يصعب فحص خطوط الأنابيب تحت الأرض وتحت سطح البحر نظرًا لاختفاء إشارات نظام تحديد المواقع العالمي (GPS) والضوء والمراجع المغناطيسية داخلها. تفقد أجهزة الاستشعار التقليدية، مثل الكاميرات وأجهزة التشفير، دقتها على الأسطح الزلقة أو المنحنية، مما يجعل تحديد موقع العيوب غير موثوق. في مثل هذه البيئات التي لا تدعم نظام الملاحة العالمي عبر الأقمار الصناعية (GNSS)، وحدات القياس بالقصور الذاتي (IMUs) من MEMS حلاً ملاحيًا متكاملاً. بفضل تصميمها المدمج، وانخفاض استهلاكها للطاقة، ومقاومتها للاهتزاز، تُمكّن هذه المستشعرات بالقصور الذاتي، القائمة على MEMS، روبوتات فحص خطوط الأنابيب من الحفاظ على اتجاه ثابت، وقياس الحركة بدقة، ورسم خريطة للعيوب بدقة - حتى على عمق مئات الأمتار تحت السطح.
توفر وحدات القياس بالقصور الذاتي (IMUs) من MEMS ملاحة دقيقة بالقصور الذاتي لروبوتات فحص خطوط الأنابيب العاملة في بيئات لا تدعم نظام GNSS. ومن خلال توفير بيانات ثابتة عن الوضع والسرعة والموقع، تضمن هذه الوحدات رسم خرائط موثوقًا للعيوب، وتحكمًا سلسًا في المسار، واستمرارية التشغيل في خطوط الأنابيب المحصورة تحت الأرض أو تحت سطح البحر.
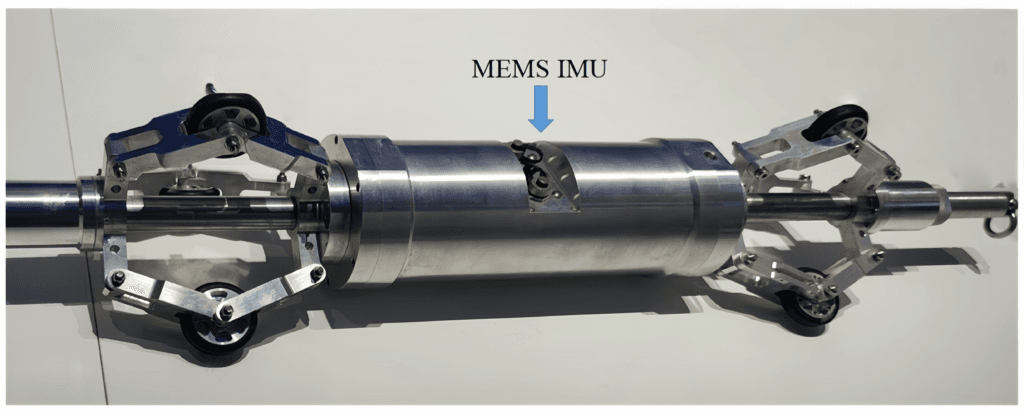
داخل خط الأنابيب، حيث تختفي إشارات نظام الملاحة العالمي عبر الأقمار الصناعية (GNSS) والإشارات البصرية، تعتمد الملاحة كليًا على وحدات قياس القصور الذاتي (IMUs) من MEMS. تلتقط هذه المستشعرات بالقصور الذاتي المدمجة معدل السرعة الزاوية والتسارع لبناء مسار حركة مستمر. بالنسبة لروبوت فحص خطوط الأنابيب، تعني الملاحة بالقصور الذاتي الدقيقة معرفة موقعه واتجاهه وسرعته بدقة، وهو ما يُمثل أساسًا للكشف عن العيوب ورسم خرائطها بدقة.
