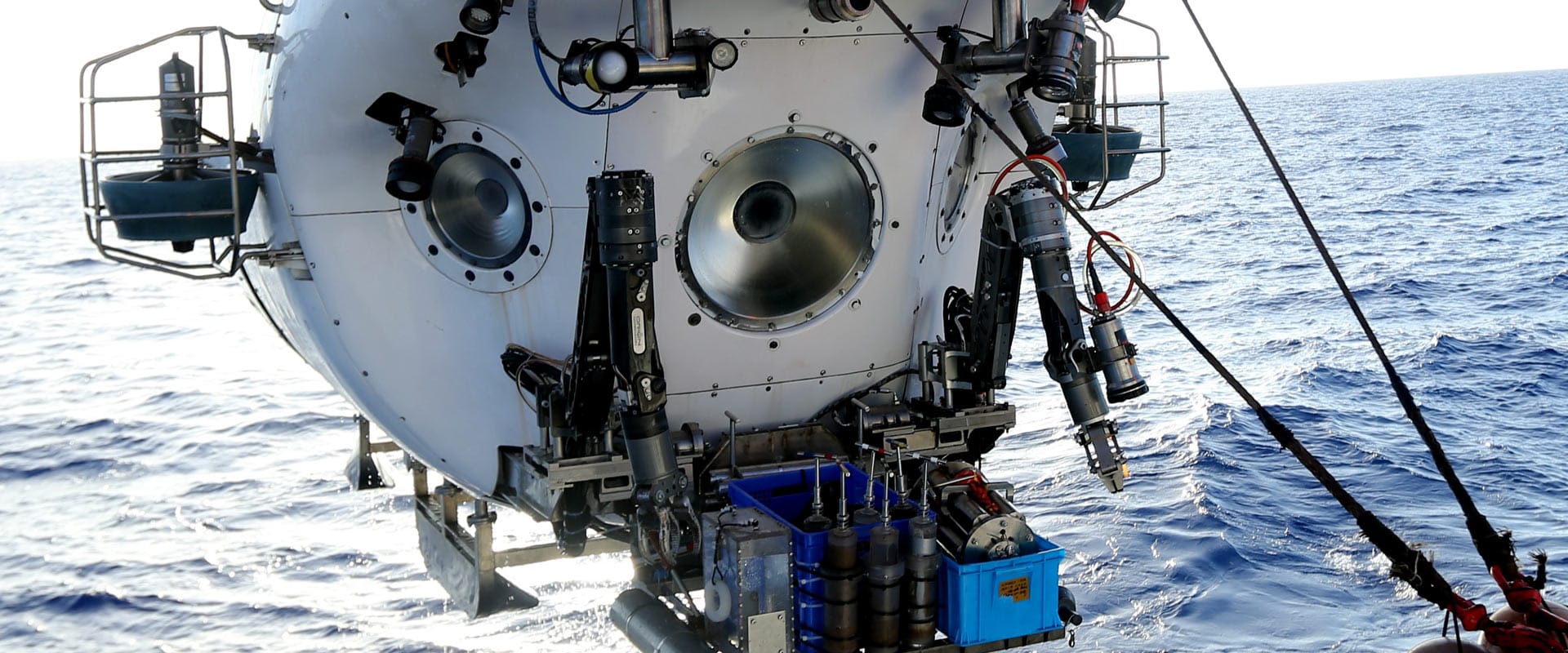
الملاحة تحت الماء عملية دقيقة للغاية. فبدون إشارات نظام تحديد المواقع العالمي (GPS)، تعتمد المركبات تحت الماء كليًا على أجهزة الاستشعار بالقصور الذاتي لتحديد مواقعها. ويمكن أن يتراكم انحراف بسيط في الدقيقة الواحدة ليصل إلى كيلومترات من الخطأ خلال المهمات الطويلة. بالنسبة للمشغلين الذين يقومون برسم خرائط خطوط الأنابيب أو استكشاف المياه العميقة، قد تعني هذه الانحرافات إهدارًا للمهمات، وتكاليف باهظة، ومخاطر على السلامة. ولذلك، يُعدّ الاختيار بين الجيروسكوبات الليفية البصرية (FOG) ووحدات القياس بالقصور الذاتي الكهروميكانيكية الدقيقة (MEMS IMUs) أمرًا بالغ الأهمية.
تحافظ الجيروسكوبات FOG على انحراف منخفض للغاية واستقرار طويل الأمد في ظل ظروف تحت سطح البحر التي تفتقر إلى نظام GNSS، بينما توفر وحدات القياس بالقصور الذاتي MEMS بدائل مدمجة ومنخفضة الطاقة تناسب عمليات الفحص قصيرة المدة والمنصات الحساسة للتكلفة.
