يُعدّ انحراف درجة حرارة وحدة قياس القصور الذاتي (IMU) مصدرًا مستمرًا لخطأ الجيروسكوب: فمع تغير درجة الحرارة، يتغير انحياز الجيروسكوب، ويبدو أن الوحدة الثابتة تدور. ولأن هذا الانحراف يتكامل مع مرور الوقت، فإن حتى الانحياز الطفيف قد يتطور إلى خطأ كبير في الاتجاه أو التوجيه في الطائرات بدون طيار، والمركبات الموجهة آليًا، والروبوتات، والمنصات المستقرة. الحل الفعال منهجي: تقليل انحراف درجة حرارة وحدة قياس القصور الذاتي من خلال تصميم الأجهزة، وتوصيفه عبر درجة الحرارة أثناء المعايرة، وتعويضه إلكترونيًا في الوقت الفعلي.
يُعدّ انحراف درجة حرارة وحدة القياس بالقصور الذاتي (IMU) سببًا رئيسيًا لتدهور دقة الأنظمة بالقصور الذاتي. من خلال تحسين الأجهزة، والمعايرة الحرارية الكاملة، والتعويض المباشر، يمكن للمهندسين تقليل الانحراف بشكل كبير وضمان أداء مستقر للوضع.
ينشأ انحراف درجة حرارة وحدة القياس بالقصور الذاتي (IMU) من السلوك الفيزيائي لكلٍّ من أجهزة MEMS وFOG. مع تغير درجة الحرارة، يتغير انحياز المستشعر، وإذا لم يُصحَّح، يتراكم هذا الانحراف مُسببًا أخطاءً طويلة المدى في الاتجاه. تتطلب إدارة انحراف درجة حرارة وحدة القياس بالقصور الذاتي فهم كيفية تأثير درجة الحرارة على المستشعر، وتوصيف انحرافه من خلال المعايرة، وتطبيق تعويض آني. عند دعمه بتصميم أجهزة مناسب، وترشيح، ودمج المستشعرات، يصبح هذا الانحراف قابلًا للتنبؤ به والتحكم فيه بالكامل.
جدول المحتويات
فهم انحراف درجة حرارة الجيروسكوب
قبل استكشاف كيفية التخفيف من انحراف درجة حرارة وحدة القياس بالقصور الذاتي (IMU)، من المهم فهم ماهية هذه الظاهرة. انحراف درجة الحرارة ليس ضوضاء عشوائية، بل هو تغير منهجي في الانحراف مع تغير درجة الحرارة الداخلية للمستشعر. ولأن هذا الانحراف مُدمج في تقدير الوضع، فقد يتراكم انحراف درجة حرارة وحدة القياس بالقصور الذاتي (IMU) مسببًا أخطاء كبيرة في الاتجاه أو التوجيه أثناء التشغيل المطول.
مخرجات الجيروسكوب هي:
معدل الزاوية المقاس = المعدل الحقيقي + التحيز + الضوضاء
يشير انجراف درجة حرارة IMU إلى تغير مصطلح التحيز مع تغير درجة الحرارة ، وتختلف هذه الآلية بالنسبة لأجهزة الجيروسكوب MEMS وFOG.
جيروسكوب ممس
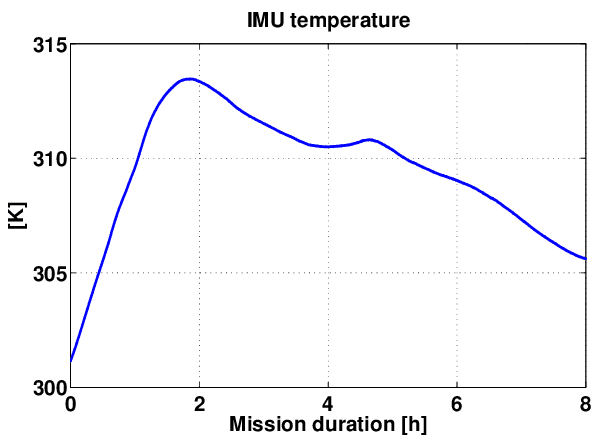
ينشأ انحراف درجة الحرارة في وحدات القياس بالقصور الذاتي (IMU) المستندة إلى الأنظمة الكهروميكانيكية الصغرى (MEMS) من تغيرات معامل المرونة، وتحولات التردد الرنيني، واختلافات التخميد، وانحراف كسب ASIC، وإجهاد التغليف. غالبًا ما تُسبب هذه التأثيرات انحرافًا كبيرًا أثناء التسخين أو تحولات انحياز أثناء التحولات السريعة في درجات الحرارة.