جدول المحتويات
تحدي الملاحة داخل خطوط الأنابيب المحرومة من نظام الملاحة العالمي عبر الأقمار الصناعية
بالنسبة لروبوت فحص خطوط الأنابيب ، يُعدّ الملاحة التحدي الأصعب. ففي أعماق الأنابيب المعدنية، تُحجب إشارات نظام الملاحة العالمي عبر الأقمار الصناعية (GNSS) ، حتى أن المستشعرات المغناطيسية تفقد موثوقيتها. الطريقة الوحيدة للحفاظ على دقة تتبع الحركة هي من خلال الملاحة بالقصور الذاتي التي تعمل بواسطة وحدة قياس (IMU) من MEMS . من خلال القياس المستمر للمعدل الزاوي والتسارع الخطي، تساعد وحدة قياس بالقصور الذاتي الروبوت على حساب اتجاهه وسرعته وموقعه في الوقت الفعلي. قد يُسبب أي عدم استقرار في التحيز أو انحراف في التكامل أخطاءً كبيرة في رسم الخرائط، ولهذا السبب تُعد (IMU) عالية الأداء من GuideNav MEMS ضرورية للفحص الدقيق تحت الأرض في البيئات التي لا تدعم نظام الملاحة العالمي عبر الأقمار الصناعية (GNSS) .

لماذا تتناسب تقنية MEMS IMU مع روبوتات فحص الأنابيب بشكل مثالي
مُدمج. قوي. دقيق.
داخل خط أنابيب فولاذي ضيق، كل مليمتر وكل واط له أهمية.
وهنا حيث وحدة قياس القصور الذاتي MEMS لا يمكن الاستغناء عنها.
- صغير الحجم وخفيف الوزن: روبوتات فحص خطوط الأنابيب ذات القطر الصغير حيث تكون المساحة محدودة.
- طاقة منخفضة وكفاءة: تدعم المهام طويلة الأمد دون زيادة تحميل أنظمة الطاقة.
- مقاوم للاهتزاز: الملاحة بالقصور الذاتي المستقرة حتى في ظل اهتزاز 20 جرامًا من الجذر التربيعي المتوسط.
- مقاوم لدرجة الحرارة: يعمل بشكل موثوق به في درجات حرارة تتراوح من -40 درجة مئوية إلى +85 درجة مئوية.
على عكس وحدات FOG الضخمة، نظام القصور الذاتي القائم على MEMS بيانات حركة عالية الدقة في عامل شكل مصغر - مثالي للبيئات تحت الأرض التي لا تتوفر فيها تقنية GNSS .
من بيانات الحركة الخام إلى رسم الخرائط الدقيقة للموضع
في خط الأنابيب الذي لا يدعم GNSS يجب قياس كل حركة يقوم بها روبوت فحص خط الأنابيب
جهاز MEMS IMU بتحويل إشارات الحركة الخام إلى ملاحة بالقصور الذاتي من خلال سير عمل حسابي دقيق:
الخطوة 1 استشعار الحركة
جيروسكوبات MEMS عالية الجودة السرعة الزاوية بينما مقاييس التسارع MEMS التسارع الخطي.
ويشكلان معًا أساس مرجع الحركة الداخلية للروبوت.
الخطوة 2 التكامل والحساب
القصور الذاتي لتقدير الموقف والسرعة والموقع في الوقت الفعلي.
هذا هو جوهر الملاحة الحسابية ، والذي يسمح بالتتبع المستمر حتى بدون نظام تحديد المواقع العالمي (GPS).
الخطوة 3 تحديد موقع العيب
عندما تحدد الكاميرات أو المجسات بالموجات فوق الصوتية التآكل أو الشقوق، وحدة IMU MEMS من GuideNav إحداثيات مكانية دقيقة.
وهذا يتيح للمهندسين ربط كل عيب بموقعه الدقيق على طول خط الأنابيب.
الخطوة 4 إنشاء الخريطة
يقوم موجز البيانات المجمع ببناء خريطة عالية الدقة لتفتيش خط الأنابيب ، ومواءمة تقارير سلامة البنية التحتية مع الإحداثيات المادية - وهي عملية أصبحت ممكنة فقط من خلال الملاحة بالقصور الذاتي المدعومة بوحدات IMUs MEMS.