لا يدور النقاش بين تقنيتي FOG وMEMS حول أيهما أحدث، بل حول أيهما يصمد فعلاً أمام قسوة الملاحة تحت الماء. بمقارنة أدائهما من حيث الدقة، ومقاومة الظروف البيئية، وتحمل الاهتزازات، والحجم والوزن والطاقة، وعوامل دورة الحياة، نستطيع تحديد نقاط قوة كل تقنية ونقاط ضعفها. يساعد هذا المنظور المنظم المشغلين على اختيار المستشعر المناسب للمهمة المطلوبة تحت الماء.
جدول المحتويات
الدقة والانحراف خلال المهام طويلة الأمد: أي مستشعر يقدم أداءً أفضل؟
أداء FOG
تستغل مستشعرات FOG تأثير ساغناك لقياس السرعة الزاوية، بمعزل عن الأجزاء الميكانيكية. يوفر هذا التصميم معدلات انحراف منخفضة للغاية ، غالبًا أقل من 0.05 درجة/ساعة، مما يجعلها مستقرة للغاية للمهام التي تستغرق من 6 إلى 10 ساعات أو أكثر. في عمليات المسح تحت سطح البحر أو فحص خطوط الأنابيب، تحافظ المركبات الآلية تحت الماء المزودة بمستشعرات FOG على تقديرات موثوقة للاتجاه دون الحاجة إلى تحديثات خارجية مستمرة، مما يضمن دقة المسح وكفاءة المهمة.
أداء الأنظمة الكهروميكانيكية الدقيقة (MEMS)
تقيس الجيروسكوبات الكهروميكانيكية الدقيقة (MEMS) الدوران عبر الهياكل المهتزة. ورغم التحسينات، لا يزال عدم استقرارها يتراوح بين 1 و10 درجات/ساعة ، مما يؤدي إلى أخطاء تراكمية كبيرة في البيئات التي تفتقر إلى نظام الملاحة العالمي عبر الأقمار الصناعية (GNSS). تستطيع وحدات MEMS إدارة عمليات غطس قصيرة أو مهام فحص تستغرق أقل من ساعة، ولكن على المدى الطويل، يتطلب تراكم الانحراف تصحيحًا متكررًا باستخدام أجهزة قياس سرعة الدوران (DVLs) أو أجهزة تحديد المواقع تحت الماء (USBLs) أو المنارات الصوتية. هذا الاعتماد يحد من الاستقلالية في عمليات أعماق البحار.
مقارنة
FOG : استقرار لا مثيل له، مناسب للمسح طويل الأمد.
أنظمة MEMS : مناسبة فقط للمهام قصيرة المدى والمحدودة زمنياً.
الخلاصة : يُعدّ نظام FOG الخيار الأفضل عندما تكون الدقة مع مرور الوقت أمراً بالغ الأهمية للمهمة.
المتانة البيئية: ما هي التقنية التي تتحمل الضغط ودرجات الحرارة القصوى تحت سطح البحر؟
متانة الدهون والزيوت والشحوم
تستخدم أجهزة قياس الاهتزازات الضوئية (FOGs) ملفات ضوئية وإلكترونيات الحالة الصلبة، مما يجعلها مقاومة بطبيعتها للضغط والملوحة والتغيرات الحرارية الواسعة . ولأنها لا تحتوي على هياكل مهتزة، فإن الضغط في الأعماق له تأثير ضئيل على الأداء. ويمكن التنبؤ بانحراف درجة الحرارة وتعويضه في المصنع، مما يضمن دقة ثابتة في تحديد الاتجاه حتى في المياه القطبية أو الاستوائية.
متانة الأنظمة الكهروميكانيكية الدقيقة
تُبنى مستشعرات الأنظمة الكهروميكانيكية الدقيقة (MEMS) على هياكل دقيقة من السيليكون، وهي حساسة للتمدد الحراري والإجهاد وتقلبات الضغط . ويمكن أن تؤدي ظروف قاع البحر - وخاصة التغيرات السريعة في درجات الحرارة أو ارتفاع الملوحة - إلى تدهور استقرار انحيازها وخطية عامل المقياس. تساعد خوارزميات التعويض والتغليف، ولكن تتطلب أنظمة MEMS عمومًا إعادة معايرة فعّالة عند تغير الظروف البيئية.
مقارنة
FOG : أكثر متانة في التعرض طويل الأمد للبيئات تحت سطح البحر.