جيروسكوبات الضباب
تُظهر أجهزة FOG انحرافًا حراريًا أقل لوحدة قياس القصور الذاتي (IMU)، ولكنها لا تزال تتأثر بتغيرات الطور البصري، وتحولات الطول الموجي في مصدر الضوء، وتمدد ملف الألياف، والإجهاد الحراري. ورغم أن انحرافها أكثر سلاسة، إلا أنه لا يزال يتعين نمذجته وتعويضه.
لماذا يصبح الانجراف خطأً خطيرًا في الموقف
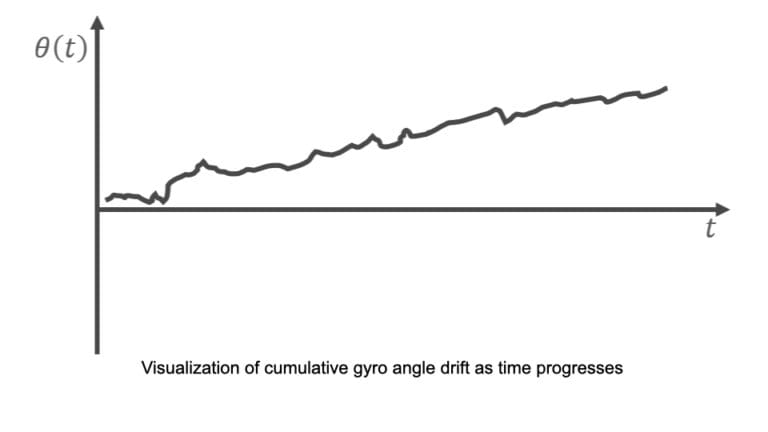
مع أن انجراف درجة الحرارة قد يبدو ضئيلاً لحظة حدوثه، إلا أن تأثيره يصبح شديداً بمجرد دخوله في عملية تقدير الاتجاه. تقيس الجيروسكوبات المعدل الزاوي، ويتم تحديد الاتجاه بدمج هذا المعدل مع مرور الوقت. أي انحراف غير مصحح - مهما كان صغيراً - يستمر في التراكم، مما يُنتج أخطاء متزايدة في التدحرج والميل، وخاصةً في الاتجاه أثناء التشغيل طويل الأمد.
يتم دمج تحيز الجيروسكوب بمرور الوقت:
خطأ الموقف ≈ ∫ التحيز × الوقت
لهذا السبب، قد يُسبب انحياز طفيف، مثل ٠.٠١ درجة/ثانية، عدة درجات من خطأ التوجيه خلال دقائق. كلما طالت مدة المهمة وقلّت المراجع الخارجية المتاحة، زاد تأثير انحراف درجة الحرارة على دقة الملاحة الإجمالية.
ثلاث طرق هندسية أساسية للتخفيف من انجراف درجات الحرارة
يتطلب تخفيف انحراف درجة حرارة الجيروسكوب نهجًا هندسيًا متعدد الطبقات يعالج المشكلة من جذورها، ويُنمذجها في ظروف مُتحكم بها، ويُصحّحها باستمرار أثناء التشغيل. يطبق المهندسون عادةً ثلاث طرق مُتكاملة : تحسين الأجهزة، والمعايرة الحرارية غير المتصلة بالإنترنت، والتعويض الفوري عبر الإنترنت.
(1) تحسين الأجهزة: تقليل الانحراف عند المصدر
تؤثر التحسينات على مستوى الأجهزة بشكل كبير على استقرار الجيروسكوب. تشمل الاستراتيجيات الفعالة اختيار مستشعرات ذات معامل حرارة منخفض، واستخدام مواد هيكلية مستقرة حراريًا، والحفاظ على تصميمات متناسقة، وإدارة تدفق الحرارة الداخلي. كما يمكن لوحدات القياس بالقصور الذاتي (IMUs) عالية الجودة دمج سخان أو وحدة تحكم حراري للحفاظ على درجة حرارة تشغيل مستقرة للمستشعر، مما يقلل من الانحراف الداخلي.
(2) معايرة درجة الحرارة دون اتصال بالإنترنت: بناء نموذج التحيز-درجة الحرارة
أثناء التصنيع، تُوضع وحدة القياس بالقصور الذاتي (IMU) في حجرة درجة حرارة، وتُمسح على كامل نطاق تشغيلها (مثلاً، من -40 درجة مئوية إلى +85 درجة مئوية). تُسجل قيم الانحياز عند كل درجة حرارة، ثم تُدمج في نموذج تعويض - خطي، أو متعدد الحدود، أو مجزأ. تُخزن معاملات النموذج في البرنامج الثابت، وتُشكل أساسًا للتصحيح الدقيق في الوقت الفعلي.