باختصار: من التسارع الخام إلى رسم الخرائط الدقيقة، تعتمد كل مرحلة من مراحل العملية على دقة واستقرار التحيز لوحدة IMU MEMS من GuideNav التي تعمل في بيئات صعبة تحت الأرض أو تحت سطح البحر.

دور استقرار التحيز في الملاحة تحت الأرض
لماذا يُعد استقرار التحيز أمرًا مهمًا؟
في روبوت فحص خطوط الأنابيب ، كل درجة من الانحراف لها أهميتها.
داخل خطوط الأنابيب الطويلة التي لا تدعم نظام GNSS التحيز الصغير يمكن أن يتراكم ليؤدي إلى أخطاء موضعية كبيرة بعد ساعات من السفر.
على سبيل المثال، قد يؤدي انحراف الجيروسكوب بمقدار 1 درجة/ساعة إلى انحراف الموضع المحسوب للروبوت بمسافة عدة أمتار - وهو ما يكفي لوضع علامة خاطئة على موقع التآكل.
ما الذي يسبب انحراف التحيز؟
عدم استقرار التحيز في وحدة قياس القصور الذاتي MEMS من:
- تقلبات درجة الحرارة داخل خط الأنابيب
- الاهتزازات والإجهادات الميكانيكية طويلة الأمد
- التباين في تصنيع وشيخوخة عناصر الأنظمة الكهروميكانيكية الصغرى
وتؤدي هذه العوامل تدريجيا إلى تشويه الملاحة بالقصور الذاتي ، مما يتسبب في رسم خرائط غير دقيقة وبيانات مواقع خاطئة.
كيف تحل وحدات قياس القصور الذاتي (IMUs) الصناعية (MEMS) هذه المشكلة؟
أجهزة الاستشعار الصناعية عالية الجودة مثل GuideNav MEMS IMUs :
- التعويض الرقمي ذو الحلقة المغلقة
- معايرة درجات الحرارة المتعددة
- تقدير التحيز في الوقت الفعلي عبر تصفية كالمان
ويضمن هذا استقرارًا ممتازًا للتحيز، مما يسمح لروبوت فحص خطوط الأنابيب بالسفر لعدة كيلومترات مع الحد الأدنى من الانحراف.
يحدد هذا الأداء الفرق بين أجهزة الاستشعار المخصصة للمستهلك وأنظمة الملاحة بالقصور الذاتي MEMS الصناعية المستخدمة في فحص البنية التحتية الدقيقة.
مكافحة الاهتزازات - التعويض الميكانيكي والخوارزمي
داخل خطوط الأنابيب النشطة، تعمل المضخات واضطرابات التدفق على خلق اهتزازات مستمرة تعمل على إزعاج الملاحة بالقصور الذاتي .
وحدات قياس القصور الذاتي MEMS منخفضة الدرجة قراءة هذه التذبذبات على أنها حركة حقيقية، مما يتسبب في الانجراف والموقف غير المستقر في روبوتات فحص خطوط الأنابيب .
وحدات IMUs MEMS من GuideNav هذه المشكلة من خلال التصميم الميكانيكي الدقيق والترشيح الرقمي وخوارزميات كالمان التكيفية التي تزيل التحيز الناجم عن الاهتزاز في الوقت الفعلي.
استقرار درجة الحرارة والمعايرة الحرارية
غالبًا ما تمتد خطوط الأنابيب عبر بيئات تتراوح من التربة المتجمدة إلى مناطق الضاغط الساخنة، حيث يمكن أن تؤدي التغيرات في درجات الحرارة إلى تشويه قراءات وحدات القياس بالقصور الذاتي (IMU) في الأنظمة الكهروميكانيكية الصغرى (MEMS)
تؤثر درجات الحرارة غير المستقرة على التحيز وعامل المقياس، مما يؤدي إلى انحراف الملاحة في روبوتات فحص خطوط الأنابيب .