الأنظمة الكهروميكانيكية الدقيقة (MEMS) : حساسة للإجهاد البيئي، وتتطلب تصحيحًا متكررًا.
الخلاصة : لا تزال تقنية FOG الخيار الموثوق به لمهام أعماق البحار، بينما تناسب تقنية MEMS البيئات الضحلة أو الخاضعة للتحكم.

الاهتزاز والصدمات: أي مستشعر يحافظ على الاستقرار تحت الأحمال الديناميكية؟
استقرار الدهون والزيوت والشحوم
تتميز الجيروسكوبات الليفية المغناطيسية (FOG)، الخالية من الأجزاء الميكانيكية المتحركة، بحساسية أقل للأخطاء الناتجة عن الاهتزازات. في المنصات تحت سطح البحر، مثل المركبات الآلية تحت الماء (AUVs) العاملة بالقرب من تيارات قاع البحر أو المركبات الموجهة عن بُعد (ROVs) التي تتعامل مع الأدوات، تحافظ هذه الجيروسكوبات على قراءات مستقرة حتى في ظل الاهتزازات الدقيقة المستمرة أو الصدمات المفاجئة. يضمن تصميمها البصري أن يكون للأحمال الديناميكية تأثير ضئيل على الانحياز ومعامل المقياس، ولذلك تُستخدم هذه الجيروسكوبات على نطاق واسع في أنظمة مكافحة الألغام البحرية وفي الإنشاءات البحرية.
استقرار الأنظمة الكهروميكانيكية الدقيقة
على الرغم من بنيتها الدقيقة والمتينة، فإن مستشعرات الأنظمة الكهروميكانيكية الدقيقة (MEMS) أكثر عرضةً للضوضاء الناتجة عن الاهتزازات والصدمات . إذ يمكن للهياكل المهتزة التقاط ترددات غير مرغوب فيها، مما يؤدي إلى قراءات خاطئة لمعدل الدوران الزاوي أو عدم استقرار مؤقت في المخرجات. وبينما تُحسّن تقنيات التخميد والترشيح الأداء، غالبًا ما تتطلب جيروسكوبات MEMS معالجة إشارة مكثفة لضمان استمرارية عملها في بيئات عالية الاهتزاز، مثل الطائرات المسيّرة تحت الماء التي تعمل بمحركات الدفع.
مقارنة
- FOG : يوفر قراءات مستقرة في ظل الاهتزاز والصدمات المفاجئة، مما يقلل من انتشار الخطأ.
- أنظمة MEMS : خفيفة الوزن ولكنها عرضة للضوضاء الناتجة عن الاهتزاز، مما يتطلب ترشيحًا مكثفًا.
- الخلاصة : بالنسبة للمنصات المعرضة للاضطرابات أو الاهتزازات الناتجة عن المراوح أو عمليات الأدوات تحت سطح البحر، فإن نظام FOG يوفر بوضوح الحل الأكثر استقرارًا ومقاومة للمهمة.
الحجم والوزن والطاقة: أي مستشعر يناسب المنصات ذات القيود المتعلقة بالحجم والوزن والطاقة؟
خصائص FOG SWaP
تأتي مستشعرات FOG تقليديًا بملفات بصرية أكبر حجمًا ومتطلبات طاقة أعلى . حتى مع التطورات الحديثة في مجال التصغير، قد يزن مستشعر FOG التكتيكي عدة مئات من الغرامات ويستهلك عدة واط من الطاقة. في المركبات الآلية تحت الماء الصغيرة أو المركبات الموجهة عن بُعد ذات البطاريات المحدودة، قد يؤدي ذلك إلى تقليل مدة التشغيل أو سعة الحمولة. مع ذلك، بالنسبة للمركبات تحت الماء متوسطة إلى كبيرة الحجم، غالبًا ما يكون التنازل عن الحجم والطاقة مبررًا بالدقة والاستقرار الفائقين.
خصائص أنظمة MEMS من حيث الحجم والوزن والطاقة
تتميز وحدات القياس بالقصور الذاتي بتقنية MEMS بصغر حجمها وخفة وزنها وكفاءتها العالية في استهلاك الطاقة . يزن العديد من وحدات MEMS التكتيكية أقل من 50 غرامًا وتعمل بأقل من 1 واط. وهذا يجعلها مثالية لطائرات الاستطلاع الصغيرة بدون طيار، ووحدات الملاحة المحمولة للغواصين، أو الحمولات التي يُحسب فيها كل غرام وكل مللي أمبير. كما يسمح حجمها الصغير بدمجها في حاويات ضيقة، مما يتيح تصميمات مركبات مرنة.