(3) التعويض عبر الإنترنت: تصحيح الانحراف في الوقت الفعلي
مع إنشاء نموذج تحيز-درجة حرارة، تُعوّض وحدة القياس بالقصور الذاتي (IMU) الانحراف أثناء التشغيل. يُوفّر مستشعر درجة حرارة بالقرب من قلب الجيروسكوب قراءات فورية لدرجة الحرارة، ويحسب البرنامج الثابت الانحراف المتوقع باستخدام النموذج، ويُطرح هذا الانحراف من القياسات الأولية. يُعاكس هذا الانحراف الناتج عن سلوك الإحماء، والسخونة الداخلية، وتغيرات درجة الحرارة المحيطة.

ما وراء التعويض: المرشحات ودمج المستشعرات لتحقيق الاستقرار على المدى الطويل
حتى مع تصميم الأجهزة القوي، والمعايرة الدقيقة، والتعويض الفوري، سيبقى الانحراف المتبقي الصغير موجودًا دائمًا. مع فترات التشغيل الطويلة، يمكن أن تتراكم هذه الأخطاء المتبقية، لذا تُضيف الأنظمة عالية الأداء ترشيحًا ودمجًا للمستشعرات لضمان الاستقرار.
تقنيات التصفية
تُثبّت مرشحات الترددات المنخفضة أو التكيفية تقديرات الانحياز وتُخفّف من انتقالات درجة الحرارة المشوشة. تسمح أساليب الكشف الثابتة للنظام بتحديث تقديرات الانحياز كلما كانت وحدة القياس بالقصور الذاتي (IMU) ثابتة، مما يُحسّن الاستقرار على المدى الطويل.
استشعار الانصهار
تُدخل خوارزميات الاندماج مراجع خارجية لكبح الانجراف المتراكم. تشمل مصادر المساعدة النموذجية مقاييس التسارع لتصحيح الميلان/الانقلاب بالاعتماد على الجاذبية، ومقاييس المغناطيسية أو نظام الملاحة العالمي عبر الأقمار الصناعية (GNSS) لتثبيت الاتجاه، وقياس المسافات، والرؤية، أو الليدار للملاحة طويلة المدى. يُرسي الاندماج القائم على EKF/UKF النظام على مراجع مطلقة، مما يمنع الانجراف الناتج عن درجة الحرارة من الهيمنة على الأداء.

اختيار وحدة قياس القصور الذاتي (IMU) المناسبة: الأنظمة الكهروميكانيكية الصغرى (MEMS) مقابل الأنظمة الضبابية (FOG)
يُعد اختيار وحدة قياس القصور الذاتي (IMU) المناسبة مبكرًا من أكثر الطرق فعالية لتجنب قيود انحراف درجة الحرارة لاحقًا. تُعد وحدات قياس القصور الذاتي (IMUs) من MEMS مثالية عندما تكون الأولوية للحجم الصغير، وانخفاض الطاقة، والكفاءة من حيث التكلفة، وعند توفر المساعدة الخارجية. وهي تعمل بكفاءة لفترات المهام القصيرة إلى المتوسطة وفي ظروف بيئية معتدلة.
وحدات قياس القصور الذاتي FOG هي الخيار الأمثل عند توقع استقرار طويل الأمد، أو دقة عالية في التوجيه، أو تقلبات كبيرة في درجات الحرارة. وهي مُفضّلة للمهام التي لا تعتمد على نظام الملاحة العالمي عبر الأقمار الصناعية (GNSS) أو أي تصحيحات خارجية أخرى.
دليل بسيط:
- إذا كان نظامك يعتمد على الاندماج ويحتاج إلى SWaP منخفض → اختر MEMS.
- إذا كان نظامك لا يتحمل الانجراف المتراكم → اختر FOG.

بناء نظام مستقر باستخدام GuideNav IMU الصحيح
يصبح انحراف درجة حرارة وحدة قياس القصور الذاتي (IMU) قابلاً للإدارة عند معالجته من خلال هندسة مناسبة: تحسين الأجهزة، ومعايرة درجة الحرارة، والتعويض الفوري، والترشيح، ودمج المستشعرات. بفضل هذه الإجراءات، يمكن للطائرات بدون طيار، والمركبات الموجهة آلياً، والروبوتات، وأنظمة الدفاع الحفاظ على أداء مستقر حتى في ظل الظروف الحرارية القاسية.
توفر GuideNav وحدات قياس بالقصور الذاتي (IMUs) مصممة بثبات حراري قوي، وسير عمل معايرة مصمم بعناية، وخوارزميات تعويض موثوقة. يضمن اختيار وحدة قياس بالقصور الذاتي (IMUs) من GuideNav، التي تناسب بيئة التشغيل واحتياجات الدقة لديك، أن يبدأ نظامك بأساس حراري متين، مما يقلل من انحراف درجة حرارة وحدة القياس ويعزز موثوقيتها على المدى الطويل.