وللتغلب على هذا، وحدات IMUs MEMS من GuideNav معايرة درجة الحرارة متعددة النقاط ونماذج التعويض الحراري الرقمية ، مما يضمن استقرار التحيز عبر درجات حرارة تتراوح من -40 درجة مئوية إلى +85 درجة مئوية.
ويضمن هذا دقة ثابتة في الملاحة بالقصور الذاتي في المهام طويلة الأمد، حتى في ظل التغيرات البيئية الشديدة - وهي ميزة حاسمة لعمليات الملاحة تحت الأرض أو تحت سطح البحر التي لا تدعم نظام GNSS .
دمج المستشعرات - مفتاح الدقة على المدى الطويل
حتى أكثر وحدات IMU MEMS تتراكم عليها الانجرافات بمرور الوقت.
للحفاظ على الدقة في روبوتات فحص خطوط الأنابيب يجب دمج بيانات الملاحة بالقصور الذاتي الخام
باستخدام تصفية كالمان أو دمج حالة الخطأ ، وحدات IMUs MEMS من GuideNav بدمج هذه الإشارات لتقدير وتصحيح التحيز بشكل مستمر.
يقلل هذا النهج متعدد المستشعرات من الخطأ التراكمي، مما يضمن مسارًا دقيقًا وتحديد موقع العيب على مسافات طويلة.
في البيئات التي لا تتوفر فيها تقنية GNSS اندماج المستشعر الذكي هذا هو ما يحول البيانات الخام بالقصور الذاتي إلى أداء ملاحي موثوق به في العالم الحقيقي.
لا يُسبب الانحراف غير المُراقب عطلًا فوريًا، ولكنه يُضعف الدقة تدريجيًا بمرور الوقت. إعادة المعايرة الدورية في المصنع على أداء وحدة قياس القصور الذاتي FOG ضمن حدود أدائها الأصلية.
اعتبارات هندسية لدمج وحدات قياس القصور الذاتي في الأنظمة الكهروميكانيكية الصغرى (MEMS)
حتى أكثر وحدات IMU MEMS قد تفقد أدائها إذا تم تثبيتها بشكل سيئ.
في روبوت فحص خطوط الأنابيب المحاذاة الميكانيكية الدقيقة والتركيب الصلب أمرًا حيويًا للملاحة بالقصور الذاتي .
يمكن أن يؤدي عدم المحاذاة بين محاور وحدة قياس القصور الذاتي وإطار جسم الروبوت إلى حدوث أخطاء في عامل المقياس وأخطاء في المحور المتقاطع والتي لا يمكن لأي برنامج تصحيحها بالكامل.
وحدات IMUs MEMS من GuideNav في المصنع إلى 200 جزء في المليون من التماثل العمودي وتوفر واجهات RS-422 أو CAN للتكامل السهل مع وحدات التحكم الصناعية.
يضمن التثبيت المناسب استقرار التحيز المستمر وتتبع الحركة بدقة، مما يتيح الملاحة الموثوقة في خطوط الأنابيب تحت الأرض التي لا تدعم نظام GNSS .
نظرة مستقبلية - MEMS IMU بمثابة عقل روبوتات خطوط الأنابيب المستقلة
تتجه روبوتات فحص خطوط الأنابيب من الجيل التالي
في جوهرها، توفر وحدات IMU MEMS الملاحة بالقصور الذاتي في البيئات التي لا تدعم GNSS ، مما يتيح التحكم الدقيق في الحركة ورسم خرائط العيوب.
ستدمج الأنظمة المستقبلية وحدات IMUs من GuideNav MEMS مع تحليلات الذكاء الاصطناعي من أجل ملاحة أكثر ذكاءً وتصحيحًا ذاتيًا - مما يجعل وحدة IMU ليس مجرد مستشعر، بل هو النواة الذكية لكل روبوت مستقل تحت الأرض.