مقارنة
- FOG : أكبر حجماً وأكثر استهلاكاً للطاقة، وهو الأنسب للمنصات ذات المساحة الكافية وميزانيات الطاقة.
- أنظمة MEMS : مُحسَّنة للأنظمة ذات القيود المتعلقة بالحجم والوزن والطاقة، مما يتيح تصميمات خفيفة الوزن ومنخفضة الطاقة.
- الخلاصة : عندما تكون الكفاءة والحجم الصغير من أهم الأولويات، فإن نظام MEMS هو الخيار الطبيعي؛ أما بالنسبة للمهام التي تعطي الأولوية للدقة على حساب القدرة على التحمل، فإن نظام FOG يظل هو المعيار.

التكامل مع أجهزة المساعدة تحت سطح البحر: ما هو المستشعر الذي يعمل بشكل أفضل مع DVL و USBL؟
تكامل FOG
توفر الجيروسكوبات الليفية (FOG) مرجعًا عالي الاستقرار يُحسّن بشكل كبير أداء أجهزة قياس سرعة دوبلر (DVLs) وأنظمة الصوت ذات الخط الأساسي القصير جدًا (USBL) والخط الأساسي الطويل (LBL). ولأن مخرجات الجيروسكوبات الليفية تظل دقيقة مع مرور الوقت، يمكن لأجهزة الاستشعار المساعدة تحديث بياناتها بوتيرة أقل، مما يقلل من أخطاء الملاحة حتى في حال انقطاع الإشارات الصوتية أو حجبها جزئيًا. هذا التكامل يجعل حلول أنظمة الملاحة بالقصور الذاتي (INS) القائمة على الجيروسكوبات الليفية المعيار الأمثل للمركبات الآلية تحت الماء (AUVs) المستخدمة في المسح البحري ومهام الغوص طويلة الأمد.
تكامل الأنظمة الكهروميكانيكية الدقيقة
تعتمد وحدات القياس بالقصور الذاتي (IMU) المصنعة بتقنية MEMS بشكل أكبر على مصادر خارجية نظرًا لارتفاع معدل الانحراف وعدم استقرار الانحياز فيها . ورغم سهولة دمجها مع أجهزة تحديد المواقع الديناميكية (DVL) وأجهزة تحديد المواقع تحت الماء (USBL) بفضل تصميمها الخفيف الوزن والمتوافق مع الأنظمة الرقمية، إلا أن الحاجة المتكررة للتصحيحات تزيد من اعتماد النظام على التحديثات الصوتية. في البيئات الصاخبة أو ذات الإشارة الضعيفة، قد يُظهر نظام الملاحة القائم على تقنية MEMS قفزات أو انخفاضًا في جودة تحديد المواقع ما لم يتم تعزيزه بخوارزميات متقدمة لدمج البيانات الحسية.
مقارنة
- FOG : يوفر بنية أساسية مستقرة لأنظمة المساعدة تحت سطح البحر، مما يقلل الاعتماد على التصحيحات المتكررة.
- أنظمة MEMS : سهلة الدمج ولكنها تتطلب تحديثات خارجية مستمرة للتعويض عن الانحراف.
- الخلاصة : بالنسبة للمهام التي قد تكون فيها التحديثات الصوتية غير موثوقة، فإن تقنية FOG هي الخيار الأكثر أمانًا؛ ويمكن أن تكون تقنية MEMS كافية عندما يكون الدعم الخارجي مضمونًا ومتكررًا.
من استقرار الانجراف إلى المرونة البيئية، وتحمل الاهتزازات، و SWaP، وتكامل النظام، توضح المقارنة حتى الآن أن FOG يتفوق بشكل عام على MEMS في ظروف تحت سطح البحر الصعبة، في حين تظل MEMS خيارًا عمليًا للمهام الأخف والأقصر.
مع ذلك، لا يُعدّ الأداء وحده معيارًا كافيًا لتحديد الحل الأمثل. فالتكلفة، ومتطلبات الصيانة، وجودة البيانات، والتطبيقات المُثبتة، كلها عوامل حاسمة عند اختيار جهاز استشعار لمنصات تحت سطح البحر. في الجزء الثاني، سنواصل هذا الاستكشاف من خلال دراسة اقتصاديات دورة الحياة، والصيانة، وموثوقية رسم الخرائط، وحالات الاستخدام الواقعية، قبل الوصول إلى قرار نهائي بشأن التقنية الأنسب للاستخدام تحت الماء.
